Clear Sky Science · en
Blasting ore size detection based on efficient dehazing network and multi-dimensional feature fusion
Why rock sizes matter in modern mining
At first glance, a pile of broken rock tumbling along a conveyor belt looks like just so much rubble. But for mine operators, the size of each chunk is money: it determines how much energy is needed to crush the ore, how smoothly machines run, and even how safe the operation is. This paper describes a new artificial intelligence system that can automatically measure the size of blasted ore in real time, even in the dusty, dim, and wet conditions of an operating mine—offering a path to more efficient and intelligent mining.
The challenge of seeing through dust and clutter
After explosives break rock in an open-pit mine, fragments ranging from fine gravel to boulders over half a meter across are loaded onto conveyor belts and into crushers. Traditionally, workers assessed particle size by manual sieving or by basic image-processing tricks such as thresholding and edge detection. These methods are slow, labor-intensive, and easily confused by dust, changing light, and rocks that touch or overlap. More sophisticated 3D systems using laser scanners or stereo cameras can be very accurate but are costly and hard to maintain in harsh industrial settings. Mines therefore need a tool that is cheap, robust, and fast, yet accurate enough to guide blasting and crushing decisions.
An upgraded eye for rocky scenes
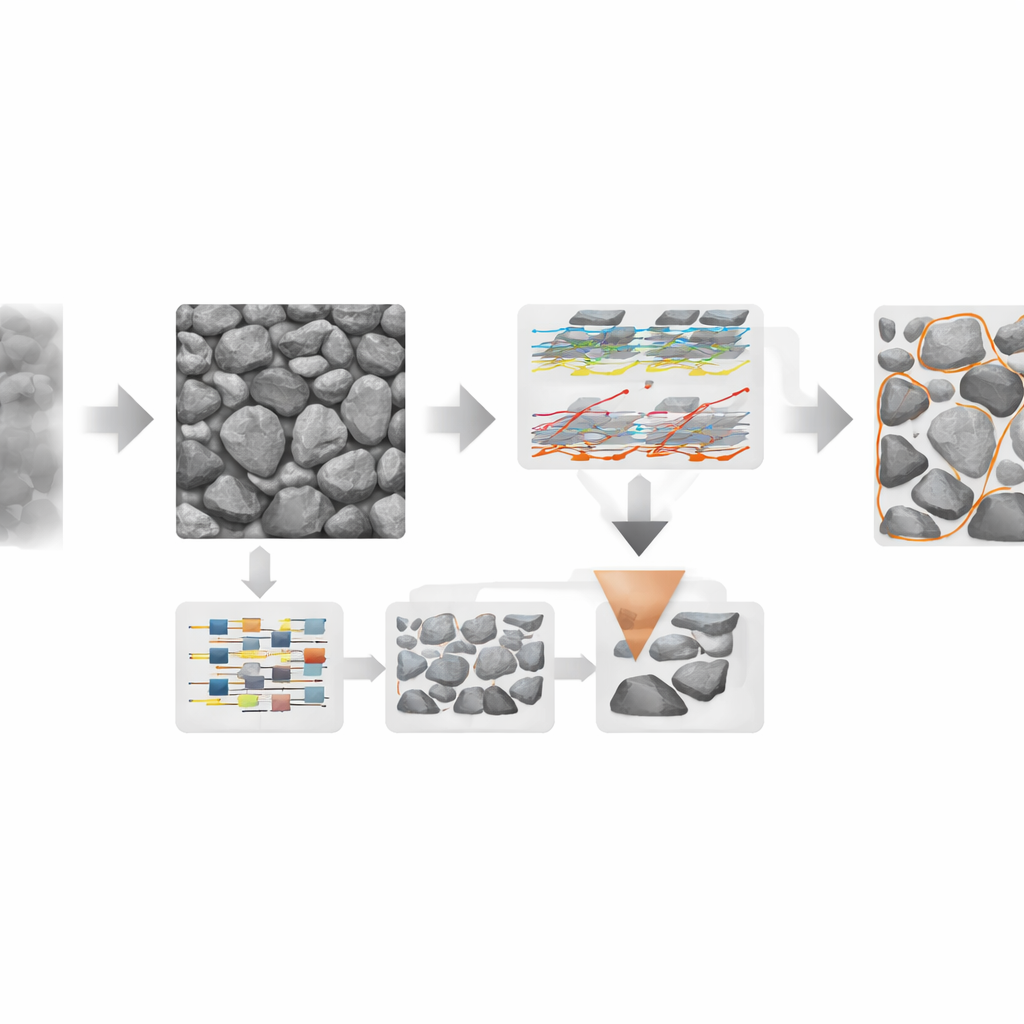
The authors build on YOLOv8, a popular real-time object detection network, and reshape it specifically for blasted ore. First, they insert a dust-removal module at the very front of the system. This module, adapted from an image “dehazing” network known as FFA-Net, is trained together with the detector instead of being a separate pre-processing step. It learns to enhance contrast, sharpen rock edges, and suppress the visual veil caused by smoke and fine particles. The cleaned image then flows into an efficient backbone made of MBConv blocks, which gradually expand the area each neuron “sees” while keeping the computation light enough for practical deployment at the crusher feed.
Finding both tiny chips and bulky boulders
The next innovation lies in how the system fuses information across scales. In real blast piles, small fragments are crammed between large blocks, and many pieces overlap. Standard versions of YOLO rely mainly on local convolution filters, which can miss tiny or partially hidden pieces. Here, the authors introduce a new “neck” module called I3SS that mixes straightforward convolutions with a sequence-modeling component inspired by recent state space models (Vmamba). Convolutions extract fine texture and edge cues, while the sequence part efficiently links distant pixels across the image without the heavy cost of transformer-style attention. A cross-path fusion design also brings in a higher-resolution feature map than usual so that details of fine ore are not washed out as features move toward the final detector.
A more adaptable decision stage
Finally, the team replaces YOLOv8’s fixed detection head with a “Dynamic Head” that can re-weight information depending on local conditions. This head pays attention to where in the image a rock appears, how large it is, and what kind of prediction is needed (presence, location, or size), and adjusts its internal emphasis accordingly. As a result, the system is less thrown off by motion blur, glare from lamps, or water-slick rock surfaces, all of which tend to soften boundaries and blend neighboring fragments together. The authors also assembled and carefully labeled a dedicated dataset of 356 high-resolution images from a real jaw-crusher feed, covering day and night scenes, dry and wet ore, and light to heavy dust.
How well the new system performs
When tested against a range of well-known detection models, the improved network outperforms both traditional two-stage detectors and several recent lightweight YOLO variants. Compared with the YOLOv8n baseline, the average precision across eight ore-size categories rises by about 7 percentage points, and the main benchmark score mAP at a standard overlap threshold increases by 7.6 percentage points. The gains are especially striking for the finest pieces: for ore smaller than roughly 72 millimeters, precision jumps by 18.8 percentage points and recall by 13.8, meaning far fewer small fragments are missed. On a simplified “all-ore” test, the system reaches a recall of 84% and an mAP of 88.1%, while keeping the processing speed adequate for conveyor belts that move relatively slowly.
What this means for smarter mining
In practical terms, this work delivers a camera-based tool that can monitor blast results continuously, under real production conditions, without expensive 3D hardware. By seeing through dust and disentangling crowded rock fragments, it provides more trustworthy statistics on particle-size distribution, particularly for small pieces that strongly influence downstream energy use. That information can feed back into how blasts are designed, how crushers are operated, and how energy budgets are planned, supporting safer and more efficient open-pit mining. The authors note that future extensions could add true shape segmentation or 3D cues, but even in its current form, the approach offers a robust and deployable step toward intelligent, data-driven control of ore breaking and processing.
Citation: Li, P., Xie, S., Zhang, W. et al. Blasting ore size detection based on efficient dehazing network and multi-dimensional feature fusion. Sci Rep 16, 11445 (2026). https://doi.org/10.1038/s41598-026-39514-3
Keywords: ore fragmentation, computer vision, deep learning, industrial monitoring, object detection