Clear Sky Science · ru
Определение размера руды после взрыва на основе эффективной сети для удаления дымки и многомерного слияния признаков
Почему размеры кусков важны в современной горнорудной промышленности
На первый взгляд груда расколотой породы, катящаяся по конвейеру, выглядит просто как груда щебня. Но для операторов карьеров размер каждого куска — это деньги: он определяет, сколько энергии потребуется для дробления руды, насколько плавно будут работать машины и даже насколько безопасна эксплуатация. В этой статье описана новая система искусственного интеллекта, которая может автоматически измерять размер обрушенной руды в реальном времени, даже в пыльных, тусклых и влажных условиях действующего карьера — предлагая путь к более эффективной и интеллектуальной разработке месторождений.
Проблема видимости через пыль и нагромождение
После взрывных работ в карьере порода дробится на фракции от мелкой гальки до валунов диаметром более полуметра и загружается на конвейеры и в дробилки. Традиционно размер частиц оценивали вручную через просеивание или простыми приёмами обработки изображений, такими как пороговая сегментация и детекция границ. Эти методы медлительны, трудозатратны и легко сбиваются пылью, меняющимся освещением и касающимися или перекрывающимися камнями. Более сложные 3D-системы с лазерными сканерами или стереокамерами могут быть очень точными, но дороги и трудно обслуживаются в суровых промышленных условиях. Поэтому шахтам нужен инструмент, который был бы недорогим, надёжным и быстрым, но при этом достаточно точным для управления решениями о взрыве и дроблении.
Улучшённое «глаз» для каменистых сцен
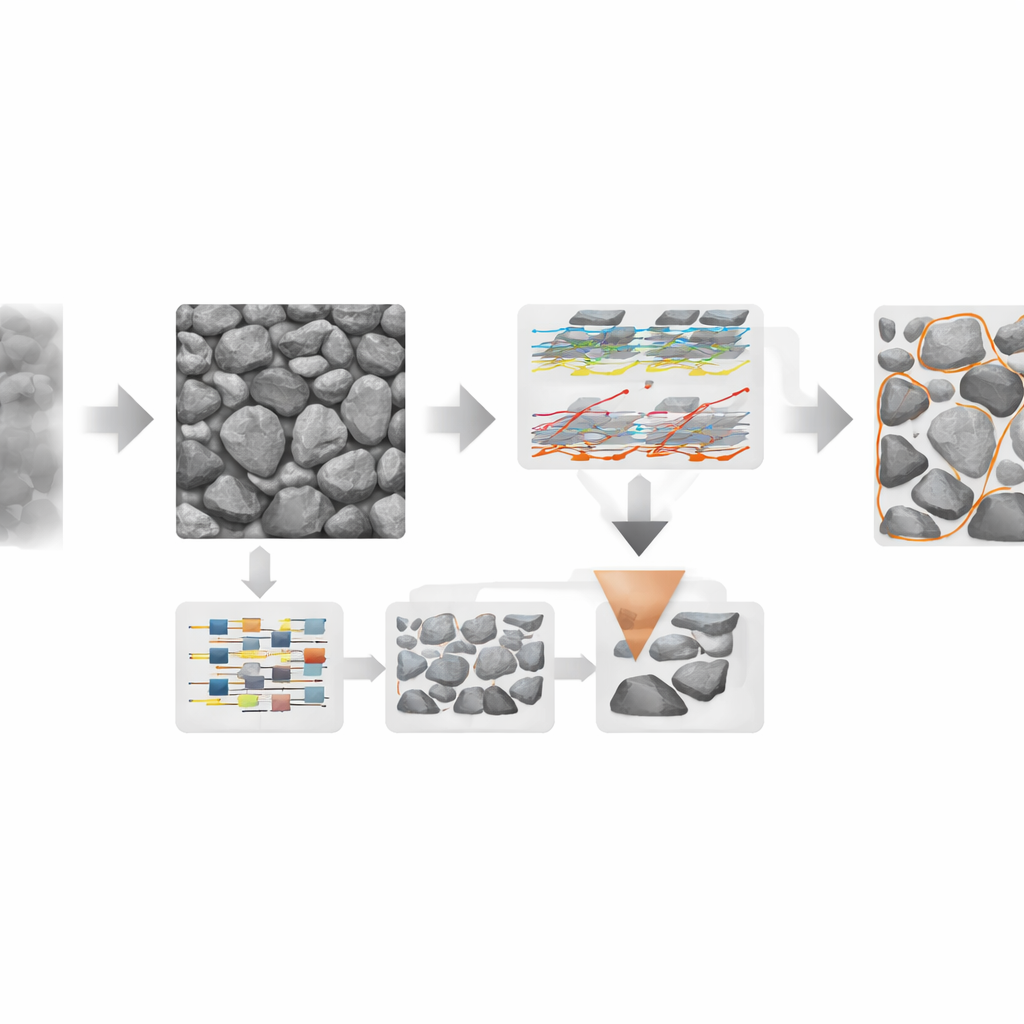
Авторы берут за основу YOLOv8, популярную сеть для обнаружения объектов в реальном времени, и перерабатывают её специально под задачу измерения руды после взрыва. Во-первых, они вставляют модуль удаления пыли в самую переднюю часть системы. Этот модуль, адаптированный из сети для удаления дымки FFA-Net, обучается совместно с детектором, а не служит отдельным шагом предобработки. Он учится улучшать контраст, уточнять контуры камней и подавлять визуальную вуаль, создаваемую дымом и мелкими частицами. Очищенное изображение затем поступает в эффективный «каркас» (backbone), собранный из блоков MBConv, которые постепенно расширяют площадь рецептивного поля нейронов, сохраняя при этом вычислительную лёгкость, достаточную для практического развёртывания у загрузочного лотка дробилки.
Поиск и крошек, и крупных валунов
Следующее нововведение — способ слияния информации на разных масштабах. В реальных завалах мелкие фракции втиснуты между большими глыбами, многие куски перекрываются. Стандартные версии YOLO в основном опираются на локальные свёртки, которые могут пропускать мелкие или частично скрытые объекты. Здесь авторы вводят новый «шеи» (neck) модуль I3SS, который смешивает простые свёртки с компонентом для моделирования последовательностей, вдохновлённым современными моделями состояния (Vmamba). Свёртки извлекают тонкую текстуру и подсказки по краям, тогда как последовательная часть эффективно связывает удалённые пиксели по изображению без тяжёлых вычислений, свойственных вниманию в стиле трансформеров. Дизайн с перекрёстным слиянием путей также добавляет карту признаков более высокого разрешения, чем обычно, чтобы детали мелкой руды не «размывались» по мере продвижения признаков к финальному детектору.
Более адаптивная стадия принятия решений
Наконец, команда заменяет фиксированную голову обнаружения YOLOv8 на «Динамическую голову», которая может перенастраивать веса информации в зависимости от локальных условий. Эта голова учитывает, где на изображении появляется камень, насколько он велик и какой тип предсказания требуется (наличие, положение или размер), и соответственно корректирует внутренние приоритеты. В результате система меньше сбивается с толку из‑за смаза движения, бликов от ламп или скользких от воды поверхностей, которые обычно смягчают границы и сливают соседние фрагменты. Авторы также собрали и аккуратно разметили специализированный набор данных из 356 изображений высокого разрешения с реальной загрузки щековой дробилки, охватывающий дневные и ночные сцены, сухую и влажную руду и разные уровни запылённости.
Насколько хорошо работает новая система
При тестировании на ряде известных моделей обнаружения улучшенная сеть превосходит как традиционные двухэтапные детекторы, так и несколько современных лёгких вариантов YOLO. По сравнению с базовой версией YOLOv8n средняя точность по восьми категориям размеров руды возрастает примерно на 7 процентных пунктов, а основной показатель mAP при стандартном пороге перекрытия увеличивается на 7,6 процентных пункта. Прирост особенно заметен для самых мелких частиц: для руды размером менее примерно 72 мм точность выросла на 18,8 процентных пункта, а полнота — на 13,8, что означает намного меньше пропущенных мелких фракций. В упрощённом тесте «вся руда» система достигает полноты 84% и mAP 88,1% при сохранении скорости обработки, достаточной для относительно медленно движущихся конвейеров.
Что это означает для более умной горной добычи
В практическом плане эта работа даёт инструмент на базе камеры, который может непрерывно контролировать результаты взрывов в реальных производственных условиях без дорогого 3D‑оборудования. Прозрачность через пыль и способность разъединять скомпонованные фрагменты руды обеспечивают более надёжную статистику распределения по размеру частиц, особенно для мелких кусочков, сильно влияющих на потребление энергии далее по технологической цепочке. Эта информация может возвращаться в проектирование взрывов, управление дробилками и планирование энергорасходов, обеспечивая более безопасную и эффективную разработку карьеров. Авторы отмечают, что в будущем возможны расширения с выделением реальной формы объектов или добавлением 3D‑подсказок, но и в текущем виде подход представляет собой надёжный и пригодный к развёртыванию шаг к интеллектуальному, основанному на данных управлению дроблением и переработкой руды.
Цитирование: Li, P., Xie, S., Zhang, W. et al. Blasting ore size detection based on efficient dehazing network and multi-dimensional feature fusion. Sci Rep 16, 11445 (2026). https://doi.org/10.1038/s41598-026-39514-3
Ключевые слова: фрагментация руды, компьютерное зрение, глубокое обучение, промышленный мониторинг, обнаружение объектов