Clear Sky Science · fr
Détection de la taille des minerais issus du tir basée sur un réseau de désembuage efficace et une fusion de caractéristiques multidimensionnelles
Pourquoi la taille des roches compte dans l'exploitation minière moderne
À première vue, un tas de rochers brisés qui défile sur un convoyeur ressemble à un simple amas de gravats. Mais pour les exploitants miniers, la taille de chaque fragment se traduit en argent : elle détermine l'énergie requise pour concasser le minerai, la fluidité de fonctionnement des machines et même la sécurité de l'exploitation. Cet article décrit un nouveau système d'intelligence artificielle capable de mesurer automatiquement la taille des minerais issus d'un tir en temps réel, même dans les conditions poussiéreuses, peu éclairées et humides d'une mine en activité — ouvrant la voie à une exploitation plus efficace et intelligente.
Le défi de voir à travers la poussière et l'encombrement
Après le tir d'explosifs dans une mine à ciel ouvert, des fragments allant du gravier fin à des blocs de plus d'un demi-mètre sont chargés sur des convoyeurs et dans des concasseurs. Traditionnellement, les opérateurs évaluaient la granulométrie par tamisage manuel ou par des astuces de traitement d'image basiques comme le seuillage et la détection de contours. Ces méthodes sont lentes, exigeantes en main-d'œuvre et facilement perturbées par la poussière, les variations d'éclairage et les roches qui se touchent ou se chevauchent. Des systèmes 3D plus sophistiqués utilisant des scanners laser ou des caméras stéréoscopiques peuvent être très précis mais sont coûteux et difficiles à entretenir en environnements industriels rudes. Les mines ont donc besoin d'un outil bon marché, robuste et rapide, mais suffisamment précis pour guider les décisions de tir et de concassage.
Un œil amélioré pour les scènes rocheuses
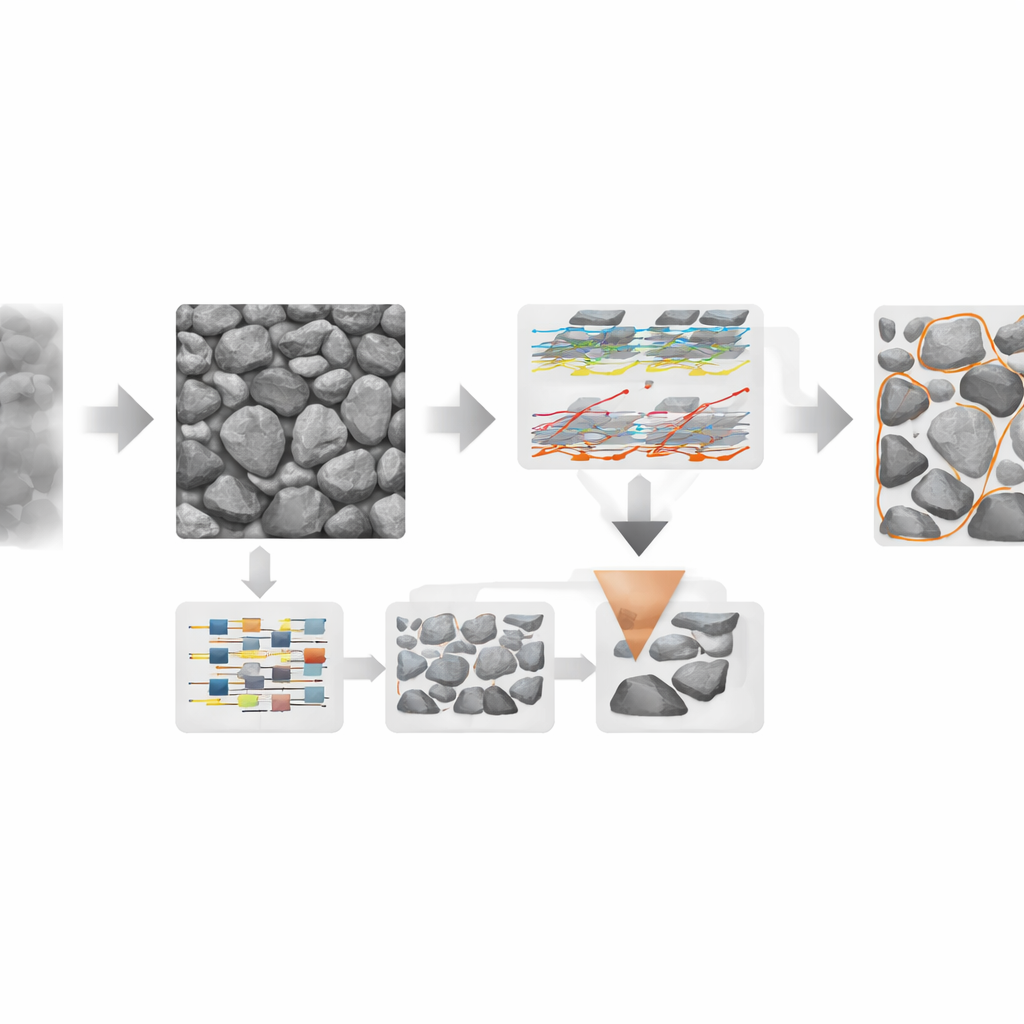
Les auteurs s'appuient sur YOLOv8, un réseau de détection d'objets en temps réel populaire, et le reconfigurent spécifiquement pour les minerais issus du tir. D'abord, ils insèrent un module d'élimination de la poussière en tout début de chaîne. Ce module, adapté d'un réseau de « désembuage » d'images connu sous le nom de FFA-Net, est entraîné conjointement avec le détecteur au lieu d'être un prétraitement séparé. Il apprend à améliorer le contraste, à affiner les contours des roches et à atténuer le voile visuel causé par la fumée et les particules fines. L'image nettoyée est ensuite transmise à une architecture efficiente composée de blocs MBConv, qui élargissent progressivement la zone perçue par chaque neurone tout en maintenant une charge computationnelle suffisamment légère pour un déploiement pratique à l'alimentation du concasseur.
Détecter à la fois les petites éclats et les gros blocs
L'innovation suivante porte sur la façon dont le système fusionne l'information à travers les échelles. Dans de véritables tas de tir, de petits fragments se nichent entre de gros blocs et de nombreux éléments se chevauchent. Les versions standard de YOLO s'appuient principalement sur des filtres convolutionnels locaux, qui peuvent manquer les pièces minuscules ou partiellement cachées. Ici, les auteurs introduisent un nouveau module de « cou » nommé I3SS qui mêle convolutions classiques et un composant de modélisation de séquences inspiré des récents modèles d'état d'espace (Vmamba). Les convolutions extraient des indices de texture et de contour fins, tandis que la partie séquence relie efficacement des pixels éloignés à travers l'image sans le coût important de l'attention de type transformer. Une conception de fusion en chemins croisés intègre également une carte de caractéristiques à résolution plus élevée que d'habitude afin que les détails des fines particules ne se perdent pas au fur et à mesure que les caractéristiques convergent vers le détecteur final.
Une étape décisionnelle plus adaptable
Enfin, l'équipe remplace la tête de détection fixe de YOLOv8 par une « Dynamic Head » qui peut réajuster le poids des informations en fonction des conditions locales. Cette tête prend en compte la position d'une roche dans l'image, sa taille et le type de prédiction requis (présence, localisation ou taille), et adapte son accent interne en conséquence. Il en résulte un système moins perturbé par le flou de mouvement, l'éblouissement des lampes ou les surfaces rocheuses vernissées d'eau, qui ont tendance à estomper les limites et à fusionner les fragments voisins. Les auteurs ont également assemblé et annoté avec soin un jeu de données dédié de 356 images haute résolution provenant d'une alimentation réelle de concasseur à mâchoires, couvrant des scènes de jour et de nuit, du minerai sec et humide, et des niveaux de poussière faibles à importants.
Quelle est la performance du nouveau système
Testé contre une gamme de modèles de détection bien connus, le réseau amélioré surpasse à la fois les détecteurs traditionnels en deux étapes et plusieurs variantes légères récentes de YOLO. Par rapport à la base YOLOv8n, la précision moyenne sur huit catégories de taille de minerai augmente d'environ 7 points de pourcentage, et le score de référence principal mAP à un seuil de recoupement standard augmente de 7,6 points de pourcentage. Les gains sont particulièrement marquants pour les plus fines particules : pour un minerai inférieur à environ 72 millimètres, la précision bondit de 18,8 points de pourcentage et le rappel de 13,8, ce qui signifie que beaucoup moins de petits fragments sont manqués. Sur un test simplifié « tout minerai », le système atteint un rappel de 84 % et un mAP de 88,1 %, tout en conservant une vitesse de traitement adaptée aux convoyeurs relativement lents.
Ce que cela signifie pour une exploitation minière plus intelligente
Concrètement, ce travail apporte un outil à base de caméra capable de surveiller en continu les résultats de tir, dans des conditions de production réelles, sans matériel 3D coûteux. En voyant à travers la poussière et en démêlant des fragments rocheux surchargés, il fournit des statistiques de distribution granulométrique plus fiables, en particulier pour les petites pièces qui influencent fortement la consommation d'énergie en aval. Ces informations peuvent rétroalimenter la conception des tirs, le fonctionnement des concasseurs et la planification des budgets énergétiques, favorisant une exploitation à ciel ouvert plus sûre et plus efficace. Les auteurs notent que des extensions futures pourraient ajouter une vraie segmentation de forme ou des indices 3D, mais même dans sa forme actuelle, l'approche constitue une étape robuste et déployable vers un contrôle intelligent et piloté par les données du concassage et du traitement du minerai.
Citation: Li, P., Xie, S., Zhang, W. et al. Blasting ore size detection based on efficient dehazing network and multi-dimensional feature fusion. Sci Rep 16, 11445 (2026). https://doi.org/10.1038/s41598-026-39514-3
Mots-clés: fragmentation du minerai, vision par ordinateur, apprentissage profond, surveillance industrielle, détéction d'objets