Clear Sky Science · tr
Gözlemci-diferansiyator şemasıyla kuantize doğrusal olmayan sistemler için pratik önceden tanımlı zamanlı uyarlanabilir bulanık kontrol
Neden hızlı ve güvenilir kontrol önemli?
Endüstriyel robotlardan uzaktan kumandalı araçlara kadar modern makineler, dijital iletişim nedeniyle bilgi bozulmuş veya gecikmiş olsa bile istenen hareketi çok hızlı ve doğru bir şekilde takip etmek zorunda kalır. Bu makale, hem makineye gönderilen komutların hem de geri gelen ölçümlerin düzgün sinyaller yerine kademe hâlinde kaba şekilde dijitalleştirildiği durumlarda, bir sistemin önceden seçilmiş bir süre içinde hedefe yakın bir noktada kararlığa ulaşmasını garantileyebilen kontrol algoritmalarını nasıl tasarlayabileceğimizi araştırıyor.
Düzgün sinyaller yerine dijital kademeler
Çok sayıda gerçek dünya uygulamasında kontrol sinyalleri sınırlı bant genişliğine sahip ağlar üzerinden iletilir. Sürekli değerler yerine, tıpkı her sayıyı en yakın kuruşa yuvarlamak gibi, “kuantize” edilerek ayrık kademelere dönüştürülürler. Aynı durum makinadan dönen sensör ölçümleri için de geçerli olabilir. Bu kademeli sinyaller iletişimi basitleştirir ancak hatalar ve ani değişimler getirir; uygun şekilde tasarlanmamış bir kontrolörün kullanılması durumunda titreme, enerji israfı ve hatta kararsızlık ortaya çıkabilir. Yazarların ele aldığı sistemler ayrıca son derece doğrusal olmayan ve iç değişkenlerin karmaşık bağlarla birbirine bağlı olduğu, standart tasarım araçlarının zorlandığı daha genel bir yapıda.
Ümit veren fikir: önceden tanımlı zamanda hedefe ulaşma
Geleneksel kontrol şemaları genellikle hataların nihai olarak sıfıra yaklaşmasını sağlar, fakat bunun ne kadar süreceğini belirtmez. Daha gelişmiş “sonlu zamanlı” ve “sabit zamanlı” yaklaşımlar kararlılık süresinin üst sınırını garanti edebilir, ancak bu sınır serbestçe seçilemez. Burada yazarlar, mühendislere sistemin hedefe yakın olmasının izin verilen maksimum süresini önceden belirleme imkânı tanıyan önceden-tanımlı-zaman kontrolü kavramı üzerine inşa ediyor. Bu, zaman açısından hassas uygulamalarda —örneğin uydu manevraları veya yüksek hızlı üretim— zaman penceresinin kaçırılmasının yüksek maliyetlere yol açabileceği durumlarda kritik öneme sahip.
Yeni araçlar: birlikte çalışan gözlemci ve diferansiyator
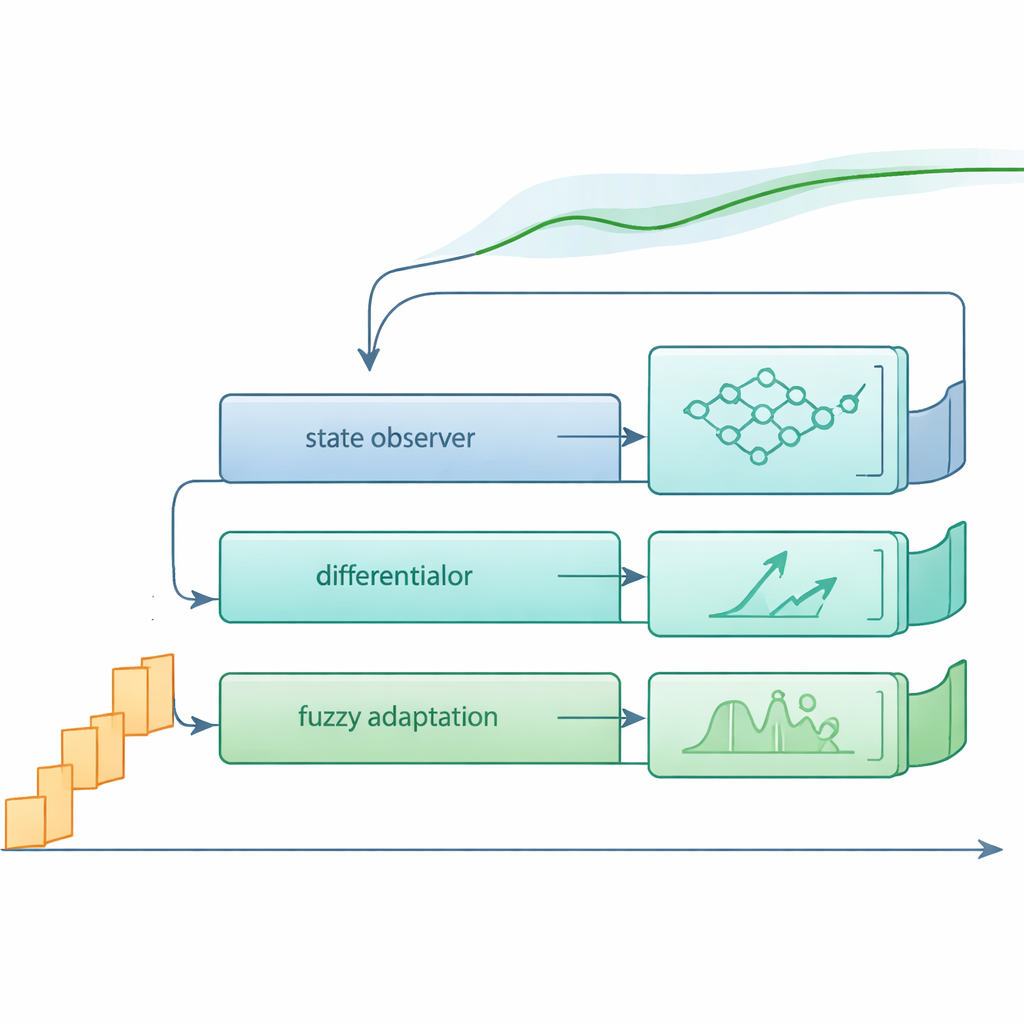
Şiddetli kuantizasyon altında bu önceden-tanımlı-zaman davranışını elde etmek için makale iki ana bileşen sunuyor. Birincisi, ters hiperbolik sinüs fonksiyonuna dayalı yeni bir durum gözlemcisi, yalnızca kuantize edilmiş çıktıyı kullanarak makinenin ölçülmeyen iç değişkenlerini tahmin ediyor. Pek çok önceki bulanık gözlemciden farklı olarak bu tasarım, bitkiye (plant) dair hassas bir matematiksel modele ihtiyaç duymuyor; bu da belirsiz veya kötü bilinen sistemler için daha uygun hâle getiriyor. İkincisi, yazarlar kuantize edilmiş sinyallerin düzensiz, türevlenemez doğasıyla başa çıkabilen birleşik bir diferansiyator öneriyor. Birden fazla filtre ve düzleştirici fonksiyon istiflemek—ki bu algoritmaları hantal ve analiz edilmesi zor hâle getirebilir—yerine tek bir diferansiyator, dijitalleştirilmiş ölçümlerin keskin köşelerini yatıştırıyor ve karmaşık hesaplamalardan oluşan bir ardışık yapıyı önlüyor.
Dijital kısıtlar altında uyarlanabilir bulanık kontrol
Bu sinyal işleme araçlarının üzerine yazarlar bir uyarlanabilir bulanık kontrolör kuruyor. Bilinmeyen doğrusal olmayan etkileri yaklaşıklamak için bulanık mantık kullanılırken, uyarlanabilir kurallar sistem çalıştıkça kontrolörün iç parametrelerini anlık olarak ayarlıyor. Tasarım, kapalı döngüdeki tüm sinyallerin sınırlı kalmasını ve takip hatasının—gerçek çıktının istenen referanstan ne kadar saptığı—seçilen zaman dilimi içinde sıfıra yakın, ayarlanabilir bir çevrede küçülmesini sağlayacak şekilde dikkatle yapılandırılmış. Önemli olarak, aynı çerçeve hem girişteki (kontrol gerilimi veya tork) hem de çıktıda (sensör okumaları) meydana gelen kuantizasyonla başa çıkıyor; bu, ağ bağlantılı kontrol sistemlerinde gerçek dünyada olanlara daha yakın bir durum.
Simüle edilmiş makinelerden kanıt
Yazarlar yaklaşımını simüle edilmiş doğrudan tahrikli bir robot kolu ve değişkenleri arasında güçlü matematiksel bağlar bulunan başka bir doğrusal olmayan sistem üzerinde test ediyor. Bu örneklerde, kontrolör sistem çıktısını önceden belirlenmiş süre içinde istenen yörüngeyi takip edecek şekilde sürüyor ve konum, hız ve motor akımı gibi iç nicelikleri kabul edilebilir sınırlar içinde tutuyor. Son zamanlarda önerilmiş bir alternatife yapılan karşılaştırmalar, yeni şemanın benzer veya daha iyi takip başarısı elde ederken daha küçük kontrol sinyali dalgalanmalarına ihtiyaç duyduğunu gösteriyor; bu da daha düşük enerji kullanımı ve aktüatörlerde daha az aşınma demek. Simülasyonlar ayrıca doğal bir takas gösteriyor: daha kısa bir oturma zamanı talep etmek hızı artırırken kontrol çabasını yükseltiyor; tasarımcılara performans ile maliyet arasında denge kurma imkânı veriyor.
Geleceğin akıllı makineleri için ne ifade ediyor?
Basitçe söylemek gerekirse, bu çalışma karmaşık ve kısmen bilinmeyen makineleri, kontrol ve ölçüm sinyalleri yoğun şekilde dijitalleştirilmiş olsa bile zaman açısından kritik komutlara güvenilir şekilde uyar hale getirmenin yollarını gösteriyor. Model bağımsız bir gözlemci, sadeleştirilmiş bir diferansiyator ve uyarlanabilir bir bulanık kontrolörün birleşimi sayesinde yöntem, kullanıcının seçtiği süre içinde sistemin hedefe yakın bir noktaya gelmesini ve mütevazı dalgalanmalarla orada kalmasını garanti edebiliyor. Bu, endüstriyel sürücülerden robotik ve ötesine kadar ağ bağlantılı ve kaynak kısıtlı ortamlarda daha öngörülebilir ve enerji verimli kontrole doğru bir yol açıyor.
Atıf: Wang, Y., Chen, J. & Ma, W. Practical predefined-time adaptive fuzzy control for quantized nonlinear systems via observer-differentiator scheme. Sci Rep 16, 11519 (2026). https://doi.org/10.1038/s41598-026-35313-y
Anahtar kelimeler: önceden-tanımlı-zaman kontrolü, uyarlanabilir bulanık kontrol, kuantize edilmiş sinyaller, doğrusal olmayan sistemler, durum gözlemcisi