Clear Sky Science · ar
التحكم الغامض التكيفي بزمن معرف عملي للأنظمة غير الخطية المكممة عبر مخطط الراصد-الممايز
لماذا يهم التحكم السريع والموثوق
تحتاج الآلات الحديثة—من الروبوتات الصناعية إلى المركبات التي تُدار عن بُعد—غالبًا إلى تتبع حركة مرغوبة بسرعة ودقة عاليتين، حتى عندما تتشوه المعلومات أو تتأخر بسبب الاتصالات الرقمية. تستعرض هذه الورقة كيفية تصميم خوارزميات تحكم تضمن أن يستقر النظام بالقرب من الهدف خلال زمن يُحدد مقدمًا، بالرغم من أن كلًا من الأوامر المرسلة إلى الآلة والقياسات العائدة تكون مكمَّمة إلى درجات بدلاً من أن تكون إشارات مستمرة.
خطوات رقمية بدل الإشارات المستمرة
في كثير من البيئات الحقيقية، تمر إشارات التحكم عبر شبكات ذات عرض نطاق محدود. بدلاً من قيم مستمرة، تُحوَّل هذه الإشارات إلى «كمات» متقطعة، كما لو أن كل رقم يُقرب إلى أقرب سنت. ويمكن أن يصيب الشيء نفسه قراءات المستشعرات العائدة من الآلة. تبسط هذه الإشارات المتدرجة عملية الاتصال لكنها تُدخل أخطاءً وتغيرات حادة، ما قد يسبب ارتعاشًا (chattering)، وهدرًا للطاقة، وحتى عدم استقرار إذا لم يُصمَّم المتحكم بعناية. الأنظمة التي يناقشها المؤلفون أيضًا شديدة اللاخطية ومن نوع عام أصعب في المعالجة حيث تُرتبط المتغيرات الداخلية بطرق معقدة تعجز الأدوات التصميمية التقليدية عن التعامل معها.
فكرة واعدة: الوصول إلى الهدف في زمن معرف مسبقًا
تضمن مخططات التحكم التقليدية غالبًا تقلص الأخطاء إلى الصفر في نهاية المطاف، لكن دون تحديد مدة هذا التقلص. يستطيع النهجان الأسبقان «زمن-نهاية محدود» و«زمن ثابت» أن يضمنا حدًا زمنيًا للاستقرار، إلا أن هذا الحد نفسه لا يمكن اختياره بحرية. يبني المؤلفون هنا على مفهوم التحكم بزمن معرف مسبقًا، الذي يسمح للمهندسين بتحديد حد أعلى مرغوب به مسبقًا للزمن الذي قد يستغرقه النظام ليقترب من الهدف. هذا أمر حاسم في تطبيقات حساسة للزمن مثل مناورة المركبات الفضائية أو التصنيع عالي السرعة، حيث يمكن أن تكون تكلفة فقد نافذة زمنية كبيرة.
أدوات جديدة: راصد وممايز يعملان معًا
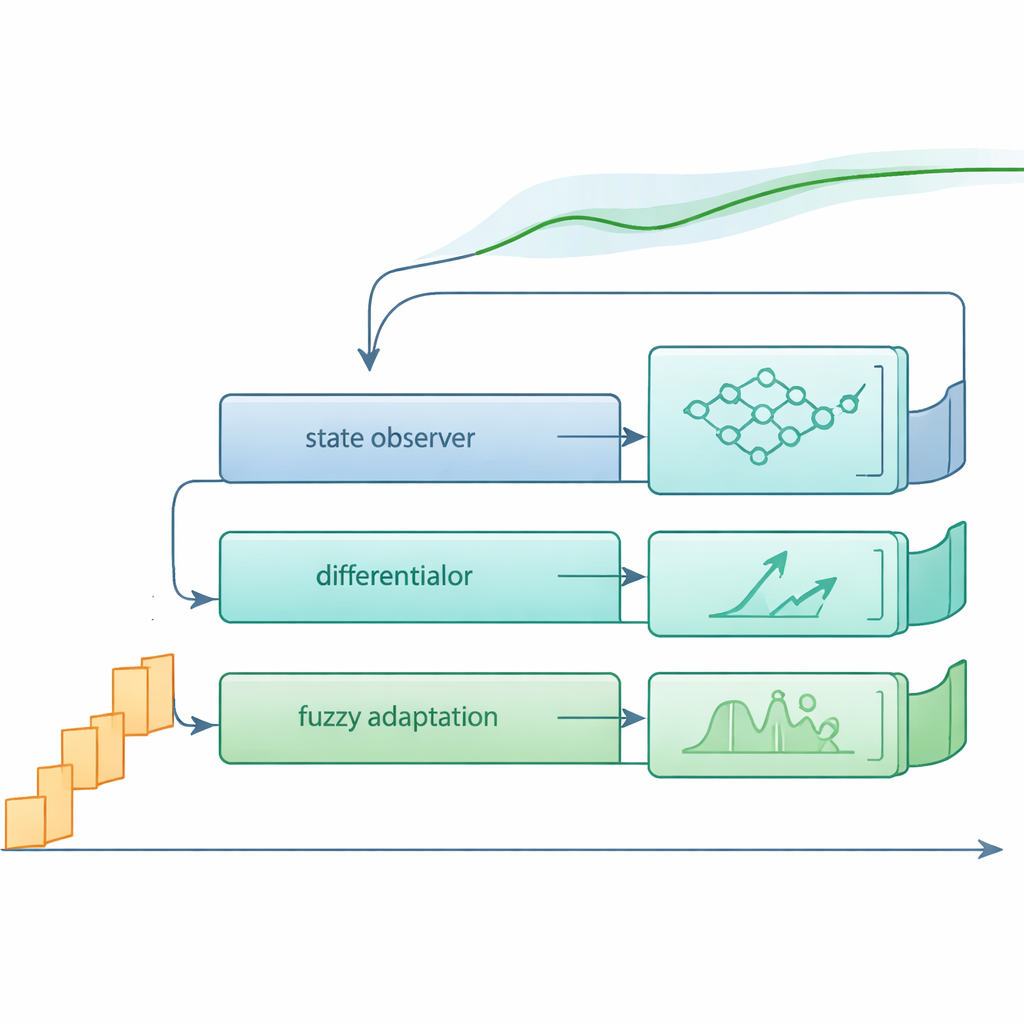
لتحقيق سلوك الزمن المعرف تحت كمَّة قاسية، تقدم الورقة مكوّنين أساسيين. أولًا، راصد حالة جديد قائم على دالة الظل العكسي الزائد (inverse hyperbolic sine) يقدّر المتغيرات الداخلية غير المقاسة للآلة باستخدام المخرج المكمَّم فقط. وعلى عكس العديد من الرُصد الغامض السابقة، لا يتطلب هذا التصميم نموذجًا رياضيًا دقيقًا للمصنع، مما يجعله أكثر ملاءمة للأنظمة غير المؤكدة أو غير المعروفة جيدًا. ثانيًا، يقترح المؤلفون مميزًا موحدًا يمكنه التعامل مع طبيعة الإشارات المكمَّمة غير الملساء وغير القابلة للاشتقاق. بدلًا من تكديس مرشحات متعددة ودوال تمليس—مما قد يجعل الخوارزميات ضخمة وصعبة التحليل—يعمل الميّاز الواحد على ترويض الزوايا الحادة للقياسات المرقّمة ويتجنب سلسلة من الحسابات المعقدة.
التحكم الغامض التكيفي تحت قيود رقمية
فوق هذه الأدوات لمعالجة الإشارة، يبني المؤلفون متحكمًا غامضًا تكيفيًا. تُستخدم المنطقية الضبابية لتقريب التأثيرات اللاخطية المجهولة، بينما تضبط قوانين تكيفية معلمات المتحكم الداخلية تلقائيًا مع سلوك النظام. تم هيكلة التصميم بعناية بحيث تبقى كل الإشارات في الحلقة المغلقة محدودة، ويقل خطأ التتبع—مدى انحراف المخرج الفعلي عن المرجع المرغوب—إلى جوار صغير قابل للضبط حول الصفر خلال نافذة الزمن المختارة. ومن المهم أن نفس الإطار يتعامل مع كمّية في كل من المدخل (جهد التحكم أو العزم) والمخرج (قراءات المستشعر)، وهو أقرب إلى ما يحدث في أنظمة التحكم المتصلة الحقيقية.
دليل من نماذج محاكاة لآلات
يختبر المؤلفون منهجهم على ذراع روبوتية ذات محرك مباشر في محاكاة وعلى نظام غير خطي آخر ذو اقتران رياضي قوي بين متغيراته. في هذه الأمثلة، يدفع المتحكم مخرج النظام ليتبع المسار المطلوب ضمن الزمن المحدد ويحافظ على كميات داخلية مثل الموضع والسرعة وتيار المحرك ضمن حدود مقبولة. تُظهر المقارنات مع طريقة بديلة حديثة أن المخطط الجديد يمكن أن يحقق تتبُّعًا مشابهًا أو أفضل بينما يتطلب تقلبات إشارة تحكم أصغر، ما يترجم إلى استهلاك طاقة أقل وتآكل أقل للمشغلات. توضح المحاكاة أيضًا مفاضلة طبيعية: طلب زمن استقرار أقصر يعزز السرعة لكنه يزيد الجهد التحكمي، مما يمنح المصممين وسيلة لموازنة الأداء مع التكلفة.
ما يعنيه هذا للآلات الذكية المستقبلية
بعبارات بسيطة، تُظهر هذه الدراسة كيف يمكن جعل آلات معقدة وغير معروفة جزئيًا تطيع أوامر حساسة للزمن بشكل موثوق، حتى عندما تكون إشارات التحكم والقياس مُكمَّمة بكثافة. من خلال الجمع بين راصد مستقل عن النموذج، ومميّز مبسّط، ومتحكم غامض تكيفي، يمكن للطريقة أن تضمن أن النظام يقترب من هدفه ضمن زمن يختاره المستخدم ويظل هناك بتقلبات متواضعة. يفتح هذا الطريق نحو تحكم أكثر قابلية للتنبؤ وكفاءة في استهلاك الطاقة في بيئات متصلة ومحدودة الموارد، من المحركات الصناعية إلى الروبوتات وما بعدها.
الاستشهاد: Wang, Y., Chen, J. & Ma, W. Practical predefined-time adaptive fuzzy control for quantized nonlinear systems via observer-differentiator scheme. Sci Rep 16, 11519 (2026). https://doi.org/10.1038/s41598-026-35313-y
الكلمات المفتاحية: التحكم بزمن معرف مسبقًا, التحكم الغامض التكيفي, الإشارات المكممة, الأنظمة غير الخطية, راصد الحالة