Clear Sky Science · es
Control difuso adaptativo práctico con tiempo predefinido para sistemas no lineales cuantizados mediante un esquema observador-diferenciador
Por qué importa un control rápido y fiable
Las máquinas modernas —desde robots industriales hasta vehículos teleoperados— a menudo deben seguir un movimiento deseado con gran rapidez y precisión, incluso cuando la información se distorsiona o retrasa por comunicaciones digitales. Este artículo explora cómo diseñar algoritmos de control que garanticen que un sistema se estabilice cerca de su objetivo dentro de un tiempo elegido de antemano, pese a que tanto las órdenes enviadas a la máquina como las mediciones recibidas estén digitalizadas en escalones en lugar de ser señales continuas.
Escalones digitales en lugar de señales suaves
En muchos entornos reales, las señales de control viajan por redes con ancho de banda limitado. En lugar de valores continuos, se «cuantizan» en pasos discretos, de forma similar a redondear cada número al céntimo más cercano. Lo mismo puede ocurrir con las lecturas de los sensores que vuelven desde la máquina. Estas señales escalonadas simplifican la comunicación pero introducen errores y cambios bruscos, que pueden provocar chattering, desperdicio de energía e incluso inestabilidad si el controlador no está diseñado con cuidado. Los sistemas que los autores consideran también son altamente no lineales y de un tipo más general y difícil de manejar, donde las variables internas están ligadas de maneras complejas con las que las herramientas de diseño estándar tienen dificultades.
Idea prometedora: alcanzar la meta en un tiempo predefinido
Los esquemas de control tradicionales suelen garantizar que los errores tiendan a cero con el tiempo, pero sin precisar cuánto tardará eso. Los enfoques más avanzados de «tiempo finito» y «tiempo fijo» pueden acotar el tiempo de asentamiento, sin embargo ese límite no puede escogerse libremente. Aquí, los autores se apoyan en el concepto de control con tiempo predefinido, que permite a los ingenieros especificar de antemano un límite superior deseado para el tiempo que el sistema puede tardar en acercarse al objetivo. Esto es crucial en aplicaciones sensibles al tiempo, como maniobras espaciales o manufactura de alta velocidad, donde perder una ventana temporal puede tener costos elevados.
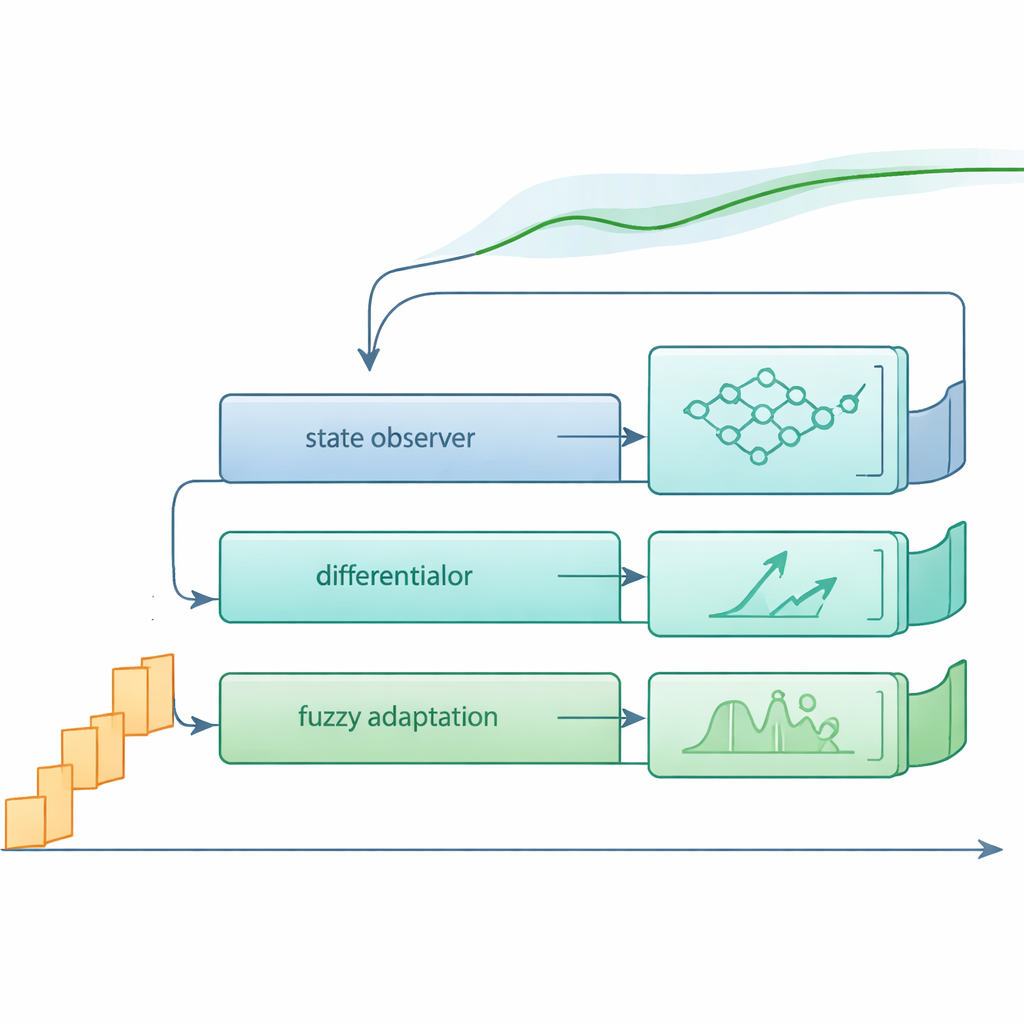
Nuevas herramientas: observador y diferenciador trabajando juntos
Para lograr este comportamiento de tiempo predefinido bajo una cuantización severa, el artículo introduce dos ingredientes clave. Primero, un nuevo observador de estado basado en la función arcsinh (seno hiperbólico inverso) estima las variables internas no medidas usando únicamente la salida cuantizada. A diferencia de muchos observadores difusos previos, este diseño no requiere un modelo matemático preciso de la planta, lo que lo hace más adecuado para sistemas inciertos o poco conocidos. Segundo, los autores proponen un diferenciador unificado capaz de manejar la naturaleza no suave y no diferenciable de las señales cuantizadas. En lugar de apilar múltiples filtros y funciones de suavizado —lo que puede hacer los algoritmos voluminosos y difíciles de analizar—, un único diferenciador tanto doma las esquinas agudas de las mediciones digitalizadas como evita una cascada de cálculos complejos.
Control difuso adaptativo bajo restricciones digitales
Sobre estas herramientas de procesamiento de señales, los autores construyen un controlador difuso adaptativo. La lógica difusa se usa para aproximar efectos no lineales desconocidos, mientras que leyes adaptativas ajustan los parámetros internos del controlador en tiempo real conforme el sistema se comporta. El diseño está cuidadosamente estructurado para que todas las señales en el lazo cerrado permanezcan acotadas, y el error de seguimiento —qué tan lejos se desvía la salida real respecto de la referencia deseada— se reduzca a una vecindad pequeña y ajustable de cero dentro de la ventana temporal escogida. Es importante destacar que el mismo marco hace frente a la cuantización tanto en la entrada (voltaje de control o par) como en la salida (lecturas de sensores), lo que se aproxima más a lo que ocurre en sistemas de control en red reales.
Evidencia a partir de máquinas simuladas
Los autores prueban su enfoque en un brazo robótico de accionamiento directo simulado y en otro sistema no lineal con un acoplamiento matemático fuerte entre sus variables. En estos ejemplos, el controlador hace que la salida del sistema siga la trayectoria deseada dentro del tiempo preestablecido y mantiene magnitudes internas como posición, velocidad y corriente del motor dentro de límites aceptables. Las comparaciones con un método alternativo reciente muestran que el nuevo esquema puede lograr un seguimiento similar o mejor requiriendo oscilaciones de señal de control menores, lo que se traduce en menor consumo de energía y menos desgaste de los actuadores. Las simulaciones también ilustran una compensación natural: exigir un tiempo de asentamiento más corto mejora la rapidez pero aumenta el esfuerzo de control, ofreciendo a los diseñadores un mando para equilibrar desempeño y coste.
Qué significa esto para las máquinas inteligentes del futuro
En términos sencillos, este trabajo muestra cómo lograr que máquinas complejas y parcialmente desconocidas obedezcan comandos críticos en tiempo de forma fiable, incluso cuando sus señales de control y medición están fuertemente digitalizadas. Al combinar un observador independiente del modelo, un diferenciador simplificado y un controlador difuso adaptativo, el método puede garantizar que el sistema se aproxime a su objetivo dentro de un tiempo elegido por el usuario y permanezca allí con fluctuaciones moderadas. Esto abre una vía hacia un control más predecible y eficiente enérgicamente en entornos en red y con recursos limitados, desde variadores industriales hasta robótica y más allá.
Cita: Wang, Y., Chen, J. & Ma, W. Practical predefined-time adaptive fuzzy control for quantized nonlinear systems via observer-differentiator scheme. Sci Rep 16, 11519 (2026). https://doi.org/10.1038/s41598-026-35313-y
Palabras clave: control con tiempo predefinido, control difuso adaptativo, señales cuantizadas, sistemas no lineales, observador de estado