Clear Sky Science · sv
Allmänt tvåskiktsramverk för optimering av efterfrågeanpassad transport
Smartare resor på begäran
Föreställ dig att du beställer en delad minibuss som plockar upp dig nära hemmet, lämnar dig nära jobbet eller en station och tyst laddar sitt batteri medan du sköter din dag. Denna artikel undersöker hur sådana on‑demand‑tjänster kan planeras så att många människor kan dela på en liten fordonsflotta, komma fram i tid och hålla kostnader och utsläpp låga. Författarna utformar och testar en generell planeringsmetod som kan hjälpa städer att gå förbi rigida busslinjer till förmån för mer flexibla, renare kollektivtrafiklösningar.
Vad resa‑på‑begäran egentligen innebär
Efterfrågeanpassad transport är en familj av tjänster där fordon inte följer fasta tidtabeller och rutter. Istället skickar resenärer in färdönskemål, ofta via en mobilapp, och systemet grupperar dem till delade turer, tilldelar fordon och bestämmer när och var fordonen ska köra. Runt om i världen testas sådana tjänster i förorter, landsbygdsområden och som ”sista milen”-länkar till tåg och tunnelbana. De lovar bättre tillgänglighet med färre fordon, men är svåra att driva väl: varje ny bokning kan ändra vem som reser med vem, vilka hållplatser som besöks och om passagerarna når sina mål i tid.
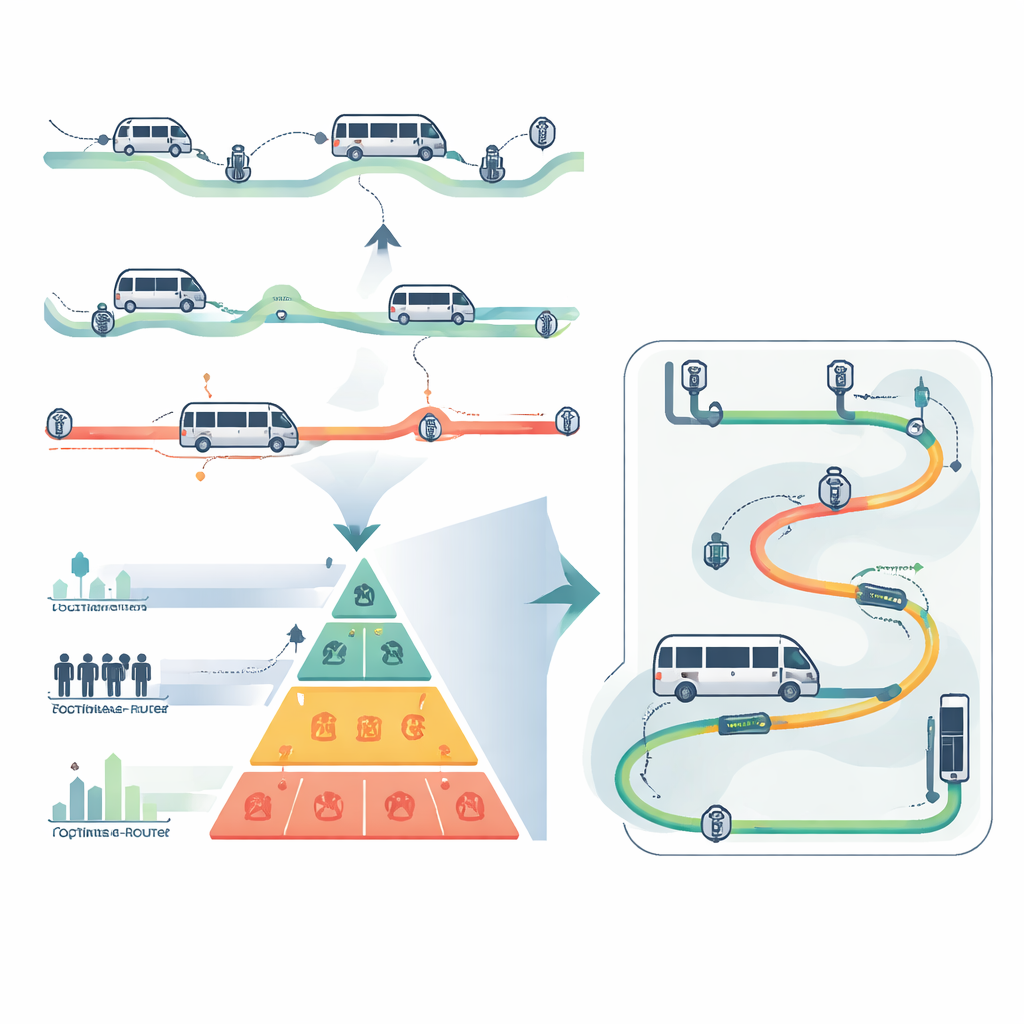
Två skikt av beslut för varje resa
Författarna föreslår ett tvånivåramverk som skiljer vad varje system måste göra från vad bara vissa system behöver. Det första skiktet täcker grunderna: att tilldela varje passagerare till ett eller flera fordon, bestämma i vilken ordning fordonen besöker hållplatser och kontrollera att kapacitets‑ och tidbegränsningar respekteras. Det andra skiktet lägger till praktiska tillägg. Det kan ta hänsyn till elfordon som måste laddas utan att batterierna tar slut, till delvis förplanerade delar av rutter som måste följas över tidsfönster, och till individuella passagerarönskemål såsom plats för rullstol eller wifi ombord. Eftersom dessa detaljer hålls i ett separat skikt kan städer anpassa samma kärnramverk till mycket olika lokala behov.
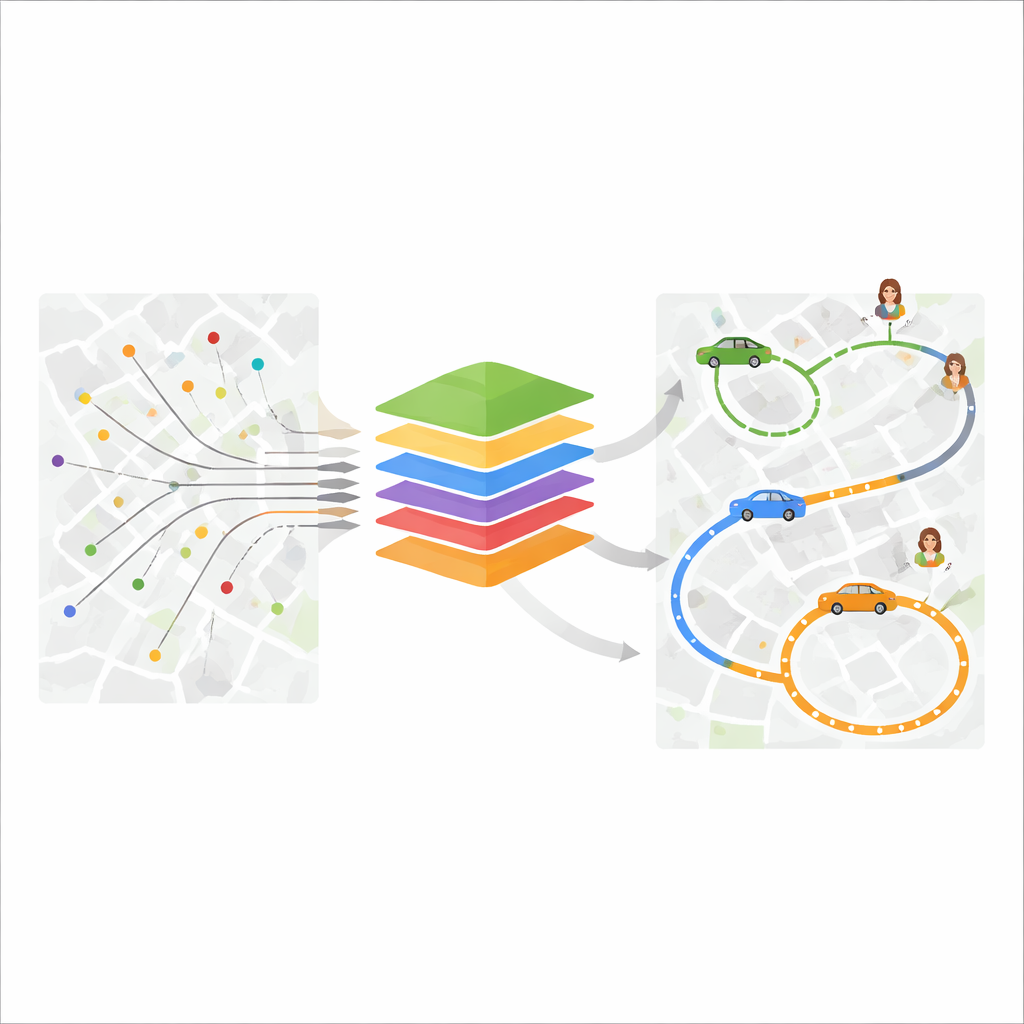
Tre sätt att låta fordon röra sig
En iögonfallande del av studien är jämförelsen av tre nivåer av ruttrörelsefrihet. I det mest flexibla alternativet ”General” kan fordon köra direkt mellan vilken par hållplatser som helst. I alternativet ”Sections” kan de bara röra sig längs bitar av fördefinierade linjer, men får byta mellan dem i korsningar. I det mest restriktiva alternativet ”Routes” cirklar varje fordon runt en enda fast rutt och passagerare byter mellan rutter vid behov. Man kan förvänta sig att den mest lösgivna versionen fungerar bäst eftersom den erbjuder fler möjligheter. I stället visar experiment baserade på bussnätet i Rzeszow, Polen, med 64 hållplatser, sex fordon (tre elektriska) och 200 passagerare motsatsen: alternativet med fasta rutter ger konsekvent lägst genomsnittlig försening och är dessutom mycket snabbare att beräkna, medan det helt fria alternativet tenderar att få algoritmen att fastna i komplicerade, ineffektiva ruttmönster.
Test av förseningar, belastningar och batterier
För att se hur modellen beter sig under ideala och röriga förhållanden byggde teamet två testdatamängder. I den första valdes färdönskemålen så att en perfekt, förseningsfri plan existerar. I den andra var förfrågningarna slumpmässiga, mer som i verkligheten där viss försening är oundviklig. För båda kördes ramverket i en grundläggande form och i en utökad form som inkluderar elfordonsladdning och särskilda passagerarfunktioner. Huvudmåttet för framgång var genomsnittlig passagerarförsening, men författarna följde också den största förseningen, hur många passagerare som var försenade över huvud taget, hur fulla fordonen var och hur batteriladdningen förändrades över tid. Med alternativen fasta rutter och sektionsbaserade rutter hittade systemet snabbt planer där genomsnittliga förseningar bara var några minuter, även när begränsningar för elfordon och passagerarpreferenser inkluderades. Modellen valde också när och var de elektriska fordonen skulle laddas så att batterinivåerna hölls inom säkra gränser samtidigt som passagerarna betjänades.
Val av vad som ska optimeras
Studien jämför också flera sätt att definiera ”bäst”. Att minimera genomsnittlig försening tenderar att förbättra hela systemet: de flesta passagerare anländer tidigare och även den mest försenade resenären är vanligtvis inte sämre ute än när andra mål används. Att försöka minimera enbart den värsta förseningen eller enbart antalet försenade passagerare kan däremot leda till planer där några få personer blir extremt försenade eller där fordon används ineffektivt. Detta antyder att fokus på den genomsnittlige resenärens upplevelse är ett bra kompromissmål, och att samma ramverk kan styras mot olika politiska mål genom att byta ut bara en funktion i modellen.
Vad detta betyder för vardagsresor
För icke‑experter är huvudbudskapet att väl utformade planeringsverktyg kan göra resa‑på‑begäran‑tjänster praktiska i stadsomfattning. Artikeln visar att ett enda, anpassningsbart ramverk kan tilldela passagerare till fordon, planera rutter, respektera särskilda behov och hantera elektriska batterier — samtidigt som genomsnittliga förseningar hålls låga. Kanske överraskande slår det ofta att ge fordonen viss struktur — som fasta eller halvfasta rutter — att låta dem röra sig fritt, eftersom det håller problemet hanterbart och leder till mer tillförlitlig service. När städer experimenterar med nya transportidéer, från elektriska skyttlar till appbaserad ”mikrotransit”, kommer ramverk som detta att vara avgörande för att omvandla spridda färdönskemål till smidiga, delade resor.
Citering: Bozek, A., Krzeszowski, T. & Sliwa, T. General two-level framework for demand-responsive transport optimization. Sci Rep 16, 14520 (2026). https://doi.org/10.1038/s41598-026-44833-6
Nyckelord: efterfrågeanpassad transport, delad mobilitet, smart stadstransport, elektriska skyttlar, ruttoptimering