Clear Sky Science · pl
Ogólne dwupoziomowe ramy optymalizacji transportu reagującego na popyt
Inteligentniejsze przejazdy na żądanie
Wyobraź sobie zamówienie wspólnego minibusa, który podwiezie cię blisko domu, wysadzi w pobliżu pracy lub stacji kolejowej i cicho doładuje baterię, podczas gdy ty zajmujesz się swoimi sprawami. W artykule analizuje się, jak planować takie usługi na żądanie, aby wielu pasażerów mogło korzystać z niewielkiej floty pojazdów, dojeżdżać na czas i jednocześnie ograniczać koszty oraz emisje. Autorzy opracowują i testują ogólną metodę planowania, która może pomóc miastom odejść od sztywnych linii autobusowych w kierunku bardziej elastycznego, czystszego transportu publicznego.
Co naprawdę znaczy przejazd na żądanie
Transport reagujący na popyt to rodzina usług, w których pojazdy nie poruszają się według stałych rozkładów i tras. Zamiast tego ludzie składają prośby o przejazd, często przez aplikację, a system grupuje je w wspólne kursy, przydziela pojazdy i decyduje, dokąd i kiedy mają się udać. Na świecie takie rozwiązania testuje się na przedmieściach, na obszarach wiejskich oraz jako połączenia „ostatniej mili” do pociągów i metra. Obiecują lepszy dostęp przy mniejszej liczbie pojazdów, ale ich sprawne prowadzenie jest trudne: każde nowe zamówienie może zmienić, kto z kim jedzie, które przystanki są odwiedzane i czy pasażerowie dotrą na czas.
Dwie warstwy myślenia dla każdej podróży
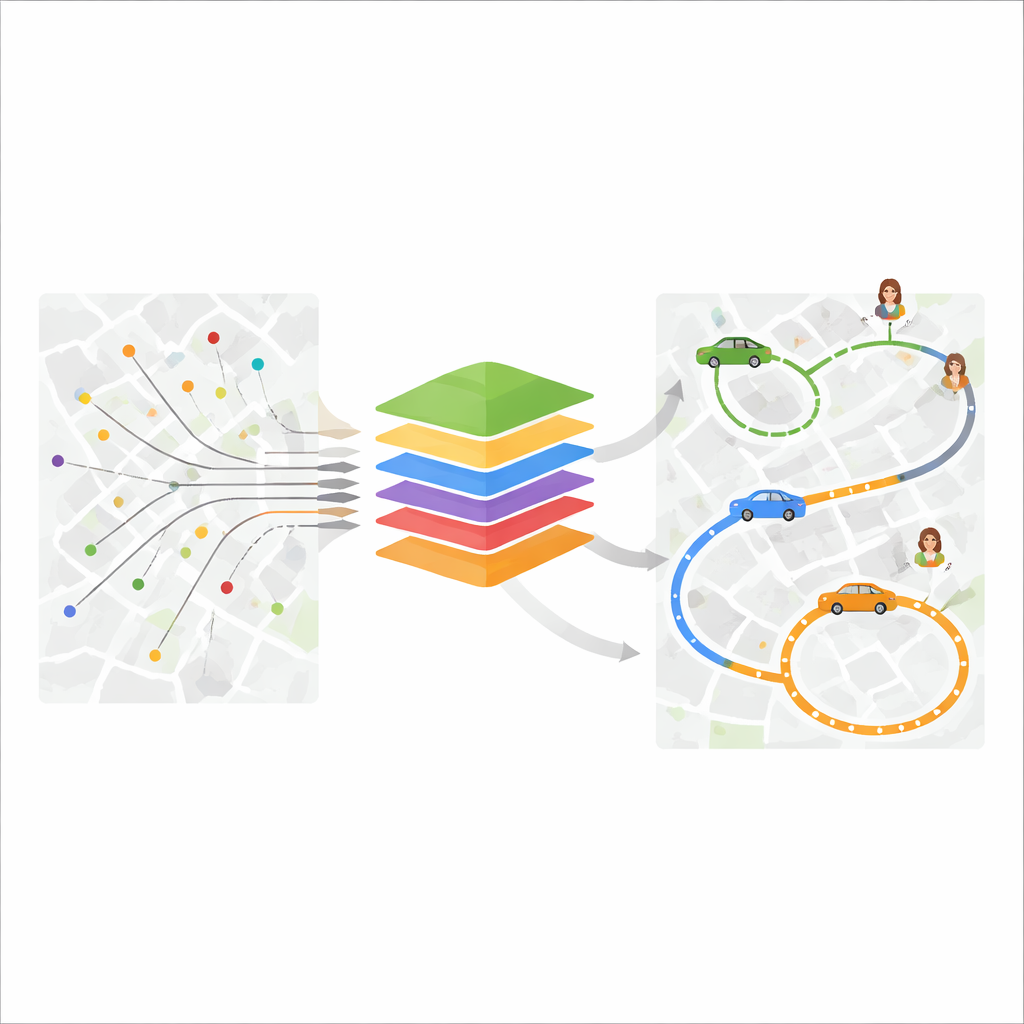
Autorzy proponują dwupoziomowe ramy planowania, które rozdzielają to, co każdy system musi robić, od tego, co potrzebne jest tylko w niektórych systemach. Pierwszy poziom obejmuje podstawy: przydzielanie każdego pasażera do jednego lub kilku pojazdów, ustalanie kolejności odwiedzania przystanków przez pojazdy oraz sprawdzanie, czy przestrzegane są ograniczenia pojemności i czasowe. Drugi poziom dodaje praktyczne elementy. Może uwzględniać pojazdy elektryczne, które muszą się ładować, aby nie wyczerpać baterii, częściowo zaplanowane odcinki tras, które należy zachować w określonych oknach czasowych, oraz indywidualne życzenia pasażerów, takie jak miejsce dla wózka inwalidzkiego czy Wi‑Fi na pokładzie. Ponieważ te szczegóły są utrzymywane w oddzielnej warstwie, miasta mogą dostosować tę samą podstawową ramę do bardzo różnych lokalnych potrzeb.
Trzy sposoby pozwolenia pojazdom na przemieszczanie się
Uderzającym elementem badania jest porównanie trzech poziomów swobody ruchu. W najbardziej elastycznej opcji „General” pojazdy mogą poruszać się bezpośrednio między dowolnymi parami przystanków. W opcji „Sections” mogą się poruszać tylko wzdłuż odcinków zdefiniowanych linii, ale mogą się przesiadać na skrzyżowaniach. W najbardziej restrykcyjnej opcji „Routes” każdy pojazd krąży po jednej, stałej trasie, a pasażerowie przesiadają się między trasami w razie potrzeby. Można by oczekiwać, że najbardziej luźna wersja będzie działać najlepiej, bo daje najwięcej możliwości. Zamiast tego eksperymenty oparte na sieci autobusowej Rzeszowa w Polsce, z 64 przystankami, sześcioma pojazdami (trzema elektrycznymi) i 200 pasażerami, pokazują coś przeciwnego: opcja ze stałą trasą konsekwentnie daje najniższe średnie opóźnienie i jest też znacznie szybsza do obliczenia, podczas gdy w pełni swobodna opcja ma tendencję do wpędzania algorytmu w skomplikowane, nieefektywne wzorce tras.
Testowanie opóźnień, obciążeń i baterii
Aby zobaczyć, jak model zachowuje się w idealnych i chaotycznych warunkach, zespół zbudował dwa zestawy testowe. W pierwszym żądania przejazdów były wybrane tak, by istniał idealny plan bez opóźnień. W drugim żądania były losowe, bardziej podobne do rzeczywistości, gdzie pewne spóźnienia są nieuniknione. Dla obu zestawów ramy uruchomiono w formie podstawowej oraz w rozszerzonej, która uwzględniała ładowanie pojazdów elektrycznych i specjalne cechy pasażerów. Główną miarą sukcesu było średnie opóźnienie pasażera, ale autorzy śledzili też największe opóźnienie, liczbę pasażerów, którzy byli w ogóle spóźnieni, stopień wypełnienia pojazdów oraz zmiany poziomu naładowania baterii w czasie. W opcjach ze stałą trasą i opartych na odcinkach system szybko znajdował plany, w których średnie opóźnienia wynosiły zaledwie kilka minut, nawet gdy uwzględniono ograniczenia związane z pojazdami elektrycznymi i preferencje pasażerów. Model także wybierał, kiedy i gdzie ładować pojazdy elektryczne, tak aby poziomy baterii pozostawały w bezpiecznych granicach, przy jednoczesnym obsługiwaniu pasażerów.
Wybór, co optymalizować
Badanie porównuje także kilka sposobów definiowania „najlepszego”. Minimalizacja średniego opóźnienia ma tendencję do poprawiania działania całego systemu: większość pasażerów przybywa wcześniej, a nawet najbardziej opóźniony podróżny zwykle nie jest w gorszej sytuacji niż przy innych celach. Z kolei próby minimalizacji tylko największego opóźnienia lub tylko liczby spóźnionych pasażerów mogą prowadzić do planów, w których kilka osób jest skrajnie spóźnionych albo pojazdy są używane nieefektywnie. Sugeruje to, że skupienie się na doświadczeniu przeciętnego pasażera to dobry kompromis, a tę samą ramę można nakierować na różne cele polityczne, zmieniając tylko jedną funkcję w modelu.
Co to oznacza dla codziennych podróży
Dla osób niebędących ekspertami najważniejszy przekaz jest taki, że dobrze zaprojektowane narzędzia planistyczne mogą uczynić usługi na żądanie praktycznymi w skali miasta. Artykuł pokazuje, że jedna, elastyczna rama może przydzielać pasażerów do pojazdów, planować trasy, honorować specjalne potrzeby i zarządzać bateriami elektrycznymi, wszystko przy utrzymaniu niskiego średniego opóźnienia. Co może zaskakiwać, nadanie pojazdom pewnej struktury — na przykład stałych lub półstałych tras — często przewyższa pozwolenie im na całkowitą swobodę, ponieważ utrzymuje problem w ryzach i prowadzi do bardziej niezawodnej obsługi. Gdy miasta eksperymentują z nowymi pomysłami transportowymi, od elektrycznych shuttle’ów po aplikacyjne „micro‑transit”, takie ramy będą niezbędne, by rozproszone żądania podróży zamienić w płynne, wspólne przejazdy.
Cytowanie: Bozek, A., Krzeszowski, T. & Sliwa, T. General two-level framework for demand-responsive transport optimization. Sci Rep 16, 14520 (2026). https://doi.org/10.1038/s41598-026-44833-6
Słowa kluczowe: transport reagujący na popyt, dostępna mobilność, transport inteligentnego miasta, elektryczne minibusy, optymalizacja tras