Clear Sky Science · it
Quadro generale a due livelli per l’ottimizzazione del trasporto a chiamata
Viaggi più intelligenti su richiesta
Immaginate di ordinare una minibus condivisa che vi venga a prendere vicino a casa, vi lasci vicino al lavoro o a una stazione ferroviaria e ricarichi silenziosamente la batteria mentre voi proseguite la giornata. Questo articolo esplora come pianificare tali servizi on‑demand in modo che molte persone possano condividere una piccola flotta di veicoli, arrivare puntuali e mantenere bassi costi ed emissioni. Gli autori progettano e testano un metodo di pianificazione generale che potrebbe aiutare le città a superare le linee di autobus rigide verso un trasporto pubblico più flessibile e pulito.
Cosa significa davvero il trasporto su richiesta
Il trasporto a chiamata è una famiglia di servizi in cui i veicoli non seguono orari e percorsi fissi. Al contrario, le persone inviano richieste di viaggio, spesso tramite un’app, e il sistema le raggruppa in corse condivise, assegna i veicoli e decide quando e dove questi devono andare. In tutto il mondo tali servizi sono sperimentati nelle periferie, nelle aree rurali e come collegamenti “ultimo miglio” verso treni e metropolitane. Promettono migliore accesso con meno veicoli, ma sono difficili da gestire bene: ogni nuova prenotazione può cambiare chi condivide la corsa, quali fermate vengono visitate e se i passeggeri arrivano in orario.
Due livelli di ragionamento per ogni viaggio
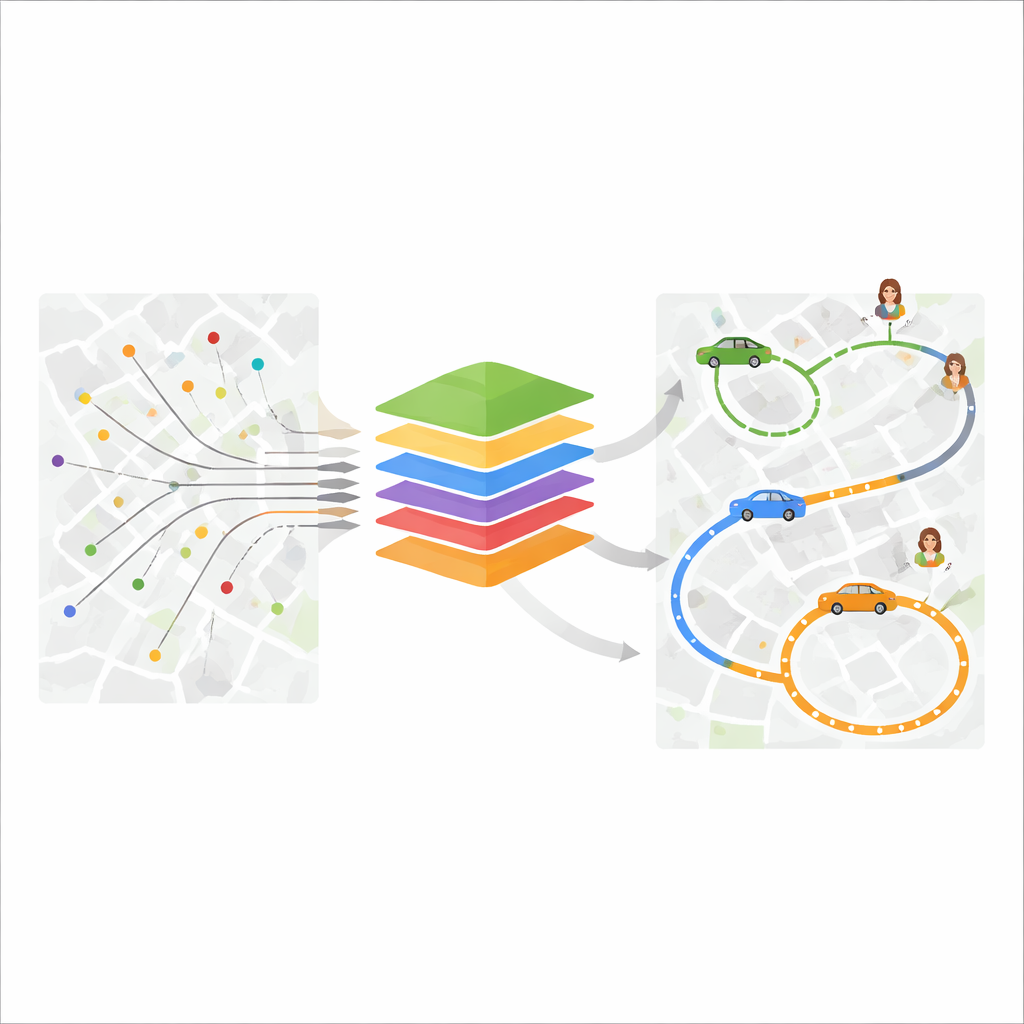
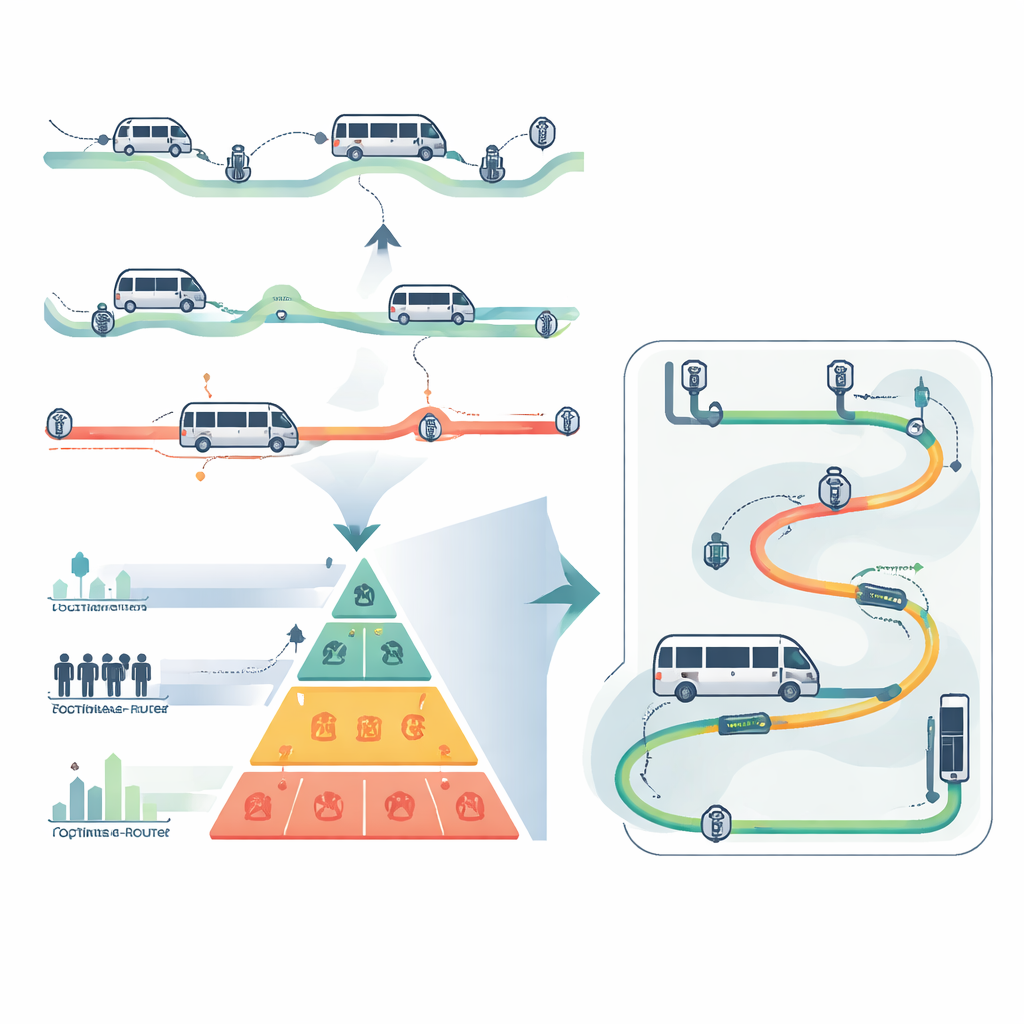
Gli autori propongono un quadro di pianificazione a due livelli che separa ciò che ogni sistema deve fare da ciò che soltanto alcuni sistemi richiedono. Il primo livello copre le basi: assegnare ogni passeggero a uno o più veicoli, decidere l’ordine in cui i veicoli visitano le fermate e verificare che i limiti di capacità e di tempo siano rispettati. Il secondo livello aggiunge elementi pratici. Può tenere conto di veicoli elettrici che devono essere ricaricati senza esaurire la batteria, di tratti di percorso parzialmente pre‑pianificati da rispettare in determinate finestre temporali e di desideri individuali dei passeggeri come spazio per sedie a rotelle o Wi‑Fi a bordo. Poiché questi dettagli sono mantenuti in un livello separato, le città possono adattare lo stesso nucleo del quadro a bisogni locali molto diversi.
Tre modi per lasciare libertà ai veicoli
Una parte interessante dello studio è il confronto tra tre livelli di libertà di instradamento. Nell’opzione più flessibile, “Generale”, i veicoli possono viaggiare direttamente tra qualsiasi coppia di fermate. Nell’opzione “Tratti”, possono muoversi solo lungo pezzi di linee predefinite, ma possono cambiare tra di esse agli incroci. Nell’opzione più restrittiva, “Rotte”, ogni veicolo circola attorno a una singola rotta fissa e i passeggeri si trasferiscono tra le rotte quando necessario. Ci si potrebbe aspettare che la versione più libera funzioni meglio, poiché offre più possibilità. Invece, esperimenti basati sulla rete di autobus di Rzeszów, Polonia, con 64 fermate, sei veicoli (tre elettrici) e 200 passeggeri, mostrano l’opposto: l’opzione a rotta fissa fornisce costantemente il ritardo medio più basso ed è anche molto più veloce da calcolare, mentre l’opzione completamente libera tende a intrappolare l’algoritmo in schemi di percorso complicati e inefficienti.
Test su ritardi, carichi e batterie
Per verificare il comportamento del modello in condizioni ideali e realistiche, il team ha creato due set di test. Nel primo, le richieste di viaggio sono state scelte in modo che esistesse un piano perfetto senza ritardi. Nel secondo, le richieste erano casuali, più simili alla vita reale, in cui qualche ritardo è inevitabile. Per entrambi, il quadro è stato eseguito in una versione di base e in una estesa che include la ricarica dei veicoli elettrici e caratteristiche speciali per i passeggeri. La misura principale di successo è stata la tardività media dei passeggeri, ma gli autori hanno anche monitorato il peggior ritardo, quanti passeggeri sono arrivati in ritardo, quanto erano pieni i veicoli e come variava la carica delle batterie nel tempo. Con le opzioni a rotta fissa e basata su tratti, il sistema ha rapidamente trovato piani in cui i ritardi medi erano di pochi minuti, anche quando venivano incluse le restrizioni dei veicoli elettrici e le preferenze dei passeggeri. Il modello ha inoltre scelto quando e dove ricaricare i veicoli elettrici, mantenendo i livelli di batteria entro limiti sicuri pur continuando a servire i passeggeri.
Scegliere cosa ottimizzare
Lo studio confronta anche diversi modi di definire il “meglio”. Minimizzare il ritardo medio tende a migliorare l’intero sistema: la maggior parte dei passeggeri arriva prima e anche il passeggero più in ritardo di solito non è messo peggio rispetto ad altre metriche. Cercare di minimizzare soltanto il peggior ritardo o soltanto il numero di passeggeri in ritardo, al contrario, può portare a piani in cui poche persone sono estremamente in ritardo o i veicoli sono usati in modo inefficiente. Questo suggerisce che concentrarsi sull’esperienza del passeggero tipico sia un buon compromesso, e che lo stesso quadro possa essere orientato verso diversi obiettivi politici semplicemente cambiando una funzione nel modello.
Cosa significa per gli spostamenti di tutti i giorni
Per i non esperti, il messaggio chiave è che strumenti di pianificazione ben progettati possono rendere i servizi su richiesta praticabili su scala urbana. L’articolo mostra che un quadro singolo e adattabile può assegnare i passeggeri ai veicoli, pianificare i percorsi, rispettare esigenze speciali e gestire le batterie elettriche, mantenendo nel contempo bassi i ritardi medi. Forse sorprendentemente, dare ai veicoli una certa struttura — come rotte fisse o semi‑fisse — spesso è meglio che lasciarli vagare liberamente, perché mantiene il problema gestibile e porta a un servizio più affidabile. Mentre le città sperimentano nuove idee di trasporto, dalle navette elettriche al “micro‑transit” basato su app, quadri come questo saranno essenziali per trasformare richieste di viaggio sparse in percorsi condivisi fluidi.
Citazione: Bozek, A., Krzeszowski, T. & Sliwa, T. General two-level framework for demand-responsive transport optimization. Sci Rep 16, 14520 (2026). https://doi.org/10.1038/s41598-026-44833-6
Parole chiave: trasporto a chiamata, mobilità condivisa, trasporto intelligente urbano, navette elettriche, ottimizzazione dei percorsi