Clear Sky Science · en
General two-level framework for demand-responsive transport optimization
Smarter rides on demand
Imagine ordering a shared minibus that picks you up close to home, drops you near work or a train station, and quietly recharges its battery while you go about your day. This paper explores how to plan such on‑demand services so that many people can share a small fleet of vehicles, arrive on time, and keep costs and emissions low. The authors design and test a general planning method that could help cities move beyond rigid bus lines toward more flexible, cleaner public transport.
What ride‑on‑request really means
Demand‑responsive transport is a family of services where vehicles do not follow fixed timetables and routes. Instead, people place trip requests, often via a phone app, and the system groups them into shared rides, assigns vehicles, and decides when and where those vehicles should go. Around the world, such services are being tried in suburbs, rural areas, and as “last‑mile” links to trains and metros. They promise better access with fewer vehicles, but they are hard to run well: each new booking can change who rides with whom, which stops are visited, and whether passengers reach their destinations on time.
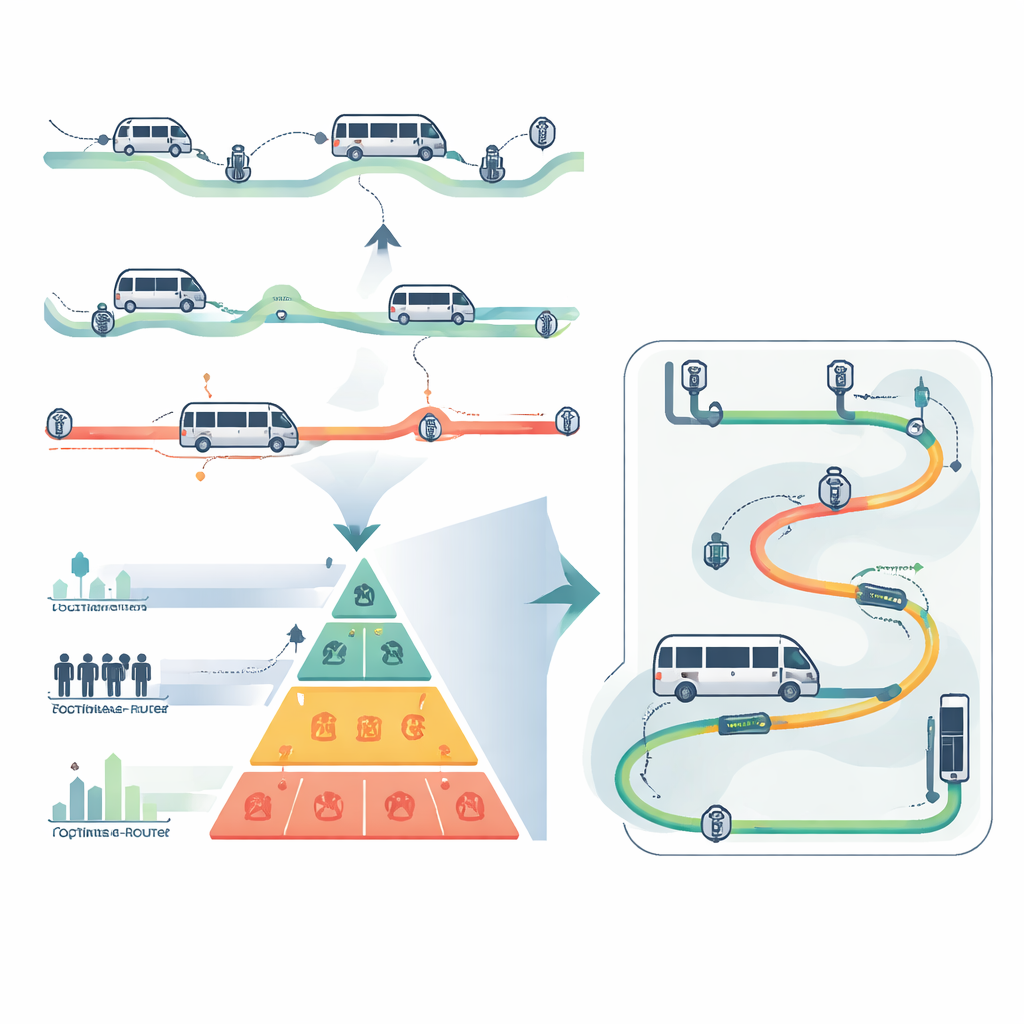
Two layers of thinking for each trip
The authors propose a two‑level planning framework that separates what every system must do from what only some systems need. The first level covers the basics: assigning each passenger to one or more vehicles, deciding the order in which vehicles visit stops, and checking that capacity and timing limits are respected. The second level adds practical extras. It can account for electric vehicles that must be charged without running out of battery, for partially pre‑planned pieces of routes that must be respected across time windows, and for individual passenger wishes such as wheelchair space or on‑board Wi‑Fi. Because these details are kept in a separate layer, cities can tailor the same core framework to very different local needs.
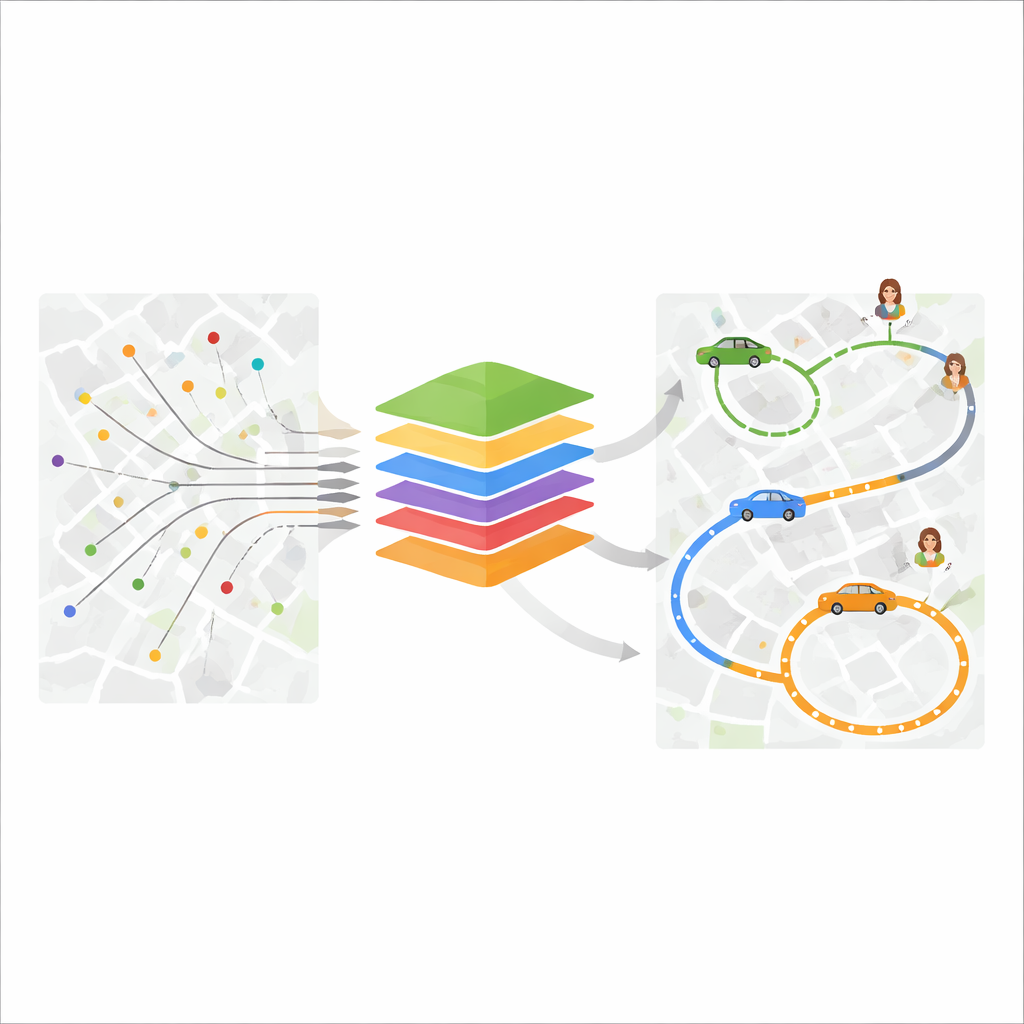
Three ways to let vehicles roam
A striking part of the study is the comparison of three levels of routing freedom. In the most flexible “General” option, vehicles can travel directly between any pair of stops. In the “Sections” option, they can only move along pieces of predefined lines, but may switch between them at crossings. In the most restrictive “Routes” option, each vehicle circles around a single fixed route and passengers transfer between routes when needed. One might expect the loosest version to work best, since it offers more possibilities. Instead, experiments based on the bus network of Rzeszow, Poland, with 64 stops, six vehicles (three electric), and 200 passengers, show the opposite: the fixed‑route option consistently yields the lowest average delay and is also much faster to compute, while the fully free option tends to trap the algorithm in complicated, inefficient route patterns.
Testing delays, loads, and batteries
To see how the model behaves under ideal and messy conditions, the team built two test datasets. In the first, trip requests were chosen so that a perfect, delay‑free plan exists. In the second, requests were random, more like real life, where some lateness is unavoidable. For both, the framework was run in a basic form and in an extended form that includes electric‑vehicle charging and special passenger features. The main success measure was average passenger tardiness, but the authors also tracked the worst delay, how many passengers were late at all, how full vehicles were, and how battery charge changed over time. With the fixed‑route and section‑based options, the system quickly found plans in which average delays were only a few minutes, even when electric‑vehicle constraints and passenger preferences were included. The model also chose when and where to charge the electric vehicles so that battery levels stayed within safe bounds while still serving passengers.
Choosing what to optimize
The study also compares several ways of defining “best.” Minimizing average delay tends to improve the whole system: most passengers arrive earlier and even the most delayed rider is usually no worse off than when other goals are used. Trying to minimize only the worst delay or only the number of late passengers, in contrast, can lead to plans where a few people are extremely late or vehicles are used inefficiently. This suggests that focusing on the typical rider’s experience is a good compromise, and that the same framework can be steered toward different policy goals by changing just one function in the model.
What this means for everyday travel
For non‑experts, the key message is that well‑designed planning tools can make ride‑on‑request services practical at city scale. The paper shows that a single, adaptable framework can assign passengers to vehicles, plan routes, honor special needs, and manage electric batteries, all while keeping average delays low. Perhaps surprisingly, giving vehicles some structure—such as fixed or semi‑fixed routes—often beats letting them roam freely, because it keeps the problem manageable and leads to more reliable service. As cities experiment with new transport ideas, from electric shuttles to app‑based “micro‑transit,” frameworks like this one will be essential to turn scattered trip requests into smooth, shared journeys.
Citation: Bozek, A., Krzeszowski, T. & Sliwa, T. General two-level framework for demand-responsive transport optimization. Sci Rep 16, 14520 (2026). https://doi.org/10.1038/s41598-026-44833-6
Keywords: demand-responsive transport, shared mobility, smart city transit, electric shuttles, route optimization