Clear Sky Science · fr
Cadre général en deux niveaux pour l’optimisation du transport à la demande
Des trajets à la demande plus intelligents
Imaginez commander une navette partagée qui vous prend près de chez vous, vous dépose à proximité du travail ou d’une gare, et recharge tranquillement sa batterie pendant que vous vaquez à vos occupations. Cet article étudie comment planifier de tels services à la demande afin que de nombreuses personnes puissent partager une petite flotte de véhicules, arriver à l’heure et maintenir faibles coûts et émissions. Les auteurs conçoivent et testent une méthode de planification générale qui pourrait aider les villes à dépasser les lignes de bus rigides pour aller vers un transport public plus flexible et plus propre.
Ce que signifie réellement le transport sur demande
Le transport à la demande regroupe des services où les véhicules ne suivent pas d’horaires ni d’itinéraires fixes. Au lieu de cela, les usagers passent des demandes de trajet, souvent via une application, et le système les regroupe en trajets partagés, assigne des véhicules et décide quand et où ces véhicules doivent se rendre. Partout dans le monde, ces services sont expérimentés en banlieue, en zones rurales et comme liaisons « dernier kilomètre » vers les trains et métros. Ils promettent un meilleur accès avec moins de véhicules, mais sont difficiles à exploiter correctement : chaque nouvelle réservation peut modifier qui voyage avec qui, quelles stations sont desservies et si les passagers arrivent à l’heure.
Deux niveaux de réflexion pour chaque trajet
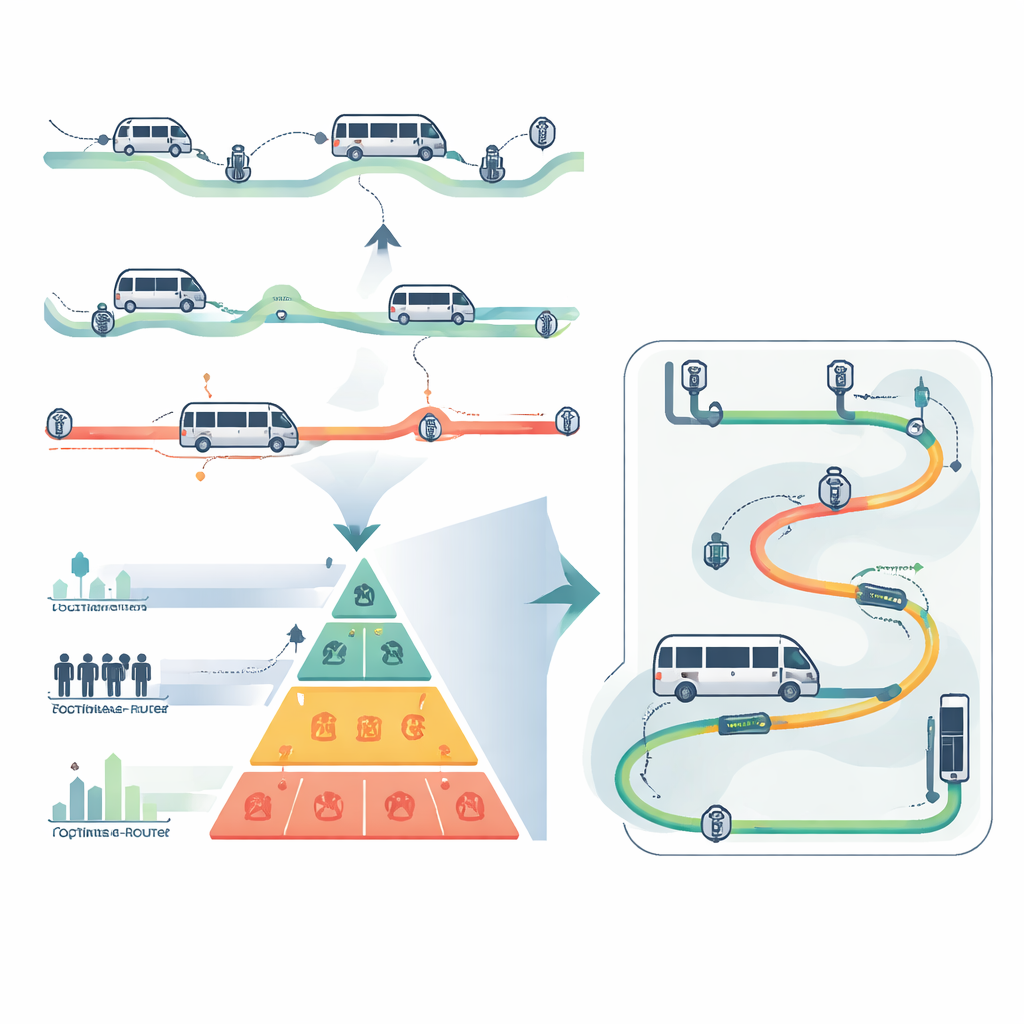
Les auteurs proposent un cadre de planification en deux niveaux qui sépare ce que tout système doit faire de ce que seuls certains systèmes nécessitent. Le premier niveau couvre les bases : assigner chaque passager à un ou plusieurs véhicules, décider de l’ordre de visite des arrêts par les véhicules et vérifier que les limites de capacité et de temps sont respectées. Le second niveau ajoute des éléments pratiques. Il peut tenir compte des véhicules électriques qui doivent être rechargés sans tomber à court de batterie, de segments d’itinéraire partiellement préplanifiés à respecter selon des fenêtres temporelles, et des souhaits individuels des passagers comme l’espace pour fauteuil roulant ou le Wi‑Fi à bord. Parce que ces détails sont maintenus dans une couche séparée, les villes peuvent adapter le même socle à des besoins locaux très différents.
Trois façons de laisser les véhicules circuler
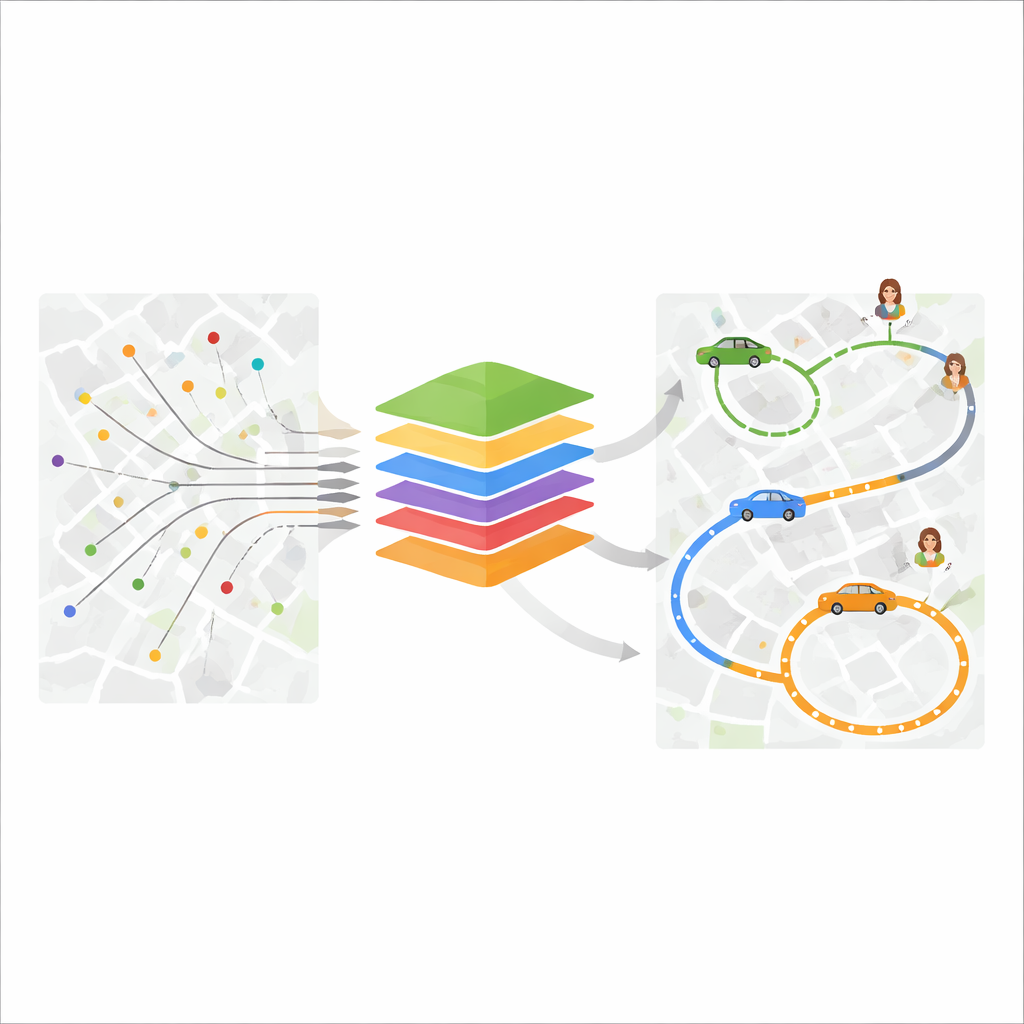
Une partie marquante de l’étude est la comparaison de trois niveaux de liberté de routage. Dans l’option la plus flexible « Général », les véhicules peuvent se déplacer directement entre n’importe quelle paire d’arrêts. Dans l’option « Sections », ils ne peuvent se déplacer que le long de segments de lignes prédéfinies, mais peuvent changer de ligne aux intersections. Dans l’option la plus restrictive « Itinéraires », chaque véhicule circule autour d’un itinéraire fixe et les passagers doivent transférer entre itinéraires si nécessaire. On pourrait s’attendre à ce que la version la plus libre fonctionne le mieux, puisqu’elle offre davantage de possibilités. Au contraire, des expériences basées sur le réseau de bus de Rzeszow, Pologne, avec 64 arrêts, six véhicules (trois électriques) et 200 passagers, montrent l’inverse : l’option à itinéraire fixe donne systématiquement le plus faible retard moyen et est aussi bien plus rapide à calculer, tandis que l’option totalement libre tend à piéger l’algorithme dans des schémas d’itinéraires compliqués et inefficaces.
Tester retards, charges et batteries
Pour examiner le comportement du modèle en conditions idéales et perturbées, l’équipe a construit deux jeux de données de test. Dans le premier, les demandes de trajet ont été choisies de sorte qu’un plan parfait, sans retard, existe. Dans le second, les demandes étaient aléatoires, plus proches de la réalité, où certains retards sont inévitables. Pour les deux jeux, le cadre a été exécuté sous une forme basique et sous une forme étendue incluant la recharge des véhicules électriques et les caractéristiques particulières des passagers. La mesure principale de réussite était le retard moyen des passagers, mais les auteurs ont aussi suivi le pire retard, le nombre de passagers en retard, l’occupation des véhicules et l’évolution de l’état de charge des batteries. Avec les options à itinéraires fixes et basées sur des sections, le système a rapidement trouvé des plans où les retards moyens se comptaient en quelques minutes, même lorsque les contraintes des véhicules électriques et les préférences des passagers étaient incluses. Le modèle a également choisi quand et où recharger les véhicules électriques afin que les niveaux de batterie restent dans des limites sûres tout en continuant à desservir les passagers.
Choisir ce qu’il faut optimiser
L’étude compare aussi plusieurs façons de définir le « meilleur ». Minimiser le retard moyen tend à améliorer l’ensemble du système : la plupart des passagers arrivent plus tôt et même le voyageur le plus retardé n’est généralement pas plus mal loti que lorsque d’autres objectifs sont utilisés. Tenter de minimiser uniquement le pire retard ou uniquement le nombre de passagers en retard, en revanche, peut conduire à des plans où quelques personnes sont extrêmement en retard ou où les véhicules sont utilisés de manière inefficace. Cela suggère que se concentrer sur l’expérience du voyageur type est un bon compromis, et que le même cadre peut être orienté vers différents objectifs de politique en changeant une seule fonction du modèle.
Ce que cela signifie pour les déplacements quotidiens
Pour les non‑spécialistes, le message clé est que des outils de planification bien conçus peuvent rendre les services à la demande pratiques à l’échelle d’une ville. L’article montre qu’un cadre unique et adaptable peut assigner des passagers à des véhicules, planifier des itinéraires, respecter des besoins spéciaux et gérer les batteries électriques, tout en maintenant des retards moyens faibles. De façon peut‑être surprenante, donner une certaine structure aux véhicules — comme des itinéraires fixes ou semi‑fixes — dépasse souvent la liberté totale, parce que cela rend le problème plus gérable et conduit à un service plus fiable. À mesure que les villes expérimentent de nouvelles idées de transport, des navettes électriques aux solutions « micro‑transit » pilotées par application, des cadres comme celui‑ci seront essentiels pour transformer des demandes de trajets éparses en parcours partagés fluides.
Citation: Bozek, A., Krzeszowski, T. & Sliwa, T. General two-level framework for demand-responsive transport optimization. Sci Rep 16, 14520 (2026). https://doi.org/10.1038/s41598-026-44833-6
Mots-clés: transport à la demande, mobilité partagée, transports intelligents en ville, navettes électriques, optimisation d’itinéraire