Clear Sky Science · sv
Tillgänglighet för drönaruppdrag med binärt beslutsdiagram baserat på osäker data
Varför detta är viktigt för verkliga drönaruppdrag
Drönare får i allt högre grad ansvar för allvarliga uppgifter: att kartlägga skogar för brandrisk, kontrollera broar efter sprickor eller flyga över katastrofområden när det är för farligt för människor. Men uppdragsplanerare måste ofta fatta ja/nej-beslut utifrån ofullständig eller oskarp information snarare än hårda statistiska data. Den här artikeln presenterar ett sätt att omvandla den osäkra, expertdrivna kunskapen till klara, numeriska uppskattningar av hur sannolikt ett drönaruppdrag är att lyckas, vilket hjälper operatörer att planera säkrare och mer tillförlitliga insatser.
Från flygplan till en logisk uppdragskarta
Författarna börjar med att betrakta ett drönaruppdrag inte bara som ett enskilt fartyg i luften, utan som ett system bestående av många kontrollpunkter längs rutten. Varje kontrollpunkt representerar en plats där drönaren måste samla användbar data, som bilder av en skogstrygg. Om viktiga kontrollpunkter misslyckas, misslyckas uppdraget, även om drönaren själv håller sig i luften. Denna idé fångas i en ”strukturfunktion” som avbildar kombinationer av lyckade och misslyckade kontrollpunkter till en övergripande bedömning: uppdragslyckande eller uppdragsmisslyckande. Istället för att behöva år av detaljerad statistik kan denna karta byggas från experters uppfattningar om hur avgörande varje kontrollpunkt är och hur bra den insamlade datan tenderar att vara.
Att göra fuzziga expertbedömningar till en skarp modell
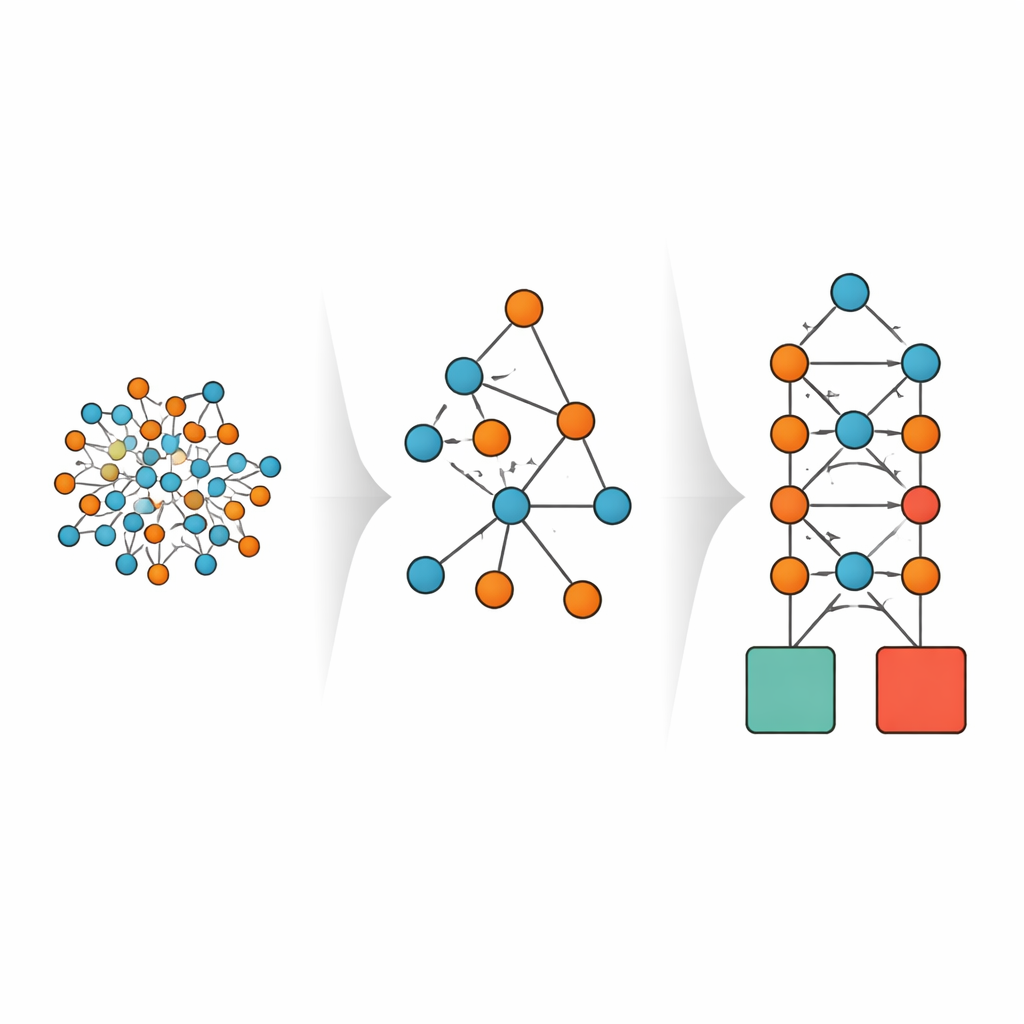
I praktiken är expertbedömningar sällan svartvita. En operatör kan säga att data från en kontrollpunkt troligen är användbar, men med viss osäkerhet. Metoden omfamnar denna oskärpa genom att använda ett fuzzigt beslutsträd. För varje inspelat uppdragsförsök anges av experter konfidensnivåer för att en kontrollpunkt fungerade (värde 1) eller inte (värde 0), och liknande konfidensnivåer för huruvida uppdragsresultatet var användbart. Det fuzziga beslutsträdet lär sig mönster från dessa mjuka, graderade indata, identifierar vilka kontrollpunkter som betyder mest och hur olika kombinationer leder till framgång eller misslyckande. Ett defuzzifieringssteg omvandlar sedan det fuzziga trädet till en skarp, ja-eller-nej-beslutsstruktur lämplig för beräkningar.
Ett kompakt diagram som avslöjar uppdrags svaga punkter
När beslutsträdet är skarpt transformeras det till ett binärt beslutsdiagram, en kompakt graf i flödsstil som kodar alla logiska regler bakom uppdragslyckande. Varje icke-terminal nod representerar en kontrollpunkt, och vägar genom grafen motsvarar olika sätt ett uppdrag kan lyckas eller misslyckas. Eftersom denna representation undviker att upprepa identiska delstrukturer förblir den effektiv även för uppdrag med många kontrollpunkter. Med sannolikheter för varje kontrollpunkts framgång—återigen baserat på expertkonfidens eller begränsade observationer—tillåter diagrammet att uppdragets tillgänglighet, eller sannolikheten för framgång vid en given tidpunkt, beräknas genom att summera sannolikheterna för alla framgångsrika vägar genom grafen.
Övervakning av skogsbrand som fallstudie
För att visa metoden i praktiken analyserar författarna ett drönaruppdrag som övervakar skogsbrandrisk med åtta kontrollpunkter. Istället för alla 256 möjliga kombinationer av kontrollpunktstillstånd fanns endast 150 tillgängliga från expertutvärderingar—lite mer än hälften av hela mängden. Ändå förutsade det resulterande binära beslutsdiagrammet uppdragsutfall med 94 % noggrannhet på ett separat valideringsset. Den beräknade uppdragstillgängligheten var mycket hög (ungefär 0,992), men modellen visade också att den första kontrollpunkten var en ”flaskhals”: om den misslyckades misslyckades uppdraget nästan alltid. Simulerade förbättringar av denna och en annan känslig kontrollpunkt ökade tillgängligheten ytterligare och demonstrerade hur modellen kan vägleda riktade uppgraderingar eller omdesign.
Styrkor, begränsningar och framtida riktningar
Det föreslagna ramverket är kraftfullt eftersom det sammanfogar välkända verktyg—fuzziga beslutsträd och binära beslutsdiagram—till en pipeline som fungerar trots vag, ofullständig data. Det skalar mycket bättre än alternativa maskininlärningsmetoder som skulle kräva att varje möjlig kombination av kontrollpunktstillstånd explicit enumereras, vilket snabbt blir opraktiskt. Samtidigt beror metoden på kvaliteten och konsekvensen i expertbedömningarna, och den fokuserar för närvarande på en statisk bild av uppdrag snarare än tidsvarierande fel eller reparationer. Författarna skisserar framtida arbete för att införliva uppdragets varaktighet, redundans bland flera drönare och mer avancerad riskmedveten beslutsfattning för autonoma luftsystem.
Vad detta betyder för icke-experter
Enkelt uttryckt erbjuder denna studie drönaroperatörer och planerare ett sätt att besvara en enkel men avgörande fråga: ”Givet det vi tror oss veta, hur sannolikt är det att detta uppdrag fungerar?” Även när data är fragmentariska och till stor del baserade på experterfarenhet, ger metoden en transparent, granskbar logisk modell och en konkret sannolikhet för framgång. Den lyfter fram vilka delar av ett uppdrag som förtjänar mest uppmärksamhet, vare sig det innebär att förbättra sensorer vid en specifik kontrollpunkt, justera rutten eller lägga till en andra drönare. När drönare tar på sig större ansvar inom övervakning, inspektion och räddningsinsatser kan sådana verktyg bidra till att deras uppdrag inte bara är ambitiösa utan också påvisbart tillförlitliga.
Citering: Zaitseva, E., Rabcan, J., Levashenko, V. et al. Availability of drone mission with binary decision diagram based on uncertain data. Sci Rep 16, 13721 (2026). https://doi.org/10.1038/s41598-026-42988-w
Nyckelord: drönaruppdrags tillförlitlighet, osäker data, fuzziga beslutsträd, binära beslutsdiagram, övervakning av skogsbrand