Clear Sky Science · pl
Dostępność misji drona z wykorzystaniem binarnego diagramu decyzyjnego opartego na niepewnych danych
Dlaczego to ma znaczenie dla rzeczywistych misji dronów
Drony coraz częściej powierza się poważnym zadaniom: przeglądom lasów pod kątem ryzyka pożarowego, kontrolom mostów pod kątem pęknięć czy lotom nad obszarami objętymi katastrofą, gdy jest zbyt niebezpiecznie dla ludzi. Planiści misji często muszą jednak podejmować decyzje „lecieć/nie lecieć” na podstawie niepełnych lub nieostrych informacji, a nie twardych statystyk. W artykule przedstawiono sposób przekształcenia tej niepewnej, eksperckiej wiedzy w jasne, numeryczne oszacowania prawdopodobieństwa powodzenia misji drona, co pomaga operatorom planować bezpieczniejsze i bardziej niezawodne operacje.
Od trasy lotu do logicznej mapy misji
Autorzy zaczynają od potraktowania misji drona nie tylko jako pojedynczego statku powietrznego w przestrzeni, lecz jako systemu złożonego z wielu punktów kontrolnych wzdłuż trasy. Każdy punkt kontrolny reprezentuje miejsce, w którym dron musi zebrać użyteczne dane, na przykład zdjęcia fragmentu lasu. Jeśli kluczowe punkty kontrolne zawiodą, misja kończy się niepowodzeniem, nawet jeśli sam dron pozostaje w powietrzu. Pomysł ten uchwycono w „funkcji struktury”, która odwzorowuje kombinacje sukcesów i awarii punktów kontrolnych na ogólną ocenę: powodzenie lub niepowodzenie misji. Zamiast wymagać wieloletnich szczegółowych statystyk, tę mapę można zbudować na podstawie opinii ekspertów o tym, jak istotny jest każdy punkt kontrolny i jak zazwyczaj wyglądają zbierane dane.
Przekształcanie rozmytych opinii ekspertów w przejrzysty model
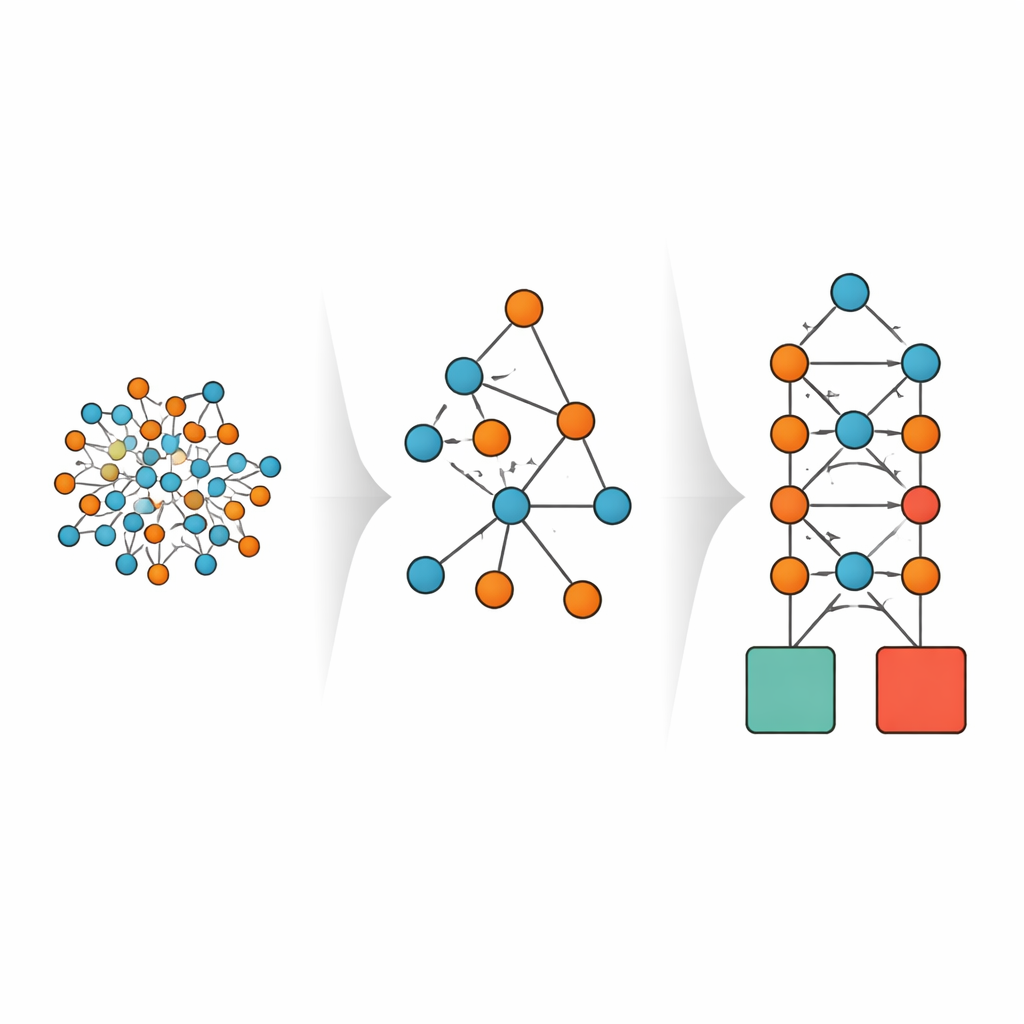
W praktyce oceny ekspertów rzadko są czarno-białe. Operator może stwierdzić, że dane z punktu kontrolnego są prawdopodobnie przydatne, ale z pewną niepewnością. Metoda przyjmuje tę rozmytość, używając rozmytego drzewa decyzyjnego. Dla każdego zanotowanego podejścia do misji eksperci podają poziomy zaufania, że dany punkt kontrolny zadziałał (wartość 1) lub nie (wartość 0), oraz podobne poziomy zaufania co do tego, czy wynik misji był użyteczny. Rozmyte drzewo decyzyjne uczy się wzorców z tych miękkich, stopniowanych danych wejściowych, identyfikując, które punkty kontrolne mają największe znaczenie i jak różne kombinacje prowadzą do sukcesu lub porażki. Krok defuzyfikacji następnie przekształca rozmyte drzewo w ostry, tak/nie strukturę decyzyjną odpowiednią do obliczeń.
Kompaktowy diagram ujawniający słabe punkty misji
Gdy drzewo decyzyjne jest już ostre, przekształca się je w binarny diagram decyzyjny — kompaktowy, przypominający przepływ graf, który koduje wszystkie reguły logiczne stojące za powodzeniem misji. Każdy węzeł niebędący liściem reprezentuje punkt kontrolny, a ścieżki przez graf odpowiadają różnym sposobom, w jakie misja może odnieść sukces lub ponieść porażkę. Ponieważ takie przedstawienie unika powtarzania identycznych podstruktur, pozostaje efektywne nawet dla misji z wieloma punktami kontrolnymi. Mając prawdopodobieństwa sukcesu dla każdego punktu — ponownie oparte na zaufaniu ekspertów lub ograniczonych obserwacjach — diagram umożliwia obliczenie dostępności misji, czyli szansy powodzenia w danym momencie, przez zsumowanie prawdopodobieństw wszystkich ścieżek prowadzących do sukcesu w grafie.
Monitorowanie pożarów lasów jako przypadek testowy
Aby pokazać metodę w praktyce, autorzy przeanalizowali misję drona monitorującą ryzyko pożaru lasu przy użyciu ośmiu punktów kontrolnych. Zamiast wszystkich 256 możliwych kombinacji stanów punktów kontrolnych, dostępnych było tylko 150 ocen eksperckich — nieco ponad połowa pełnego zbioru. Mimo to powstały binarny diagram decyzyjny przewidział wyniki misji z 94% dokładnością na oddzielnym zbiorze walidacyjnym. Obliczona dostępność misji była bardzo wysoka (około 0,992), ale model również ujawnił, że pierwszy punkt kontrolny był „wąskim gardłem”: jeśli zawiódł, misja niemal zawsze kończyła się niepowodzeniem. Symulowane ulepszenia tego i innego wrażliwego punktu jeszcze bardziej podniosły dostępność, pokazując, jak model może wskazywać cele dla ukierunkowanych modernizacji lub przeprojektowań.
Mocne strony, ograniczenia i kierunki rozwoju
Proponowane podejście jest silne, ponieważ łączy powszechnie znane narzędzia — rozmyte drzewa decyzyjne i binarne diagramy decyzyjne — w potoku, który działa pomimo niejasnych, niepełnych danych. Skalowalność rozwiązania jest znacznie lepsza niż alternatywnych metod uczenia maszynowego wymagających jawnego wyliczenia każdej możliwej kombinacji wyników punktów kontrolnych, co szybko staje się niepraktyczne. Jednocześnie metoda zależy od jakości i spójności ocen ekspertów i obecnie koncentruje się na statycznym obrazie misji, a nie na zmiennych w czasie awariach czy naprawach. Autorzy wskazują kierunki przyszłych prac, takie jak uwzględnienie czasu trwania misji, redundancji przy użyciu wielu dronów oraz bardziej zaawansowanego podejścia do podejmowania decyzji uwzględniających ryzyko dla autonomicznych systemów lotniczych.
Co to oznacza dla osób niebędących ekspertami
Mówiąc prosto, badanie oferuje operatorom i planistom dronów sposób odpowiedzi na proste, ale kluczowe pytanie: „Biorąc pod uwagę to, co uważamy za prawdziwe, jak duże jest prawdopodobieństwo powodzenia tej misji?” Nawet gdy dane są fragmentaryczne i w dużej mierze oparte na doświadczeniu ekspertów, metoda generuje przejrzysty, możliwy do zinspekcjonowania model logiczny i konkretne prawdopodobieństwo sukcesu. Wskazuje, które części misji wymagają największej uwagi — czy to poprawy sensorów w konkretnym punkcie kontrolnym, zmiany trasy, czy dodania drugiego drona. W miarę jak drony będą przejmować więcej zadań związanych z monitorowaniem, inspekcjami i reagowaniem kryzysowym, takie narzędzia mogą pomóc zapewnić, że ich misje będą nie tylko ambitne, ale też wykazywalnie niezawodne.
Cytowanie: Zaitseva, E., Rabcan, J., Levashenko, V. et al. Availability of drone mission with binary decision diagram based on uncertain data. Sci Rep 16, 13721 (2026). https://doi.org/10.1038/s41598-026-42988-w
Słowa kluczowe: niezawodność misji drona, niepewne dane, rozmyte drzewa decyzyjne, binarne diagramy decyzyjne, monitorowanie pożarów lasów