Clear Sky Science · it
Disponibilità della missione di drone con diagramma di decisione binaria basato su dati incerti
Perché questo conta nelle missioni reali con i droni
I droni sono sempre più impiegati in compiti critici: sorvegliare le foreste per valutare il rischio di incendi, controllare ponti alla ricerca di crepe o sorvolare zone di disastro quando è troppo pericoloso per le persone. Tuttavia i pianificatori di missione spesso devono prendere decisioni di procedere o meno basate su informazioni incomplete o vaghe anziché su statistiche solide. Questo articolo presenta un modo per trasformare quella conoscenza incerta, spesso basata su esperti, in stime numeriche chiare della probabilità che una missione di drone abbia successo, aiutando gli operatori a pianificare operazioni più sicure e affidabili.
Dal percorso di volo a una mappa logica della missione
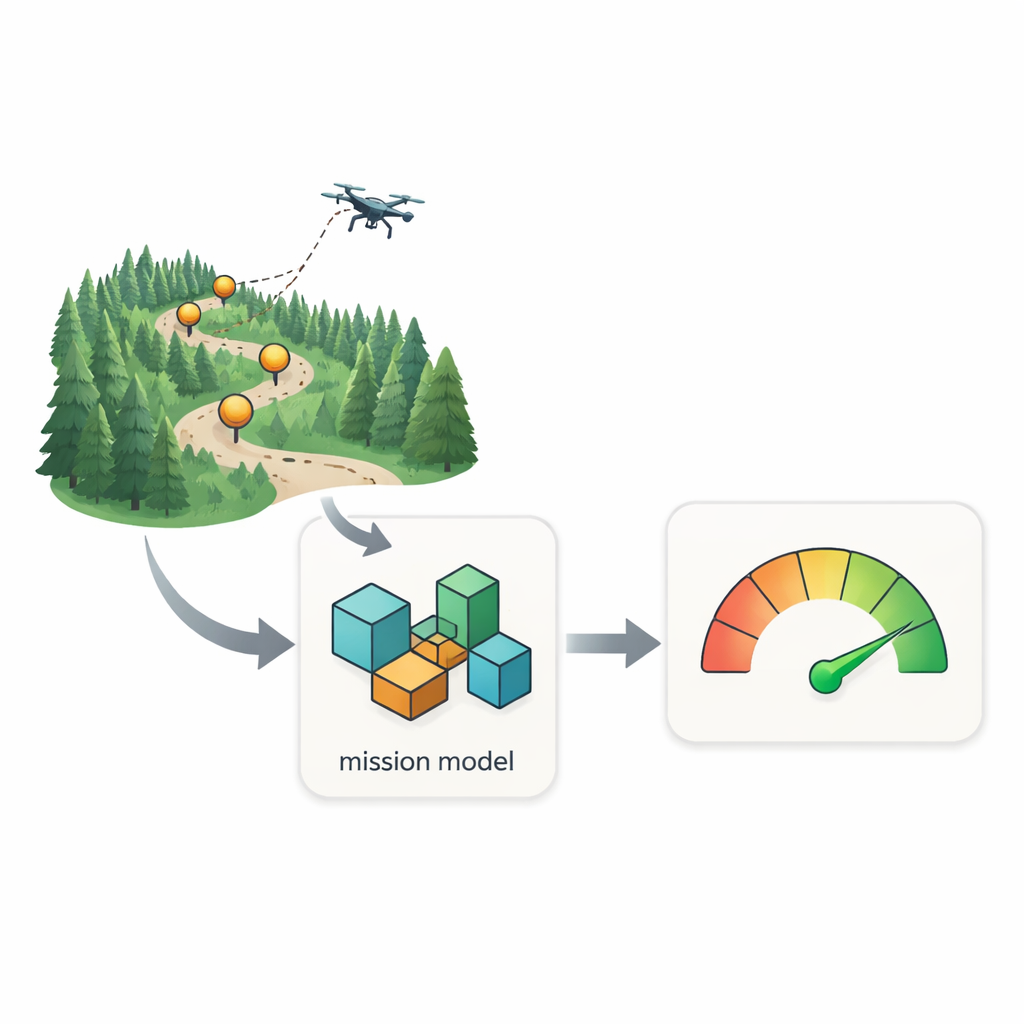
Gli autori iniziano considerando una missione di drone non solo come un singolo velivolo in volo, ma come un sistema composto da molti punti di controllo lungo la rotta. Ogni checkpoint rappresenta un luogo dove il drone deve raccogliere dati utili, per esempio immagini di una porzione di foresta. Se checkpoint chiave falliscono, la missione fallisce, anche se il drone resta in volo. Questa idea è catturata in una “funzione di struttura” che mappa le combinazioni di checkpoint riusciti e falliti in un giudizio complessivo: successo o fallimento della missione. Invece di richiedere anni di statistiche dettagliate, questa mappa può essere costruita dalle opinioni di esperti su quanto sia cruciale ogni checkpoint e sulla qualità tipica dei dati raccolti.
Trasformare opinioni esperte fuzzy in un modello netto
Nella pratica, le valutazioni degli esperti sono raramente in bianco e nero. Un operatore potrebbe dire che i dati di un checkpoint sono probabilmente utilizzabili, ma con una certa incertezza. Il metodo abbraccia questa vaghezza usando un albero decisionale fuzzy. Per ogni tentativo di missione registrato, gli esperti forniscono livelli di confidenza che un checkpoint abbia funzionato (valore 1) o meno (valore 0), e livelli di confidenza analoghi sull’utilità dell’esito della missione. L’albero decisionale fuzzy apprende schemi da questi input morbidi e graduati, identificando quali checkpoint sono più importanti e come diverse combinazioni portano a successo o fallimento. Un passaggio di defuzzificazione converte quindi l’albero fuzzy in una struttura decisionale netta, sì/no, adatta al calcolo.
Un diagramma compatto che rivela i punti deboli della missione
Una volta che l’albero decisionale è reso netto, viene trasformato in un diagramma di decisione binaria, un grafo compatto a flusso che codifica tutte le regole logiche dietro il successo della missione. Ogni nodo non terminale rappresenta un checkpoint, e i percorsi attraverso il grafo corrispondono ai diversi modi in cui una missione può avere successo o fallire. Poiché questa rappresentazione evita di ripetere sottostrutture identiche, rimane efficiente anche per missioni con molti checkpoint. Con le probabilità di successo di ciascun checkpoint — ancora basate sulla confidenza degli esperti o su osservazioni limitate — il diagramma consente di calcolare la disponibilità della missione, ossia la probabilità di successo in un dato momento, sommando le probabilità di tutti i percorsi vincenti attraverso il grafo.
Il monitoraggio degli incendi boschivi come caso di test
Per mostrare il metodo in concreto, gli autori analizzano una missione di drone che monitora il rischio di incendi boschivi usando otto checkpoint. Invece di tutte le 256 possibili combinazioni di stati dei checkpoint, erano disponibili solo 150 valutazioni da esperti — poco più della metà dell’insieme totale. Anche così, il diagramma di decisione binaria risultante ha predetto gli esiti della missione con il 94% di accuratezza su un set di validazione separato. La disponibilità calcolata della missione era molto alta (circa 0,992), ma il modello ha anche rivelato che il primo checkpoint era un “collo di bottiglia”: se falliva, la missione quasi sempre falliva. Miglioramenti simulati a questo e ad un altro checkpoint sensibile hanno aumentato ulteriormente la disponibilità, dimostrando come il modello possa guidare interventi mirati o riprogettazioni.
Punti di forza, limiti e direzioni future
Il framework proposto è potente perché mette insieme strumenti consolidati — alberi decisionali fuzzy e diagrammi di decisione binaria — in una pipeline che funziona nonostante dati vaghi e incompleti. Scala molto meglio rispetto ad approcci alternativi di machine learning che richiederebbero di enumerare esplicitamente ogni possibile combinazione di esiti dei checkpoint, cosa che diventa rapidamente impraticabile. Allo stesso tempo, il metodo dipende dalla qualità e dalla coerenza dei giudizi degli esperti, e si concentra attualmente su una visione statica delle missioni piuttosto che su guasti o riparazioni che variano nel tempo. Gli autori delineano lavori futuri per incorporare la durata della missione, la ridondanza tra più droni e decisioni più avanzate sensibili al rischio per sistemi aerospaziali autonomi.
Cosa significa per i non esperti
In termini semplici, questo studio offre agli operatori e ai pianificatori di droni un modo per rispondere a una domanda semplice ma cruciale: “Dato ciò che pensiamo di sapere, quanto è probabile che questa missione funzioni?” Anche quando i dati sono frammentari e basati in gran parte sull’esperienza di esperti, il metodo produce un modello logico trasparente e ispezionabile e una probabilità concreta di successo. Evidenzia quali parti di una missione meritano maggiore attenzione, che si tratti di migliorare i sensori in un checkpoint specifico, modificare la rotta o aggiungere un secondo drone. Man mano che i droni assumono maggiori responsabilità nel monitoraggio, nelle ispezioni e nelle risposte di emergenza, strumenti del genere possono aiutare a garantire che le loro missioni siano non solo ambiziose ma anche dimostrabilmente affidabili.
Citazione: Zaitseva, E., Rabcan, J., Levashenko, V. et al. Availability of drone mission with binary decision diagram based on uncertain data. Sci Rep 16, 13721 (2026). https://doi.org/10.1038/s41598-026-42988-w
Parole chiave: affidabilità missione drone, dati incerti, alberi decisionali fuzzy, diagrammi di decisione binaria, monitoraggio incendi boschivi