Clear Sky Science · ar
توفر مهمة طائرة بدون طيار باستخدام مخطط القرار الثنائي مبني على بيانات غير مؤكدة
لماذا هذا ذو أهمية لمهمات الطائرات بدون طيار في العالم الحقيقي
تُوثق الطائرات بدون طيار بدرجة متزايدة للقيام بمهام جدّية: مسح الغابات بحثًا عن مخاطر الحريق، فحص جسور للبحث عن تشققات، أو التحليق فوق مناطق الكوارث عندما يكون دخول البشر خطيرًا. لكن مخططي المهمات غالبًا ما يضطرون لاتخاذ قرارات الاستمرار/الإلغاء بناءً على معلومات ناقصة أو ضبابية بدلاً من إحصاءات صارمة. تعرض هذه الورقة طريقة لتحويل تلك المعرفة غير المؤكدة والمستندة إلى خبراء إلى تقديرات رقمية واضحة لاحتمال نجاح مهمة الطائرة بدون طيار، مما يساعد المشغلين على تخطيط عمليات أكثر أمانًا وموثوقية.
من مسار الطيران إلى خريطة منطقية للمهمة
يبدأ المؤلفون بمعاملة مهمة الطائرة بدون طيار ليس كطائرة واحدة في السماء فحسب، بل كنظام مكوَّن من العديد من نقاط التفتيش على طول مسارها. تمثل كل نقطة تفتيش مكانًا يجب أن تجمع فيه الطائرة بيانات مفيدة، مثل صور لقطعة من الغابة. إذا فشلت نقاط تفتيش رئيسية، تفشل المهمة حتى لو بقيت الطائرة في الجو. تُلتقط هذه الفكرة في «دالة البنية» التي تربط تراكيب نجاح وفشل نقاط التفتيش بحكم عام: نجاح المهمة أو فشلها. بدلاً من الحاجة لسنوات من الإحصاءات التفصيلية، يمكن بناء هذه الخريطة اعتمادًا على آراء الخبراء حول مدى أهمية كل نقطة تفتيش وجودة البيانات المجمعة عادة.
تحويل آراء الخبراء الضبابية إلى نموذج حاسم
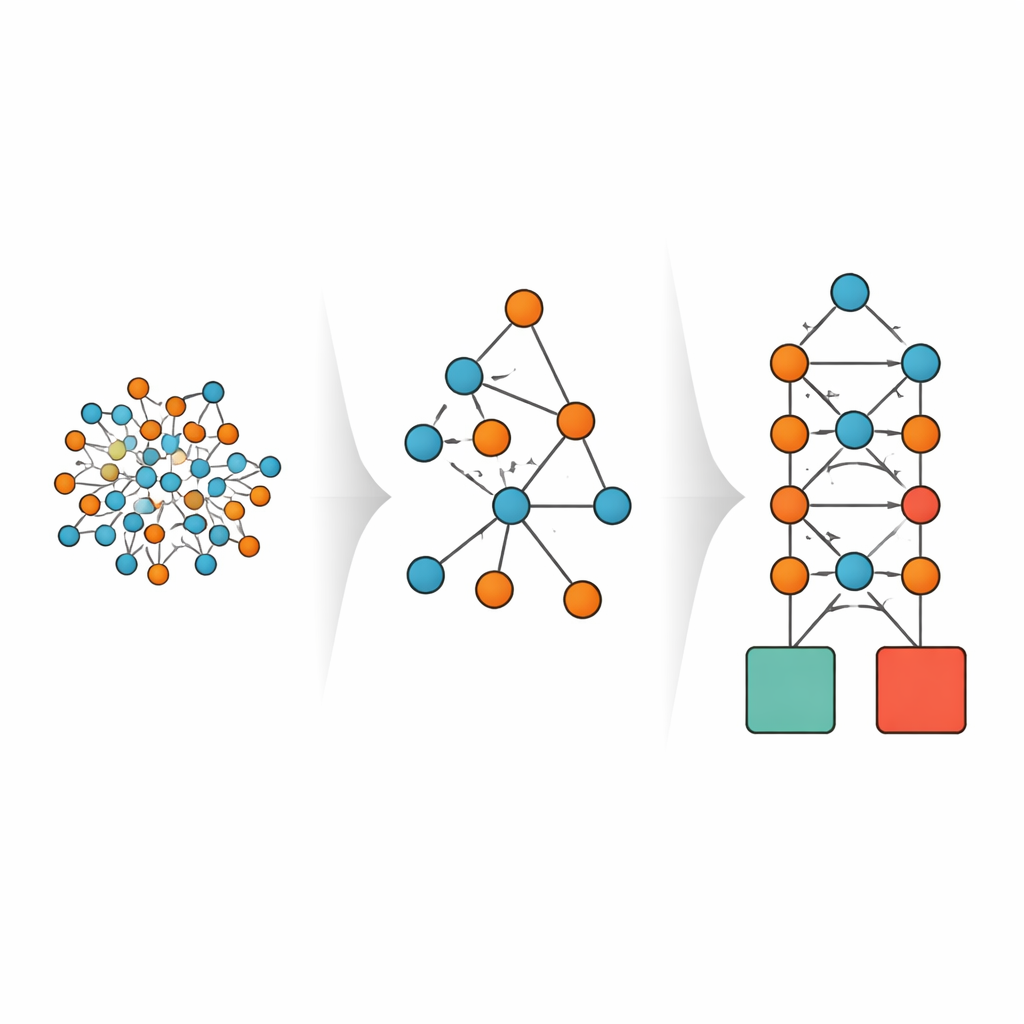
في الواقع العملي، نادرًا ما تكون تقييمات الخبراء أبيض وأسود. قد يقول المشغل إن بيانات نقطة تفتيش محتملة أن تكون قابلة للاستخدام، لكن مع بعض الشك. تتبنى الطريقة هذه الضبابية باستخدام شجرة قرار ضبابية. لكل محاولة مهمة مسجلة، يقدم الخبراء مستويات ثقة بأن نقطة التفتيش عملت (القيمة 1) أو لم تعمل (القيمة 0)، ومماثلة لمستويات الثقة فيما إذا كانت نتيجة المهمة مفيدة. تتعلم شجرة القرار الضبابية أنماطًا من هذه المدخلات الناعمة والدرجات، محددةً أي نقاط التفتيش أكثر أهمية وكيف تقود التركيبات المختلفة إلى النجاح أو الفشل. ثم تحول خطوة إزالة الضباب الشجرة إلى هيكل قرار حاسم بنعم/لا مناسب للحساب.
مخطط مضغوط يكشف نقاط الضعف في المهمة
عند أن تصبح شجرة القرار حاسمة، تُحوَّل إلى مخطط قرار ثنائي، رسم بياني مضغوط يشبه التدفق ويرمز لكل القواعد المنطقية وراء نجاح المهمة. يمثل كل عقدة غير نهائية نقطة تفتيش، والمسارات عبر الرسم تمثل الطرق المختلفة التي يمكن أن تنجح أو تفشل بها المهمة. وبما أن هذا التمثيل يتجنب تكرار البنى الفرعية المتطابقة، يظل فعالًا حتى للمهمات التي تحتوي على العديد من نقاط التفتيش. مع احتمالات نجاح كل نقطة تفتيش — مرة أخرى بناء على ثقة الخبراء أو ملاحظات محدودة — يسمح المخطط بحساب توفر المهمة، أو فرصة النجاح في لحظة معينة، بجمع احتمالات جميع المسارات الناجحة عبر الرسم.
مراقبة حرائق الغابات كحالة اختبار
لإظهار الطريقة قيد التطبيق، يحلل المؤلفون مهمة طائرة بدون طيار ترصد مخاطر حرائق الغابات باستخدام ثماني نقاط تفتيش. بدلاً من جميع التراكيب المحتملة البالغ عددها 256 لحالات نقاط التفتيش، توفرت فقط 150 نتيجة من تقييمات الخبراء — أي أكثر قليلًا من نصف المجموع الكامل. ومع ذلك، تنبأ مخطط القرار الثنائي الناتج بنتائج المهمة بدقة 94% على مجموعة تحقق منفصلة. كان توفر المهمة المحسوب مرتفعًا جدًا (حوالي 0.992)، لكن النموذج كشف أيضًا أن نقطة التفتيش الأولى كانت «عنق زجاجة»: إذا فشلت، تفشل المهمة تقريبًا دائمًا. أدت محاكاة تحسينات على هذه النقطة ونقطة حساسة أخرى إلى رفع التوفر أكثر، مما يوضح كيف يمكن للنموذج أن يوجّه تحسينات مستهدفة أو إعادة تصميم.
نقاط القوة والقيود والاتجاهات المستقبلية
الإطار المقترح قوي لأنه يجمع أدوات معروفة جيدًا — أشجار قرار ضبابية ومخططات القرار الثنائية — في سلسلة أدوات تعمل رغم البيانات الغامضة وغير المكتملة. يتوسع هذا النهج بشكل أفضل بكثير من البدائل في التعلم الآلي التي ستتطلب تعدادًا صريحًا لكل تركيبة ممكنة لنتائج نقاط التفتيش، وهو ما يصبح عمليًا بسرعة. وفي الوقت نفسه، تعتمد الطريقة على جودة واتساق أحكام الخبراء، وتركز حاليًا على نظرة ثابتة للمهمات بدلاً من فشل أو إصلاحات متغيرة عبر الزمن. يستعرض المؤلفون أعمالًا مستقبلية لدمج مدة المهمة، والاحتياط بين طائرات متعددة، وصنع قرارات أكثر وعيًا بالمخاطر للأنظمة الجوية الذاتية.
ماذا يعني هذا لغير المتخصصين
بعبارة بسيطة، يقدم هذا البحث لمشغلي ومخططي الطائرات بدون طيار طريقة للإجابة عن سؤال بسيط لكنه حاسم: «بناءً على ما نعتقد أننا نعرفه، ما احتمال نجاح هذه المهمة؟» حتى عندما تكون البيانات متقطعة ومعتمدة إلى حد كبير على خبرة الخبراء، تنتج الطريقة نموذجًا منطقيًا شفافًا قابلًا للتدقيق واحتمال نجاح ملموس. يبرز النموذج الأجزاء التي تستحق أكبر قدر من الاهتمام في المهمة، سواء كان ذلك تحسين أجهزة الاستشعار عند نقطة تفتيش محددة، ضبط المسار، أو إضافة طائرة ثانية. مع تحمل الطائرات بدون طيار مسؤوليات أكبر في المراقبة والفحص والاستجابة للطوارئ، يمكن لمثل هذه الأدوات أن تساعد في ضمان أن مهامها ليست طموحة فحسب، بل أيضًا موثوقة بشكل واضح.
الاستشهاد: Zaitseva, E., Rabcan, J., Levashenko, V. et al. Availability of drone mission with binary decision diagram based on uncertain data. Sci Rep 16, 13721 (2026). https://doi.org/10.1038/s41598-026-42988-w
الكلمات المفتاحية: موثوقية مهمة الطائرة بدون طيار, بيانات غير مؤكدة, أشجار قرار ضبابية, مخططات القرار الثنائية, مراقبة حرائق الغابات