Clear Sky Science · ru
Семантическая сегментация светлых жил на мультимодальных данных ChemCam
Скрытые подсказки в марсианских породах
А что если мы могли бы прочесть водное прошлое Марса прямо по крошечным трещинам в его породах? Это исследование показывает, как учёные обучают компьютеры обнаруживать светлые минерализованные жилы на снимках, сделанных роверoм Curiosity. Эти светлые полосы — признак того, что вода когда-то циркулировала в породах. Автоматизируя их обнаружение, исследователи могут просканировать тысячи изображений ровера гораздо быстрее, чем любая команда людей, уточняя картину, когда и где на Марсе могли существовать благоприятные для жизни условия.
Почему светлые жилы важны для поиска жизни на Марсе
Curiosity изучает кратер Гейла с 2012 года, используя прибор ChemCam для съёмки пород крупным планом и для лазерного зондажа их химии. Многие породы вдоль маршрута ровера содержат бледные жилы — трещины, заполненные минералами, которые, вероятно, образовались при циркуляции богатых водой растворов в коре. Спектры ChemCam показывают, что эти жилы часто богаты сульфатами кальция — минералами, которые обычно образуются при испарении воды. Поскольку жидкая вода — ключевой ингредиент для жизни, детальная карта таких жил помогает реконструировать, где на Марсе когда-то долгое время текла и скапливалась вода.
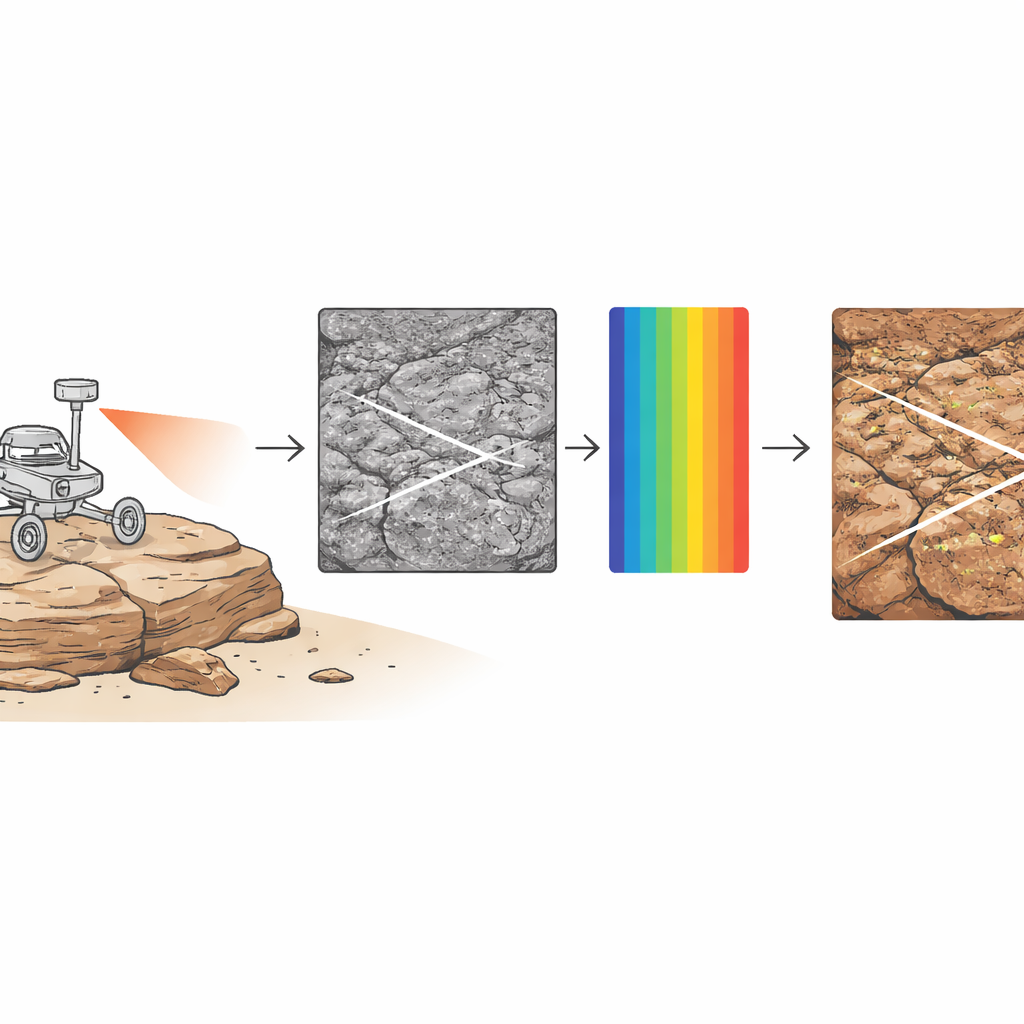
Как изображения и лазерные вспышки превращаются в данные
ChemCam даёт два типа информации о каждой цели. Во‑первых, его камера Remote Micro Imager делает чёткие чёрно‑белые снимки с субмиллиметровым разрешением, показывая текстуры и мелкие трещины. Во‑вторых, его система лазерной индукции плазмы (LIBS) выстреливает лазером в несколько точек на породе, создавая маленькую светящуюся плазму, цвета которой раскрывают присутствующие элементы. По этим LIBS‑измерениям учёные вычисляют содержание оксида кальция в каждой точке. Высокие уровни кальция, выше примерно 10 вес.% часто — но не всегда — совпадают со светлыми жилками на изображениях, давая химическую подсказку о возможном местоположении этих структур.
Обучение алгоритма отслеживать трещины
Ручная разметка каждой жилы по пикселям в тысячах изображений утомительна и непоследовательна, поэтому команда создала специализированный тренировочный набор. Они опирались на предыдущую работу, которая группировала изображения ChemCam по классам текстур, и отобрали около 480 сцен с вероятными жилами. Из них эксперты выбрали 55 ясных примеров и тщательно нарисовали бинарные маски, обозначив, какие пиксели принадлежат жиле. Они также превратили данные LIBS по кальцию в простые изображения: светлые квадраты там, где лазер зафиксировал высокое содержание кальция, тёмные — где его не было, и серые — где измерений не проводилось. Разрезая каждое большое изображение на более мелкие плитки и применяя отражения, повороты и масштабирование, они расширили этот небольшой размеченный набор до сотен обучающих образцов.
Как работает интеллектуальный детектор жил
В основе подхода — семейство моделей глубокого обучения на базе U‑Net, архитектуры сегментации изображений, изначально разработанной для медицинских снимков. Модель принимает на вход изображения ChemCam и предсказывает для каждого пикселя, принадлежит ли он жиле. Исследователи тестировали несколько вариантов: простые U‑Net, обученные только на изображениях; версии, инициализированные сетями, предварительно натренированными на больших земных наборах изображений; и модели, которые включали информацию LIBS либо как дополнительные каналы изображения, либо через функцию потерь, направляющую обучение. Лучшей оказалась предварительно обученная U‑Net, чья функция потерь мягко штрафовала предсказания, противоречащие кальциевым LIBS‑данным в точках лазера, что направляло сеть к химически правдоподобным картам жил. Эта модель достигла примерно 80% среднего пересечения по объединению (mean IoU) и почти 89% F1‑оценки — сильный результат для столь тонкой задачи.
Построение надёжных карт для научной интерпретации ровера
Поскольку эти предсказания будут направлять научные выводы, команда также решила тонкий вопрос: насколько можно доверять каждой карте? Они применили статистический метод Learn‑Then‑Test, чтобы скорректировать пороги выхода модели после обучения, не меняя её весов. Настраивая эти пороги на калибровочном наборе, они гарантировали, что общий уровень ложных срабатываний — вероятность того, что предсказанный пиксель жилы на самом деле ошибочен — остаётся ниже примерно 10%. Эта пост‑обработка сократила число ложных обнаружений ценой пропуска некоторых реальных жил, предпочтение было отдано снижению ложных тревог в пользу большей уверенности в помеченных жилках.
Что это значит для изучения Марса
Проще говоря, исследование даёт автоматизированный, химически осведомлённый «трекер жил» для архива изображений Curiosity, с настройками, позволяющими регулировать осторожность в объявлении объекта жилой. С его помощью исследователи могут быстро просканировать весь маршрут ровера, отследить, как меняется плотность и толщина жил от места к месту, и соотнести эти закономерности с химическим составом пород. Эти закономерности, в свою очередь, уточняют нашу картину того, когда вода циркулировала в породах кратера Гейла и как долго на Марсе могли сохраняться условия, пригодные для жизни. Тот же подход в будущем можно расширить на другие структурные признаки пород и инструменты, помогая следующим роверам превращать огромные коллекции изображений в надёжные, готовые к картированию подсказки о планетной истории.
Цитирование: Lomashvili, A., Rammelkamp, K., Bhattacharjee, P. et al. Semantic segmentation of light-toned veins in multimodal ChemCam data. Sci Rep 16, 12052 (2026). https://doi.org/10.1038/s41598-026-47207-0
Ключевые слова: Обитаемость Марса, роувер Curiosity, изображения ChemCam, глубокая сегментация, сульфатные жилы кальция