Clear Sky Science · fr
Segmentation sémantique des veines de teinte claire dans les données multimodales de ChemCam
Indices cachés dans les roches martiennes
Et si nous pouvions lire le passé aquatique de Mars directement à partir de fines fissures dans ses roches ? Cette étude montre comment des scientifiques apprennent aux ordinateurs à repérer des veines minérales claires dans les images prises par le rover Curiosity de la NASA. Ces stries lumineuses indiquent que de l’eau a autrefois circulé dans les roches. En automatisant leur détection, les chercheurs peuvent examiner des milliers d’images du rover beaucoup plus rapidement que n’importe quelle équipe humaine, affinant ainsi notre vision de quand et où Mars a pu être habitable.
Pourquoi les veines claires comptent pour la vie sur Mars
Curiosity arpente le cratère Gale depuis 2012, utilisant un instrument appelé ChemCam pour photographier les roches de près et les soumettre à un laser afin d’en mesurer la chimie. De nombreuses roches sur le trajet du rover présentent des veines pâles — des fractures remplies de minéraux qui se sont probablement formés par des fluides riches en eau circulant dans la croûte. Les spectres de ChemCam montrent que ces veines sont souvent riches en sulfates de calcium, des minéraux qui se forment typiquement lors de l’évaporation de l’eau. Parce que l’eau liquide est un ingrédient clé pour la vie, cartographier ces veines en détail aide les scientifiques à reconstituer où des eaux durables ont autrefois circulé et stagné sur Mars.
Transformer images et éclairs laser en données
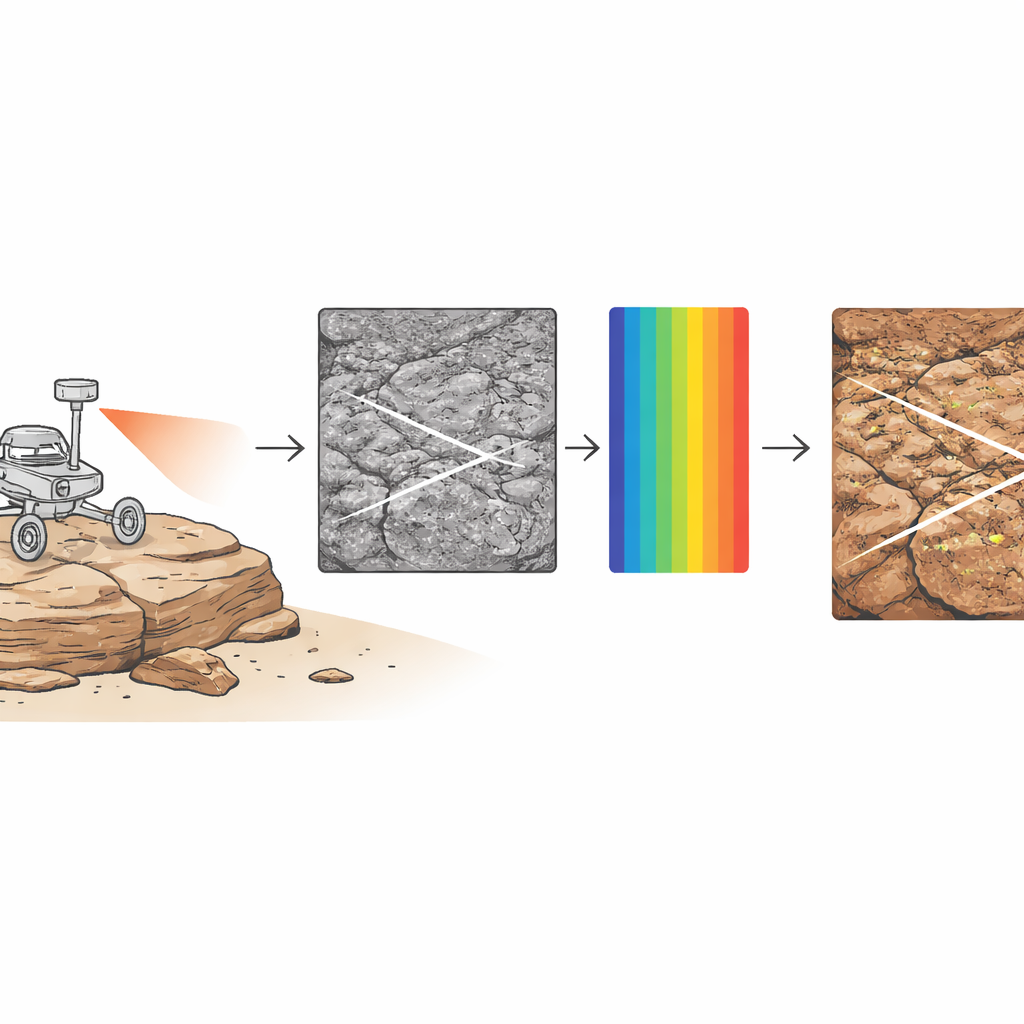
ChemCam fournit deux types d’informations pour chaque roche ciblée. D’abord, sa caméra, le Remote Micro Imager, prend des images nettes en niveaux de gris à résolution submillimétrique, montrant textures et fissures fines. Ensuite, son système de spectroscopie par émission induite au laser (LIBS) tire un laser en plusieurs points de la roche, créant un minuscule plasma lumineux dont les couleurs révèlent les éléments présents. À partir de ces mesures LIBS, les scientifiques calculent la teneur en oxyde de calcium à chaque point. Des niveaux élevés de calcium, au-delà d’environ 10 % en masse, correspondent souvent — mais pas toujours — à des veines de teinte claire dans les images, fournissant un indice chimique des endroits où ces structures peuvent se cacher.
Apprendre à un algorithme à suivre les fissures
Tracer manuellement chaque veine, pixel par pixel, dans des milliers d’images est fastidieux et incohérent, aussi l’équipe a construit un jeu d’entraînement spécialisé. Ils sont partis de travaux antérieurs qui avaient groupé les images ChemCam en classes de texture et ont extrait environ 480 scènes susceptibles de contenir des veines. Parmi celles-ci, des experts ont sélectionné 55 exemples clairs et ont dessiné avec soin des masques binaires indiquant quels pixels appartenaient aux veines. Ils ont aussi transformé les données LIBS de calcium en images simples : carrés lumineux là où le laser mesurait un calcium élevé, carrés sombres là où ce n’était pas le cas, et gris là où aucune mesure n’existait. En découpant chaque grande image en tuiles plus petites et en appliquant des retournements, rotations et zooms, ils ont étendu ce petit jeu étiqueté en centaines d’échantillons d’entraînement.
Comment fonctionne le détecteur de veines intelligent
Le cœur de l’approche est une famille de modèles d’apprentissage profond basés sur U-Net, une architecture de segmentation d’images développée à l’origine pour l’imagerie médicale. Le modèle prend en entrée les images de roches ChemCam et prédit, pour chaque pixel, s’il appartient à une veine. Les chercheurs ont testé plusieurs variantes : des U-Net simples entraînés uniquement sur les images, des versions initialisées par des réseaux pré-entraînés sur de larges jeux d’images terrestres, et des modèles intégrant l’information LIBS soit comme canaux d’image supplémentaires, soit via la fonction de perte guidant l’apprentissage. Leur meilleur modèle était un U-Net pré-entraîné dont la fonction de perte pénalisait légèrement les prédictions en désaccord avec les images LIBS basées sur le calcium aux points du laser, orientant le réseau vers des cartes de veines chimiquement plausibles. Ce modèle a obtenu environ 80 % d’intersection moyenne sur l’union (IoU) et près de 89 % de score F1 — une performance solide pour une tâche aussi fine.
Construire des cartes fiables pour la science des rovers
Parce que ces prédictions guideront l’interprétation scientifique, l’équipe a aussi abordé une question subtile : jusqu’à quel point peut-on faire confiance à chaque carte ? Ils ont adopté une méthode statistique appelée Learn-Then-Test pour ajuster les seuils de sortie du modèle après l’entraînement, sans modifier ses poids. En réglant ces seuils sur un jeu de calibration, ils ont garanti que le taux global de fausses découvertes — la probabilité qu’un pixel prédit comme veine soit en réalité erroné — restait en dessous d’environ 10 %. Ce post-traitement a réduit les détections erronées au prix de la non-détection de certaines veines réelles, sacrifiant le rappel au profit d’une confiance accrue dans ce qui est étiqueté comme veine.
Ce que cela signifie pour l’exploration de Mars
En termes simples, l’étude fournit un « traceur de veines » automatisé et sensible à la chimie pour les archives d’images de Curiosity, assorti de réglages permettant de contrôler son degré de prudence pour identifier une veine. Avec cet outil, les chercheurs peuvent rapidement parcourir l’ensemble du trajet du rover, suivre comment l’abondance et l’épaisseur des veines varient d’un lieu à l’autre, et relier ces motifs à la composition chimique des roches. Ces motifs, à leur tour, affinent notre récit sur quand l’eau a circulé dans les roches du cratère Gale et combien de temps les conditions habitables ont pu persister sur Mars. La même approche pourrait à terme être étendue à d’autres structures rocheuses et instruments, aidant les futurs rovers à transformer de vastes collections d’images en indices cartographiables et fiables sur l’histoire planétaire.
Citation: Lomashvili, A., Rammelkamp, K., Bhattacharjee, P. et al. Semantic segmentation of light-toned veins in multimodal ChemCam data. Sci Rep 16, 12052 (2026). https://doi.org/10.1038/s41598-026-47207-0
Mots-clés: Habitabilité de Mars, Rover Curiosity, Imagerie ChemCam, Segmentation par apprentissage profond, Veines de sulfate de calcium