Clear Sky Science · es
Segmentación semántica de venas de tono claro en datos multimodales de ChemCam
Pistas ocultas en las rocas marcianas
¿Y si pudiéramos leer el pasado acuoso de Marte directamente a partir de pequeñas grietas en sus rocas? Este estudio muestra cómo los científicos enseñan a los ordenadores a detectar venas brillantes llenas de minerales en imágenes tomadas por el rover Curiosity de la NASA. Estas franjas claras señalan que el agua una vez circuló por las rocas. Al automatizar su detección, los investigadores pueden revisar miles de imágenes del rover mucho más rápido que cualquier equipo humano, afinando nuestro conocimiento sobre cuándo y dónde Marte pudo haber sido habitable.
Por qué las venas claras importan para la vida en Marte
Curiosity recorre el cráter Gale desde 2012, usando un instrumento llamado ChemCam tanto para fotografiar las rocas de cerca como para incidirlas con un láser y medir su química. Muchas rocas a lo largo de la trayectoria del rover muestran venas pálidas: fracturas rellenas de minerales que probablemente se formaron por fluidos ricos en agua que circularon por la corteza. Los espectros de ChemCam revelan que estas venas suelen ser ricas en sulfatos de calcio, minerales que típicamente se forman cuando el agua se evapora. Dado que el agua líquida es un ingrediente clave para la vida, cartografiar estas venas con detalle ayuda a los científicos a reconstruir dónde el agua persistió y se acumuló en Marte.
Convertir fotos y destellos láser en datos
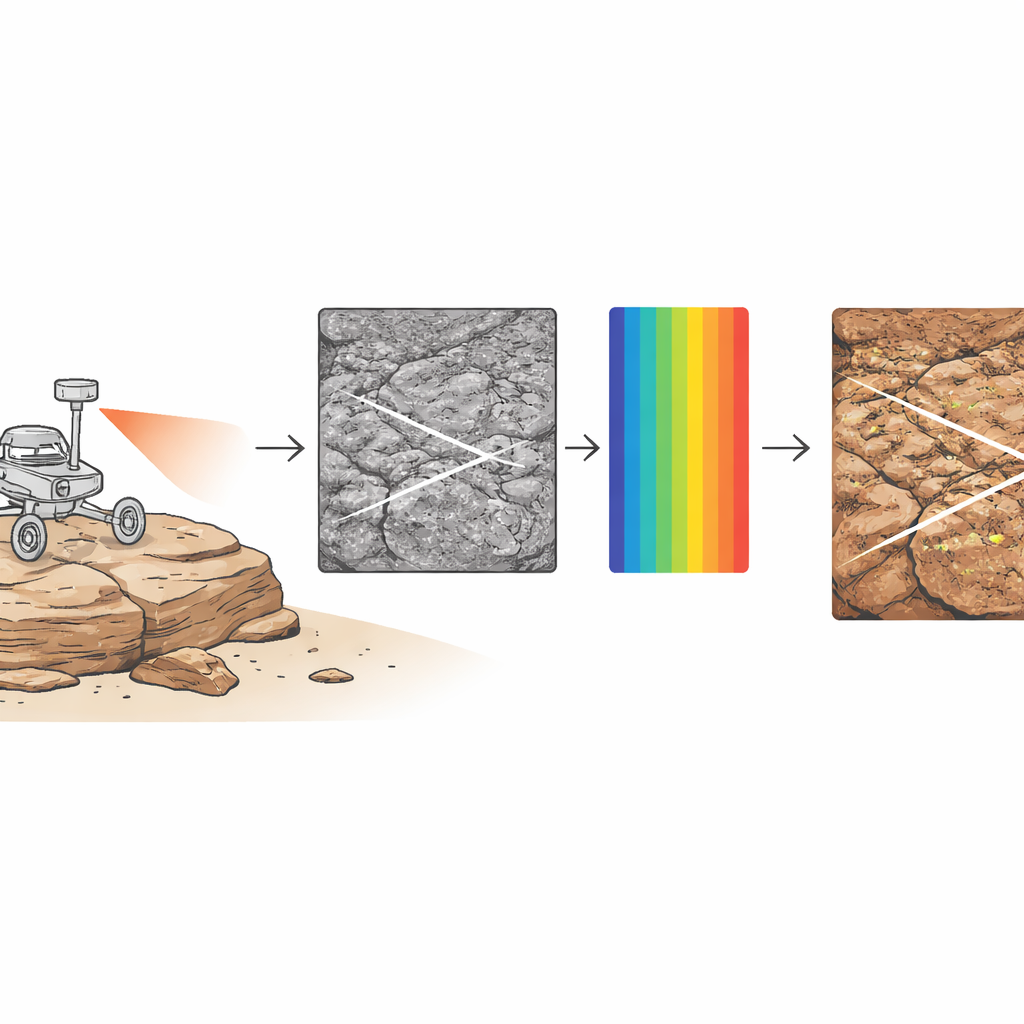
ChemCam proporciona dos tipos de información sobre cada objetivo rocoso. Primero, su cámara, el Remote Micro Imager, toma imágenes nítidas en escala de grises con resolución submilimétrica, mostrando texturas y grietas finas. Segundo, su sistema de espectroscopía por plasma inducido por láser (LIBS) dispara un láser en varios puntos de la roca, creando un pequeño plasma incandescente cuyas emisiones revelan los elementos presentes. A partir de estas mediciones LIBS, los científicos calculan cuánto óxido de calcio hay en cada punto. Niveles altos de calcio, por encima de aproximadamente 10% en peso, con frecuencia —aunque no siempre— coinciden con venas de tono claro en las imágenes, proporcionando una pista química sobre dónde pueden ocultarse estas características.
Enseñar a un algoritmo a trazar las grietas
Trazar manualmente cada vena, píxel por píxel, en miles de imágenes es tedioso e inconsistente, por lo que el equipo creó un conjunto de entrenamiento especializado. Partieron de trabajos anteriores que agruparon imágenes de ChemCam en clases de textura y extrajeron alrededor de 480 escenas con probables venas. De estas, los expertos seleccionaron 55 ejemplos claros y dibujaron con gran cuidado máscaras binarias que marcaban qué píxeles pertenecían a venas. También convirtieron los datos de calcio de LIBS en imágenes simples: cuadros brillantes donde el láser midió calcio alto, cuadros oscuros donde no lo midió y grises donde no había mediciones. Cortando cada imagen grande en mosaicos más pequeños y aplicando volteos, rotaciones y zooms, ampliaron este pequeño conjunto etiquetado hasta obtener cientos de muestras de entrenamiento.
Cómo funciona el buscador inteligente de venas
El núcleo del enfoque es una familia de modelos de aprendizaje profundo basados en U-Net, una arquitectura de segmentación de imágenes desarrollada originalmente para exploraciones médicas. El modelo toma como entrada las imágenes de las rocas de ChemCam y predice, para cada píxel, si pertenece a una vena. Los investigadores probaron varias variantes: U-Nets simples entrenados solo con imágenes, versiones que partían de redes preentrenadas en grandes conjuntos de imágenes terrestres, y modelos que incorporaban la información LIBS ya sea como canales de imagen adicionales o a través de la función de pérdida que guía el aprendizaje. El mejor rendimiento lo obtuvo un U-Net preentrenado cuya función de pérdida penalizaba suavemente las predicciones que discrepaban con las imágenes basadas en el calcio de LIBS en los puntos del láser, orientando la red hacia mapas de venas químicamente plausibles. Este modelo alcanzó alrededor del 80% de intersección sobre unión media (IoU) y casi un 89% en la puntuación F1 —un rendimiento notable para una tarea de tan alta resolución.
Construir mapas fiables para la ciencia del rover
Dado que estas predicciones guiarán la interpretación científica, el equipo también abordó una cuestión sutil: ¿cuánto podemos confiar en cada mapa? Adoptaron un método estadístico llamado Learn-Then-Test para ajustar los umbrales de salida del modelo después del entrenamiento, sin cambiar sus pesos. Al afinar estos umbrales en un conjunto de calibración, garantizaron que la tasa global de descubrimientos falsos —la probabilidad de que un píxel predicho como vena esté realmente equivocado— se mantuviera por debajo de aproximadamente el 10%. Este posprocesado redujo las detecciones espurias a costa de perder algunas venas reales, sacrificando recall a favor de una mayor confianza en lo que se etiqueta como vena.
Qué significa esto para la exploración de Marte
En términos sencillos, el estudio entrega un "trazador de venas" automatizado y sensible a la química para el archivo de imágenes de Curiosity, completo con controles para ajustar cuán conservador es al identificar una vena. Con él, los investigadores pueden inspeccionar rápidamente todo el recorrido del rover, seguir cómo cambian la abundancia y el espesor de las venas de un lugar a otro, y relacionar esos patrones con la composición química de las rocas. Esos patrones, a su vez, refinan nuestra historia sobre cuándo el agua circuló por las rocas del cráter Gale y cuánto tiempo pudieron mantenerse condiciones habitables en Marte. El mismo enfoque podría ampliarse eventualmente a otras características rocosas e instrumentos, ayudando a futuros rovers a convertir vastas colecciones de imágenes en pistas fiables y listas para mapas sobre la historia planetaria.
Cita: Lomashvili, A., Rammelkamp, K., Bhattacharjee, P. et al. Semantic segmentation of light-toned veins in multimodal ChemCam data. Sci Rep 16, 12052 (2026). https://doi.org/10.1038/s41598-026-47207-0
Palabras clave: Habitabilidad de Marte, Rover Curiosity, Imágenes ChemCam, segmentación por aprendizaje profundo, venas de sulfato de calcio