Clear Sky Science · en
Semantic segmentation of light-toned veins in multimodal ChemCam data
Hidden Clues in Martian Rocks
What if we could read Mars’s watery past directly from tiny cracks in its rocks? This study shows how scientists are teaching computers to spot bright mineral-filled veins in images taken by NASA’s Curiosity rover. These light streaks are signs that water once moved through the rocks. By automating their detection, researchers can comb through thousands of rover images far faster than any human team, sharpening our picture of when and where Mars might have been habitable.
Why Bright Veins Matter for Life on Mars
Curiosity has been roaming Gale Crater since 2012, using an instrument called ChemCam to both photograph rocks up close and zap them with a laser to measure their chemistry. Many rocks along the rover’s path show pale veins—fractures filled with minerals that likely formed from water-rich fluids circulating through the crust. ChemCam’s spectra reveal that these veins are often rich in calcium sulfates, minerals that typically form as water evaporates. Because liquid water is a key ingredient for life, mapping these veins in detail helps scientists reconstruct where long-lasting water once flowed and pooled on Mars.
Turning Pictures and Laser Flashes into Data
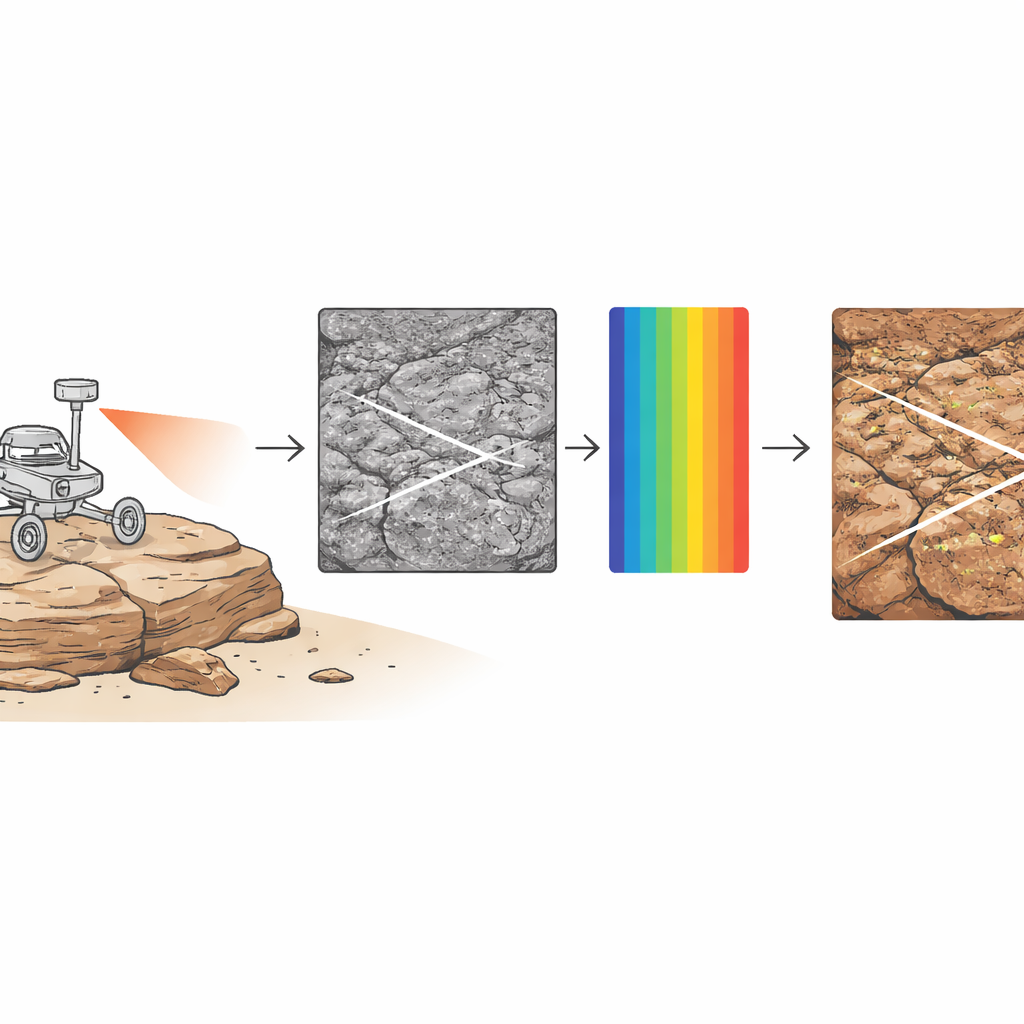
ChemCam provides two kinds of information about each target rock. First, its camera, the Remote Micro Imager, takes sharp grayscale pictures at sub-millimeter resolution, showing textures and fine cracks. Second, its laser-induced breakdown spectroscopy (LIBS) system fires a laser at several points on the rock, creating a tiny glowing plasma whose colors reveal the elements present. From these LIBS measurements, scientists compute how much calcium oxide is in each spot. High calcium levels, above about 10 weight percent, often—but not always—line up with light-toned veins in the images, providing a chemical hint of where these features may be hiding.
Teaching an Algorithm to Trace the Cracks
Manually tracing every vein, pixel by pixel, in thousands of images is tedious and inconsistent, so the team built a specialized training set. They started from earlier work that grouped ChemCam images into texture classes and pulled out about 480 likely vein scenes. From these, experts selected 55 clear examples and painstakingly drew binary masks marking which pixels belonged to veins. They also turned the LIBS calcium data into simple images: bright squares where the laser measured high calcium, dark squares where it did not, and gray where no measurements existed. By cutting each large image into smaller tiles and applying flips, rotations, and zooms, they expanded this small labeled set into hundreds of training samples.
How the Smart Vein Finder Works
The heart of the approach is a family of deep learning models based on U-Net, an image segmentation architecture originally developed for medical scans. The model takes ChemCam rock images as input and predicts, for every pixel, whether it belongs to a vein. The researchers tested several variations: plain U-Nets trained only on images, versions that started from networks pre-trained on large Earth image datasets, and models that folded in LIBS information either as extra image channels or through the loss function that guides learning. Their best performer was a pre-trained U-Net whose loss function gently penalized predictions that disagreed with the calcium-based LIBS images at the laser spots, steering the network toward chemically plausible vein maps. This model achieved around 80% mean intersection-over-union and nearly 89% F1 score—strong performance for such a fine-grained task.
Building Trustworthy Maps for Rover Science
Because these predictions will guide scientific interpretation, the team also tackled a subtle question: how much can we trust each map? They adopted a statistical method called Learn-Then-Test to adjust the model’s output thresholds after training, without changing its weights. By tuning these thresholds on a calibration set, they guaranteed that the overall false discovery rate—the chance that a predicted vein pixel is actually wrong—stayed below about 10%. This post-processing reduced spurious detections at the cost of missing some real veins, trading recall for higher confidence in what is labeled as a vein.
What This Means for Exploring Mars
In plain terms, the study delivers an automated, chemistry-aware "vein tracer" for Curiosity’s image archive, complete with knobs to control how cautious it is about calling something a vein. With it, researchers can quickly survey the entire rover traverse, track how vein abundance and thickness change from place to place, and tie these patterns to the rocks’ chemical makeup. Those patterns, in turn, refine our story of when water moved through Gale Crater’s rocks and how long habitable conditions may have lasted on Mars. The same approach could eventually be extended to other rock features and instruments, helping future rovers turn vast image collections into reliable, map-ready clues about planetary history.
Citation: Lomashvili, A., Rammelkamp, K., Bhattacharjee, P. et al. Semantic segmentation of light-toned veins in multimodal ChemCam data. Sci Rep 16, 12052 (2026). https://doi.org/10.1038/s41598-026-47207-0
Keywords: Mars habitability, Curiosity rover, ChemCam imaging, deep learning segmentation, calcium sulfate veins