Clear Sky Science · it
Segmentazione semantica delle vene di tonalità chiara nei dati multimodali di ChemCam
Indizi nascosti nelle rocce marziane
E se potessimo leggere il passato acquoso di Marte direttamente dalle piccole fratture nelle sue rocce? Questo studio mostra come gli scienziati insegnano ai computer a individuare le vene chiare riempite di minerali nelle immagini scattate dal rover Curiosity della NASA. Queste strisce luminose sono segnali che l’acqua una volta si è mossa attraverso le rocce. Automatizzandone il rilevamento, i ricercatori possono scandagliare migliaia di immagini del rover molto più rapidamente di qualsiasi team umano, affinando la nostra comprensione di quando e dove Marte potrebbe essere stato abitabile.
Perché le vene chiare sono importanti per la vita su Marte
Curiosity esplora il cratere Gale dal 2012, usando uno strumento chiamato ChemCam sia per fotografare le rocce da vicino sia per 'colpirle' con un laser e misurarne la chimica. Molte rocce lungo il percorso del rover mostrano vene pallide—fratture riempite da minerali che probabilmente si sono formati da fluidi ricchi d’acqua circolanti nella crosta. Gli spettri di ChemCam rivelano che queste vene sono spesso ricche di solfati di calcio, minerali che tipicamente si formano quando l’acqua evapora. Poiché l’acqua liquida è un ingrediente chiave per la vita, mappare queste vene in dettaglio aiuta gli scienziati a ricostruire dove l’acqua persistente una volta scorreva e si accumulava su Marte.
Trasformare foto e bagliori laser in dati
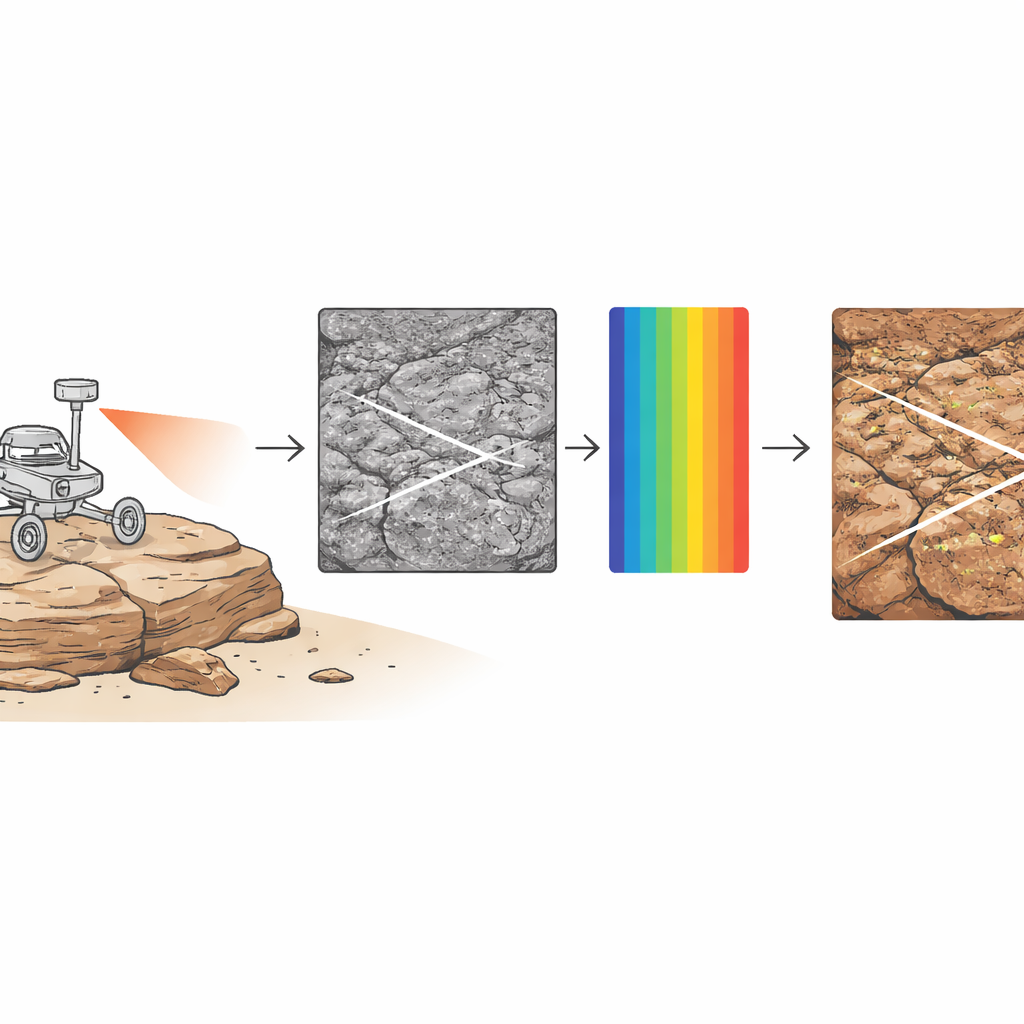
ChemCam fornisce due tipi di informazioni per ogni roccia obiettivo. Primo, la sua camera, il Remote Micro Imager, scatta immagini in scala di grigi ad alta definizione a risoluzione sub-millimetrica, mostrando texture e fratture fini. Secondo, il suo sistema di spettroscopia a emissione indotta da laser (LIBS) spara un laser in vari punti della roccia, creando una piccola plasma incandescente i cui colori rivelano gli elementi presenti. Dalle misure LIBS, gli scienziati calcolano quanto ossido di calcio è presente in ogni punto. Livelli elevati di calcio, sopra circa il 10% in peso, spesso—ma non sempre—corrispondono a vene chiare nelle immagini, fornendo un indizio chimico su dove queste caratteristiche possono nascondersi.
Insegnare a un algoritmo a tracciare le fratture
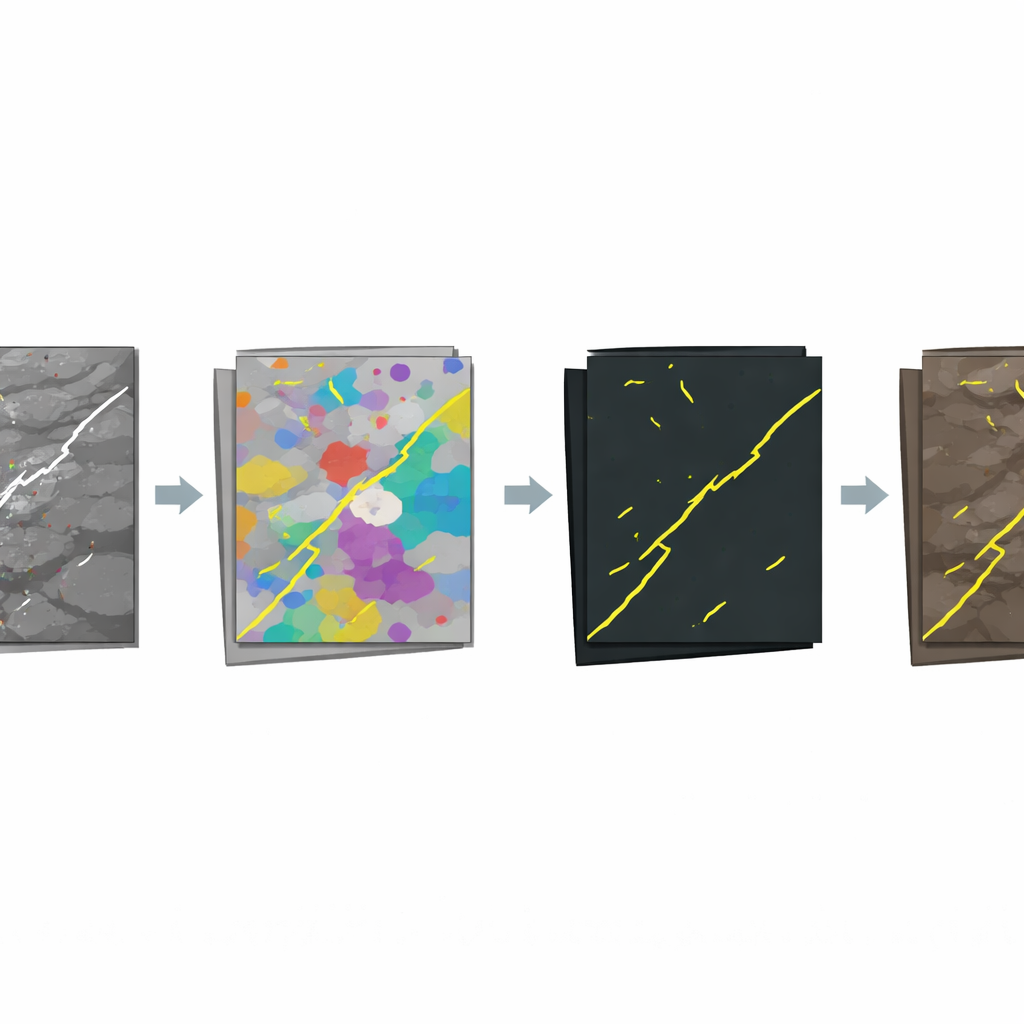
Tracciare manualmente ogni vena, pixel per pixel, in migliaia di immagini è tedioso e incoerente, quindi il team ha costruito un set di addestramento specializzato. Sono partiti da lavori precedenti che raggruppavano le immagini ChemCam in classi di texture e hanno estratto circa 480 scene probabilmente contenenti vene. Da queste, gli esperti hanno selezionato 55 esempi chiari e hanno meticolosamente disegnato maschere binarie segnando quali pixel appartenevano alle vene. Hanno anche trasformato i dati LIBS sul calcio in immagini semplici: quadrati luminosi dove il laser misurava calcio elevato, quadrati scuri dove non lo misurava e grigi dove non esistevano misure. Suddividendo ogni immagine grande in tasselli più piccoli e applicando ribaltamenti, rotazioni e zoom, hanno ampliato questo piccolo insieme etichettato in centinaia di campioni di addestramento.
Come funziona il rilevatore intelligente di vene
Il cuore dell’approccio è una famiglia di modelli di deep learning basati su U-Net, un’architettura di segmentazione d’immagine sviluppata originariamente per scansioni mediche. Il modello prende in input le immagini delle rocce ChemCam e predice, per ogni pixel, se appartiene a una vena. I ricercatori hanno testato diverse varianti: U-Net semplici addestrate solo sulle immagini, versioni che partivano da reti pre-addestrate su grandi dataset di immagini terrestri e modelli che integravano le informazioni LIBS o come canali immagine extra o tramite la funzione di perdita che guida l’apprendimento. Il migliore è risultato essere un U-Net pre-addestrato la cui funzione di perdita penalizzava delicatamente le predizioni in disaccordo con le immagini LIBS basate sul calcio nei punti del laser, orientando la rete verso mappe di vene chimicamente plausibili. Questo modello ha raggiunto circa l’80% di mean intersection-over-union e quasi l’89% di F1 score—una performance solida per un compito così a grana fine.
Costruire mappe affidabili per la scienza del rover
Poiché queste predizioni guideranno l’interpretazione scientifica, il team ha affrontato anche una questione sottile: quanto possiamo fidarci di ciascuna mappa? Hanno adottato un metodo statistico chiamato Learn-Then-Test per aggiustare le soglie di output del modello dopo l’addestramento, senza modificare i pesi. Sintonizzando queste soglie su un set di calibrazione, hanno garantito che il tasso complessivo di false scoperte—la probabilità che un pixel predetto come vena sia effettivamente sbagliato—rimanesse sotto circa il 10%. Questo post-processing ha ridotto le rilevazioni spurie a costo di perdere alcune vene reali, scambiando richiamo per una maggiore fiducia in ciò che viene etichettato come vena.
Cosa significa per l’esplorazione di Marte
In termini pratici, lo studio fornisce un "tracciatore di vene" automatizzato e sensibile alla chimica per l’archivio di immagini di Curiosity, completo di controlli per modulare quanto sia prudente nel definire qualcosa una vena. Con esso, i ricercatori possono esaminare rapidamente l’intero percorso del rover, monitorare come abbondanza e spessore delle vene variano da luogo a luogo e collegare questi schemi alla composizione chimica delle rocce. Questi schemi, a loro volta, affinano la nostra storia su quando l’acqua ha circolato nelle rocce del cratere Gale e per quanto tempo le condizioni abitabili potrebbero essere durate su Marte. Lo stesso approccio potrebbe infine essere esteso ad altre caratteristiche rocciose e strumenti, aiutando i futuri rover a trasformare vaste collezioni di immagini in indizi affidabili e pronti per la mappatura della storia planetaria.
Citazione: Lomashvili, A., Rammelkamp, K., Bhattacharjee, P. et al. Semantic segmentation of light-toned veins in multimodal ChemCam data. Sci Rep 16, 12052 (2026). https://doi.org/10.1038/s41598-026-47207-0
Parole chiave: Abitabilità di Marte, Rover Curiosity, Imaging ChemCam, segmentazione con deep learning, vene di solfato di calcio