Clear Sky Science · ru
Влияние односторонней кортикальной слепоты на положение в полосе и поведение взгляда в задаче руления в виртуальной реальности
Почему потеря части зрения не всегда разрушает навыки вождения
Представьте, что после инсульта вы внезапно теряете большую часть бокового зрения, но вам всё равно нужно передвигаться на автомобиле. Многие люди с «кортикальной слепотой» сталкиваются именно с такой ситуацией. В этом исследовании использована иммерсивная симуляция в виртуальной реальности, чтобы задать практический вопрос с большими последствиями для самостоятельности и безопасности на дороге: если основная зрительная зона мозга повреждена с одной стороны, меняется ли стиль вождения — и становится ли он менее безопасным — потому что люди уже не могут так же хорошо использовать сигналы движения из окружающего мира, как полностью зрячие водители?
Как мозг использует движение для руления
Когда мы едем, узоры движения, проносящиеся по полю зрения — известные как «оптический поток» — помогают судить, куда мы движемся и насколько круто нужно поворачивать руль. Кромки дороги, текстура покрытия и близкие объекты смещаются таким образом, что подсказывают, центрированы ли мы в своей полосе или сносимся в сторону. У людей с односторонней кортикальной слепотой поражение первичной зрительной коры лишает сознательного зрения на четверть или половину поля зрения с одной стороны. Предыдущие работы указывали, что такие водители демонстрируют странные положения в полосе и больше аварий, но оставалось неясным, связана ли проблема с отсутствием информации о движении, «шумной» обработкой движения или с осознанными стратегиями, например созданием дополнительного пространства с той стороны, которую они не видят.
Виртуальная дорога, созданная для изучения руления
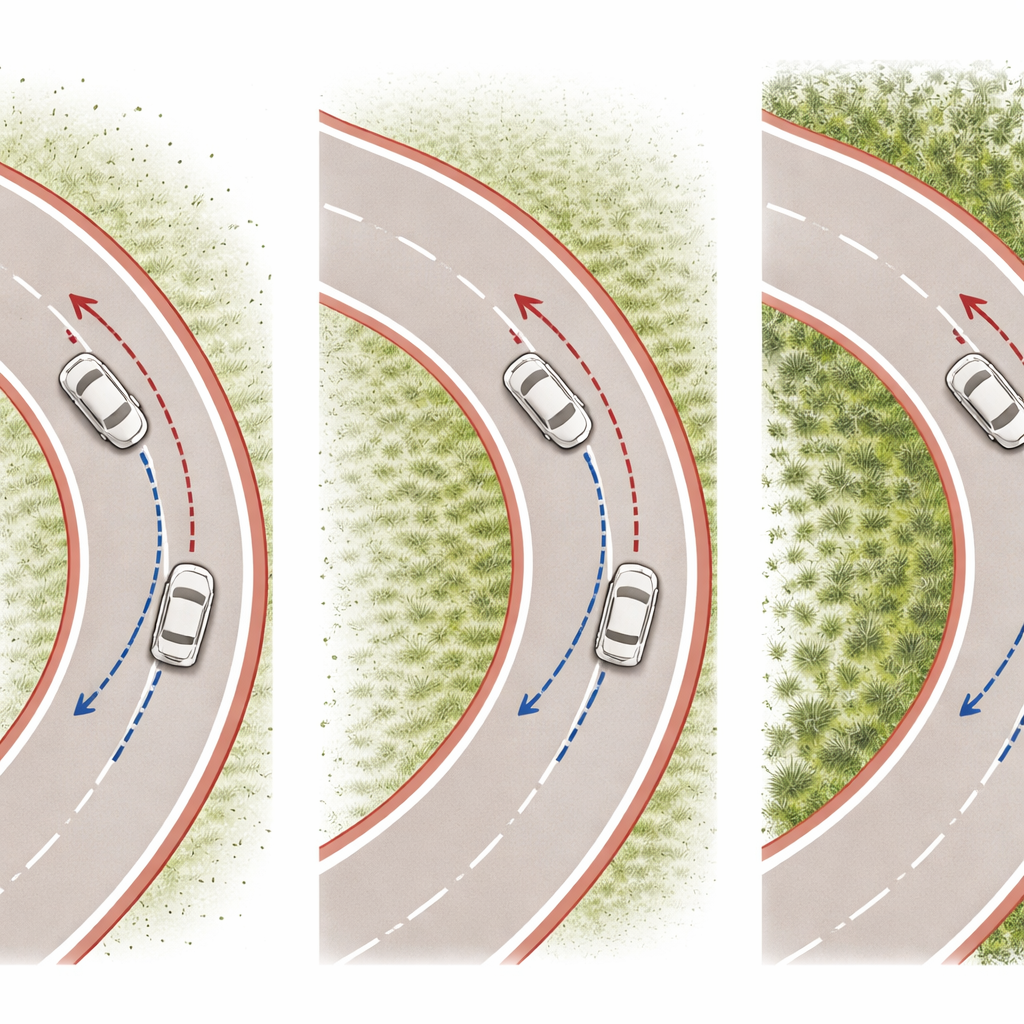
Чтобы разделить эти факторы, исследователи набрали 21 взрослого с кортикальной слепотой — 11 с потерей зрения слева и 10 справа — и 9 людей с нормальным зрением сопоставимого возраста. Участники в шлемах виртуальной реальности и с рулями проезжали по однополосной извилистой дороге на постоянной скорости, стараясь держать машину по центру между ярко-красными краями полосы. Окружение было избавлено от трафика и пешеходов, чтобы основной задачей было руление, а не избегание опасностей. В разных испытаниях менялись три параметра: дорога поворачивала влево или вправо с разной крутизной, а насыщенность визуального потока варьировалась за счёт добавления или удаления текстур — дорожной разметки, деревьев и кустов. Встроенный трекер глаз в шлеме фиксировал, куда смотрели участники и как часто они делали быстрые сдвиги взгляда.
Что изменилось с появлением движения — и что осталось прежним
Все группы, включая людей с кортикальной слепотой, реагировали на изменения в сигналах движения. Когда покрытие и обочины были визуально насыщены, водители склонялись к небольшому «срезанию» поворотов, подводя машину ближе к внутреннему краю кривой. Когда сцена была бедной и видны были только дальние горы и края полосы, они держались дальше от внутреннего края, а положение в полосе становилось более изменчивым. Эти изменения соответствуют наблюдениям у здоровых водителей и подтверждают, что манипуляция движением сработала. Однако у людей с потерей зрения слева изменение среднего положения в полосе при добавлении сигналов движения было слабее, хотя их максимальное смещение и общая изменчивость также улучшались при более богатом визуальном потоке, подобно другим группам. Такая картина наводит на мысль, что некоторые участники с левосторонней потерей зрения могут в меньшей степени полагаться на движение и больше — на другие источники информации, такие как чёткие границы полосы или проприоцептивные ощущения движения.
Движения глаз без дополнительного сканирования
Исследователи также проверяли, компенсируют ли водители с «слепой» стороной это тем, что чаще направляют взгляд в сторону утраченного поля или выполняют больше сканирующих движений. Удивительно, но паттерны взгляда в целом были схожи во всех группах. Все участники склонялись смотреть в сторону внутренней части поворота и демонстрировали плавное покачивание глаз назад-вперёд, типичное при следовании за движущейся сценой. Распределения направлений взгляда были сосредоточены около направления движения, а не сильно смещались в сторону слепого поля, и число быстрых глазных движений за поворот мало различалось между группами. В этой упрощённой, низкорисковой виртуальной среде большинство водителей с кортикальной слепотой не прибегали к особым стратегиям сканирования, чтобы удерживать дорогу в пределах оставшегося зрения.
Что это означает для людей с кортикальной слепотой
Для неспециалиста главный вывод одновременно обнадёживает и предостерегает. С одной стороны, многие аспекты руления и осмотра обстановки за рулём могут сохраняться удивительно полно даже при большой утрате поля зрения, по крайней мере в контролируемой среде без препятствий. С другой стороны, некоторые люди — особенно с потерей зрения слева —, по-видимому, иначе используют сигналы движения из окружающей среды, а виртуальная дорога в исследовании лишена реальных факторов давления, таких как трафик, пешеходы и последствия ошибок. В целом результаты позволяют предположить, что односторонняя кортикальная слепота не приговаривает человека к потере базовой способности рулить, но сторона и конфигурация потери зрения могут тонко менять то, как мозг сочетает движение с другими сигналами для удержания в полосе. Понимание этих различий может помочь разработать более индивидуальные рекомендации по вождению и реабилитацию для людей с таким повреждением зрительной коры.
Цитирование: Giguere, A.P., Cavanaugh, M.R., Huxlin, K.R. et al. The effect of unilateral cortical blindness on lane position and gaze behavior in a virtual reality steering task. Sci Rep 16, 11421 (2026). https://doi.org/10.1038/s41598-026-35805-x
Ключевые слова: кортикальная слепота, оптический поток, вождение в виртуальной реальности, управление рулём, движения глаз