Clear Sky Science · fr
Contrôleur PID sigmoïde optimisé par Hippopotamus pour le contrôle de la fréquence de charge d’un système électrique thermique à deux zones avec sources renouvelables
Maintenir l’éclairage stable dans un monde renouvelable
À mesure que de nouvelles fermes éoliennes et des panneaux solaires sont ajoutés aux réseaux électriques, il devient plus difficile de maintenir la fréquence du courant stable. Quand la fréquence vacille, des appareils sensibles, des processus industriels et même la stabilité du réseau lui-même peuvent être mis en danger. Cet article explore une nouvelle manière de contenir ces oscillations en combinant un contrôleur adaptatif avec une méthode de recherche inspirée de la nature modélisée sur le comportement de l’hippopotame.
Pourquoi la fréquence importe dans la vie quotidienne
La plupart des gens ne pensent jamais à la fréquence du réseau, pourtant elle sous-tend discrètement la fiabilité de chaque prise et chaque appareil. Dans les grands systèmes électriques, des dizaines voire des centaines de générateurs doivent fonctionner en synchronisme pour maintenir la fréquence proche d’une valeur standard (50 ou 60 Hz). Si la demande totale augmente soudainement, la fréquence a tendance à chuter ; si la production dépasse la demande, elle a tendance à augmenter. Les réseaux modernes interconnectent aussi des régions, partageant la puissance via des lignes de liaison. Quand une région éternue, pour ainsi dire, ses voisines peuvent ressentir l’impact. L’essor de la production variable solaire et éolienne complique ce jeu d’équilibre, car leurs sorties peuvent changer rapidement avec les nuages ou des rafales de vent. Les contrôleurs classiques à règles fixes qui fonctionnaient bien autrefois peinent aujourd’hui à maintenir la fréquence et les échanges de puissance de ligne d’interconnexion dans des limites sûres.
Nouveau type de commande pour un réseau à deux régions
Les auteurs se concentrent sur un modèle réaliste de deux zones voisines reliées par une ligne de liaison. Une zone héberge de l’énergie solaire aux côtés d’une centrale thermique classique, tandis que l’autre associe de l’éolien à une unité thermique similaire. Chaque zone comprend des dispositifs tels que régulateurs, turbines et le système de puissance en masse, tous représentés par des modèles dynamiques simples. La tâche centrale est le contrôle de la fréquence de charge : inciter automatiquement les générateurs afin que la fréquence locale et la puissance échangée par la ligne de liaison restent stables lorsque les charges ou la production renouvelable varient. 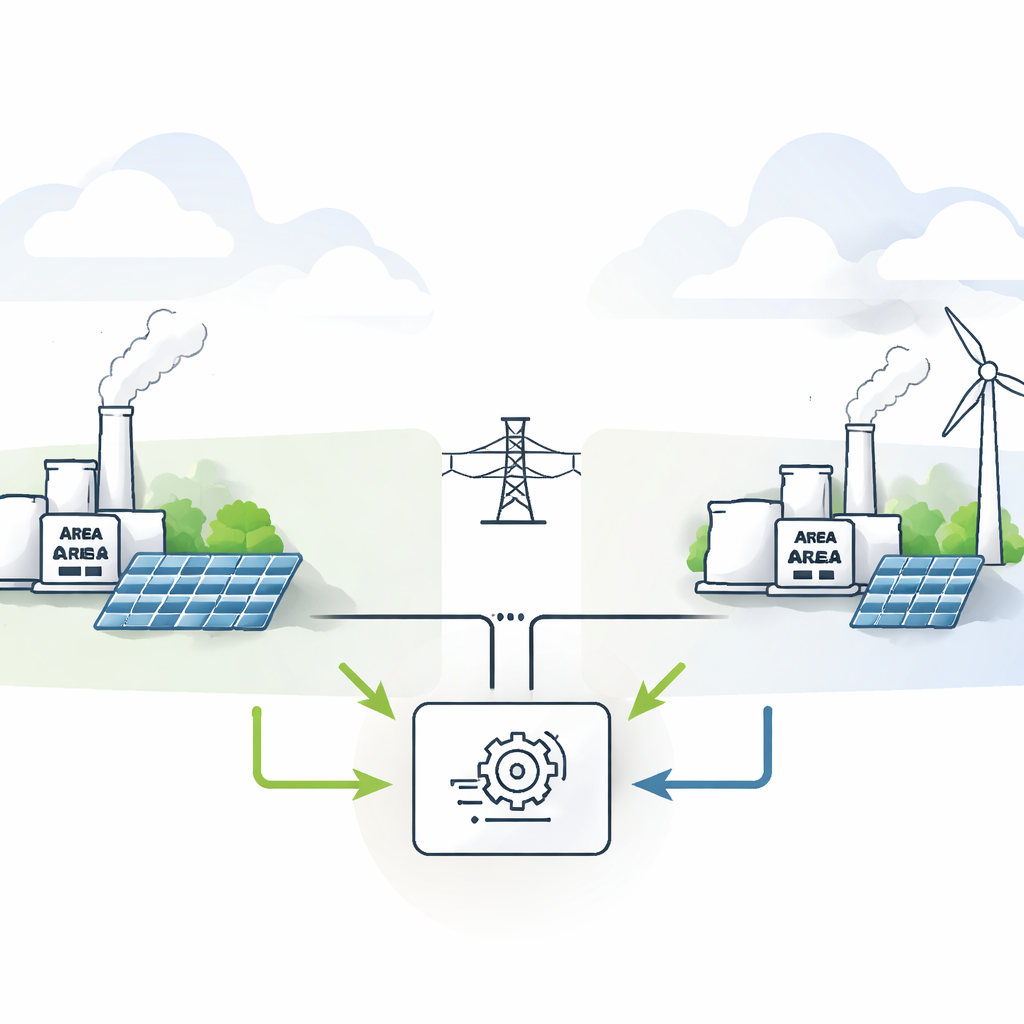
Des gains plus intelligents grâce à une courbe de réponse lisse
Les contrôleurs PID conventionnels utilisent trois réglages constants qui réagissent à l’erreur présente, à l’erreur passée et au taux de variation de l’erreur. Ils sont souvent ajustés une fois autour d’un point de fonctionnement « normal » puis laissés tels quels. Dans un réseau soumis à de fortes variations renouvelables et à des composants non linéaires, cela suffit rarement. Le contrôleur PID sigmoïde (SPID) proposé permet à ces trois réglages de changer en temps réel, mais dans des limites soigneusement choisies. Il le fait en utilisant une courbe en S lisse — la fonction sigmoïde — qui augmente ou diminue progressivement l’agressivité du contrôleur à mesure que l’ampleur du déséquilibre croît. Les petites perturbations obtiennent un comportement doux, proche du classique ; les fortes perturbations poussent le contrôleur vers une action plus énergique, sans basculer vers des valeurs extrêmes susceptibles de provoquer de nouvelles oscillations.
Laisser les hippos chercher les meilleurs réglages
Concevoir un tel contrôleur adaptatif revient à décider de 18 paramètres différents qui gouvernent les bornes inférieures et supérieures de ses gains internes et la vitesse à laquelle ils évoluent le long de la courbe en S. Plutôt que d’ajuster ces paramètres manuellement, l’étude utilise l’algorithme d’optimisation Hippopotamus, un membre récent de la famille des métaheuristiques. Dans cette approche, chaque hippopotame virtuel représente un jeu de paramètres possible, et leurs déplacements dans un espace de recherche mathématique mimétisent la façon dont un troupeau explore, défend et s’échappe dans la nature. L’algorithme cherche à minimiser une mesure appelée l’intégrale de l’erreur absolue pondérée par le temps, qui pénalise fortement les erreurs de longue durée. 
Performance de la nouvelle approche sous contrainte
Avec le contrôleur réglé par l’algorithme Hippopotamus, l’étude soumet le réseau à deux zones à une batterie de tests. Ceux-ci incluent des augmentations et diminutions soudaines de charge dans une ou les deux zones, des cas avec et sans zone morte du régulateur, et des variations réalistes de la production solaire et éolienne sur une fenêtre de 100 secondes. Le contrôleur proposé est comparé à plusieurs autres schémas qui utilisent des PID à gain fixe réglés par différentes métaheuristiques. Dans presque tous les scénarios, la nouvelle méthode ramène la fréquence et la puissance de la ligne de liaison à des niveaux acceptables plus rapidement, avec des dépassements et des creux plus faibles, et une erreur globale moindre selon l’indice choisi. Même lorsque tous les paramètres clés du système sont déplacés de plus ou moins 25 à 50 % — simulant des erreurs de modélisation ou le vieillissement de l’équipement — le contrôleur conserve un comportement stable. Des analyses supplémentaires dans le domaine fréquentiel, utilisant des diagrammes de Bode, montrent que le système conserve des marges de sécurité confortables contre l’instabilité sur une large gamme de conditions.
Ce que cela signifie pour les réseaux électriques futurs
En termes clairs, les résultats de l’article suggèrent que la combinaison d’un contrôleur adaptatif à réponse lisse et d’une stratégie de recherche puissante peut aider les réseaux futurs à absorber les perturbations introduites par les renouvelables et les particularités matérielles. Plutôt que de s’appuyer sur un réglage unique, le schéma proposé adapte automatiquement sa réponse à l’ampleur de chaque perturbation tout en restant dans des limites sûres. Parce que l’approche repose encore sur des structures de commande bien connues et des besoins de calcul modestes, elle présente une voie réaliste vers une utilisation pratique. À mesure que les réseaux poursuivent leur décarbonation et deviennent plus complexes, un contrôle de fréquence robuste et adaptable pourrait jouer un rôle important pour maintenir la fourniture d’énergie de façon sûre et fiable.
Citation: Can, Ö., Ayas, M.Ş. & Şahin, A.K. Hippopotamus optimization–tuned sigmoid PID controller for load frequency control of a two-area thermal power system with renewable energy sources. Sci Rep 16, 11763 (2026). https://doi.org/10.1038/s41598-026-41620-1
Mots-clés: contrôle de la fréquence de charge, réseaux électriques renouvelables, contrôleur PID adaptatif, optimisation métaheuristique, stabilité du système électrique