Clear Sky Science · es
Controlador PID sigmoide optimizado mediante Hipopótamo para el control de frecuencia de carga de un sistema térmico de dos áreas con fuentes de energía renovable
Mantener las luces estables en un mundo renovable
A medida que se integran más parques eólicos y paneles solares en las redes eléctricas, mantener la frecuencia de la electricidad estable se vuelve más difícil. Cuando la frecuencia oscila, los dispositivos sensibles, los procesos industriales e incluso la estabilidad de la propia red pueden verse en riesgo. Este artículo explora una nueva forma de mantener bajo control esas oscilaciones combinando un controlador adaptativo con un método de búsqueda inspirado en la naturaleza, modelado a partir del comportamiento del hipopótamo.
Por qué la frecuencia importa en la vida cotidiana
La mayoría de la gente nunca piensa en la frecuencia de la red, sin embargo ésta sustenta discretamente la fiabilidad de cada enchufe y toma. En grandes sistemas eléctricos, decenas o cientos de generadores deben trabajar sincronizados para mantener la frecuencia cerca de un valor estándar (50 o 60 Hz). Si la demanda total aumenta de repente, la frecuencia tiende a caer; si la generación excede la demanda, tiende a subir. Las redes modernas también interconectan regiones, compartiendo energía a través de líneas de interconexión. Cuando una región sufre un contratiempo, por así decirlo, sus vecinas lo notan. El auge de la generación variable solar y eólica complica este acto de equilibrio, porque su producción puede cambiar rápidamente con nubes o ráfagas de viento. Los controladores tradicionales de regla fija que antes funcionaban bien ahora luchan por mantener la frecuencia y las variaciones de potencia en las líneas de interconexión dentro de límites seguros.
Nueva forma de control para una red de dos regiones
Los autores se centran en un modelo realista de dos áreas vecinas vinculadas por una línea de interconexión. Una zona aloja energía solar junto a una planta térmica clásica, mientras que la otra combina energía eólica con una unidad térmica similar. Cada área incluye dispositivos como gobernadores, turbinas y el sistema eléctrico mayor, todos representados con modelos dinámicos sencillos. Una tarea central es el control de frecuencia de carga: ajustar automáticamente los generadores para que tanto la frecuencia local como la potencia intercambiada por la línea de interconexión permanezcan estables cuando cambian las cargas o la producción renovable. 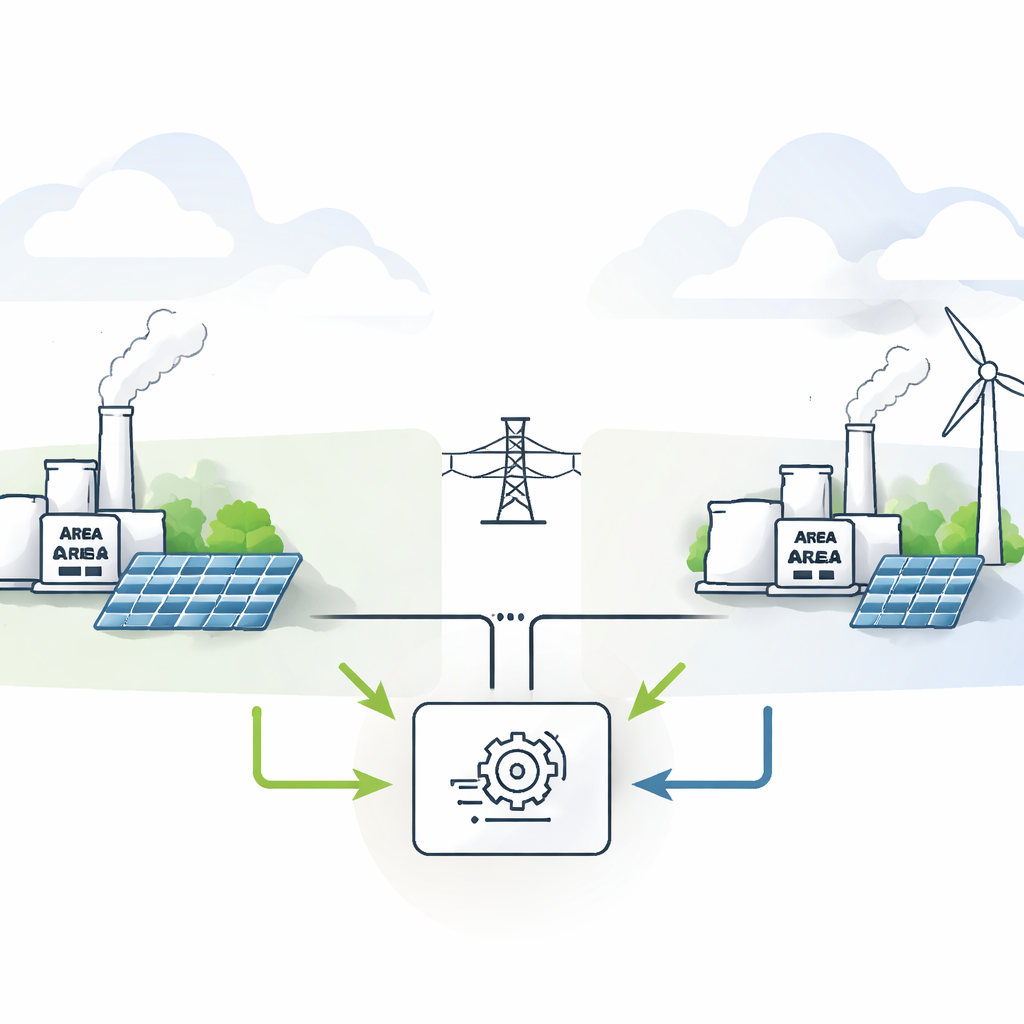
Ganancias más inteligentes mediante una curva de respuesta suave
Los controladores convencionales tipo PID usan tres ajustes constantes que reaccionan al error presente, al error pasado y a la rapidez con la que el error cambia. A menudo se sintonizan una vez alrededor de un punto de operación «normal» y luego se dejan sin tocar. En una red con fuertes variaciones renovables y hardware no lineal, eso rara vez es suficiente. El controlador PID sigmoide propuesto (SPID) permite que esos tres ajustes cambien en tiempo real, pero dentro de límites cuidadosamente seleccionados. Lo hace usando una curva en forma de S —la función sigmoide— que aumenta o disminuye gradualmente la agresividad del controlador conforme crece el desequilibrio. Las perturbaciones pequeñas reciben una actuación suave, casi clásica; las perturbaciones grandes empujan al controlador hacia una acción más fuerte, sin saltar a valores extremos que causarían nuevas oscilaciones.
Dejar que los hipopótamos busquen los mejores ajustes
Diseñar un controlador adaptativo así implica decidir 18 parámetros diferentes que gobiernan los límites inferior y superior de sus ganancias internas y la rapidez con la que se desplazan a lo largo de la curva en S. En lugar de intentar ajustar estos manualmente, el estudio utiliza el algoritmo de Optimización Hipopótamo, un miembro reciente de la familia de las metaheurísticas. En este enfoque, cada hipopótamo virtual representa un posible conjunto de parámetros, y sus movimientos en un espacio de búsqueda matemático imitan cómo una manada explora, defiende y se desplaza en la naturaleza. El algoritmo busca minimizar una medida llamada Integral del Error Absoluto ponderado por el tiempo, que penaliza fuertemente los errores que persisten más tiempo. 
Cómo se comporta el nuevo enfoque bajo estrés
Con el controlador sintonizado por el algoritmo hipopótamo, el estudio somete la red de dos áreas a una batería de pruebas. Estas incluyen aumentos y disminuciones repentinos de carga en una o ambas zonas, casos con y sin banda muerta del gobernador, y cambios realistas en la producción solar y eólica durante una ventana de 100 segundos. El controlador propuesto se compara con otros esquemas que usan controladores PID de ganancia fija ajustados por distintas metaheurísticas. En casi todos los escenarios, el nuevo método devuelve la frecuencia y la potencia en la línea de interconexión a niveles aceptables más rápido, con sobreimpulsos y subimpulsos menores, y un error global más bajo según el índice elegido. Incluso cuando todos los parámetros clave del sistema se desplazan entre ±25 y ±50 por ciento —imitando errores de modelado o envejecimiento del equipo—, el controlador mantiene un comportamiento estable. Un análisis adicional en el dominio de la frecuencia, mediante diagramas de Bode, muestra que el sistema conserva márgenes de seguridad cómodos frente a la inestabilidad en una amplia gama de condiciones.
Qué significa esto para las redes eléctricas futuras
En términos sencillos, los hallazgos del artículo sugieren que combinar un controlador adaptable con respuesta suave y una potente estrategia de búsqueda puede ayudar a las redes futuras a superar las perturbaciones introducidas por las renovables y las particularidades del hardware. En lugar de confiar en una sintonía única para todos, el esquema propuesto moldea automáticamente su respuesta al tamaño de cada perturbación manteniéndose dentro de límites seguros. Dado que el enfoque se basa en estructuras de control bien conocidas y un cómputo moderado, tiene una ruta realista hacia el uso práctico. A medida que las redes continúen descarbonizándose y volviéndose más complejas, un control de frecuencia robusto y adaptable como este podría desempeñar un papel importante para mantener el flujo de energía de manera segura y fiable.
Cita: Can, Ö., Ayas, M.Ş. & Şahin, A.K. Hippopotamus optimization–tuned sigmoid PID controller for load frequency control of a two-area thermal power system with renewable energy sources. Sci Rep 16, 11763 (2026). https://doi.org/10.1038/s41598-026-41620-1
Palabras clave: control de frecuencia de carga, redes de energía renovable, controlador PID adaptativo, optimización metaheurística, estabilidad del sistema eléctrico