Clear Sky Science · zh
基于额外树的专家混合体用于表面肌电手势识别
读取肌肉以驱动人工手
想象一下仅凭前臂肌肉的收缩就能控制机器人手,像移动自己手指一样自然。本研究探索如何将肌肉发出的微弱电信号转换为假肢手或其他设备的可靠命令,采用一种更智能的计算模型来实现对多种手势的实时识别。
皮肤下的信号
当我们移动手部时,肌肉会产生微小的电信号,这些信号可以在皮肤表面被检测到。研究者使用表面肌电图(sEMG),通过将粘性电极贴在前臂上在无需针刺或手术的情况下采集信号。对于每一种手势,比如张开手或屈某些手指,电活动的模式都有细微不同。挑战在于这些信号很微弱,容易被动作、附近电子设备或其他肌肉产生的噪声污染,因此必须仔细清理并转换成计算机能够理解的数字形式。
清理并切分肌电信号
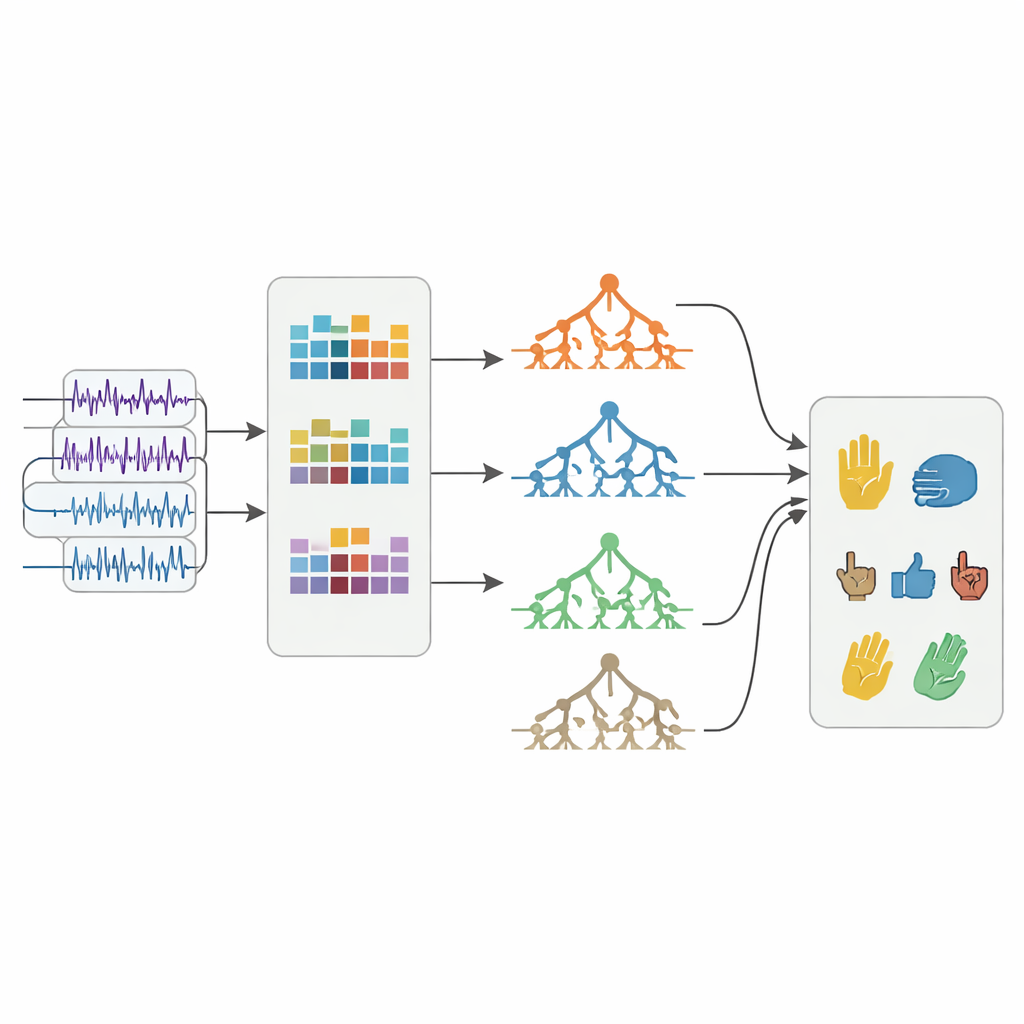
为了让原始sEMG记录变得有意义,研究团队首先滤除来自电网的嗡嗡声以及其他低频和高频干扰,保留主要的真实肌肉活动。研究者没有把每段长录音当作一个整体处理,而是把信号切成短且重叠的时间窗,每窗约四分之一秒。从每个窗口计算17个简单的数值特征,描述信号的强度、变异性和能量特性,在时域和频域上都有刻画。这样就产生了数千个紧凑的“快照”,展示每次手势期间肌肉的行为,为训练识别算法提供原始素材。
多名小专家而非一位大法官
此前大多数系统在所有手势上训练单一机器学习模型,这在某些手势相似时容易导致偏差。本文作者提出了一种不同策略,称为MEET(Mixture of Experts Extra Trees,额外树专家混合体)。MEET不是依赖一个通用判决器,而是使用多名“专家”模型,每个专家仅在一小部分手势上训练,另有一个“门控”模型见过所有手势。这些模型都基于Extra Trees——一种通过引入随机性构建多棵简单决策树的集成技术,以避免过拟合。使用时,每个专家给出自己的预测,门控模型则决定在当前信号下应该多大程度信任每个专家。最终结果是这些意见的加权混合,从而减少偏差并强化相似手势之间的判别界限。
在真实人群与公开数据上的测试
研究者从四名健康志愿者处记录了sEMG数据,每人执行六种不同的手部动作,每次持续数十秒。他们在大部分数据上训练MEET和十种标准机器学习方法,并在剩余数据上测试。MEET在四位受试者中始终比竞争模型更频繁地识别出正确手势,准确率在约78%到89%之间,并且优于其组成基础模型——普通的Extra Trees。为检验该方法是否仅适用于他们的实验室记录,研究者还在一个著名的公开sEMG数据库上评估MEET,该数据库包含15种手势和8名受试者。即便在该数据集上,MEET也取得了最佳表现,平均准确率比次优方法提高约1.25%,同时计算开销仍然足够低,适合用于小型嵌入式设备。
这对日常生活的意义
简言之,这项研究表明“一组专家”比单一通用模型更可靠地读取肌电信号。通过将多个专注的分类器与一个平衡其影响的门控模型结合,MEET在保持实时控制效率的同时减少了常见的问题,如过拟合和偏差。对于使用假肢手、游戏界面或可穿戴控制器的人来说,这可能意味着更平滑、更准确的响应,感觉更接近自然手的运动。尽管当前研究仅涉及少数志愿者和一组固定手势,但它为未来更灵活、更可靠的肌电驱动控制系统奠定了基础,未来可支持更多类型的用户和动作。
引用: Gehlot, N., Jena, A., Kumar, R. et al. Mixture of experts extra tree-based sEMG hand gesture recognition. Sci Rep 16, 11787 (2026). https://doi.org/10.1038/s41598-026-40305-z
关键词: 手势识别, 表面肌电图, 假肢控制, 机器学习, 专家混合体