Clear Sky Science · ja
専門家混合型エクストラツリーに基づく表面筋電図(sEMG)手勢認識
人工の手を動かすために筋肉を読み取る
前腕の筋肉を緊張させるだけで、自分の指を動かすのと同じ自然さでロボットハンドを操作できると想像してください。本研究は、筋肉から発生する微弱な電気信号を、義手や他の装置のための信頼できるコマンドに変換する方法を調べています。多数の手の動作をリアルタイムで認識できる、より賢い種類の計算モデルを用いることが柱です。
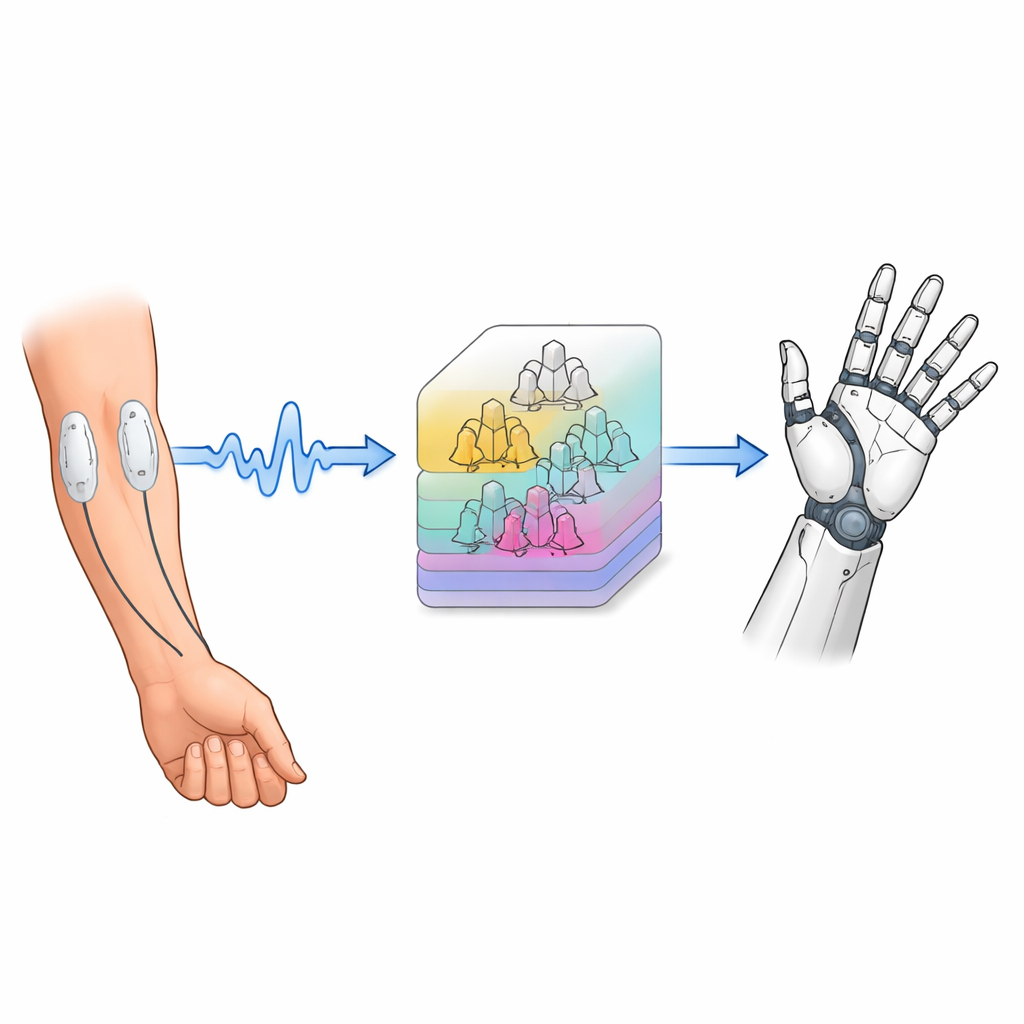
皮膚の下に隠れた信号
手を動かすとき、筋肉は微弱な電気信号を発生し、それは皮膚表面で検出できます。研究者たちは表面筋電図(sEMG)を用い、前腕に貼付した電極で針や手術を使わずに信号を拾います。手を開く、特定の指を曲げるなど各ジェスチャーごとに電気活動のパターンはわずかに異なります。課題はこれらの信号が非常に小さく、動作や近くの電子機器、他の筋肉からの雑音に容易に汚染されることです。したがって、信号は慎重にクリーンアップされ、コンピュータが扱える数値に変換される必要があります。
筋電信号のクリーンアップと区切り
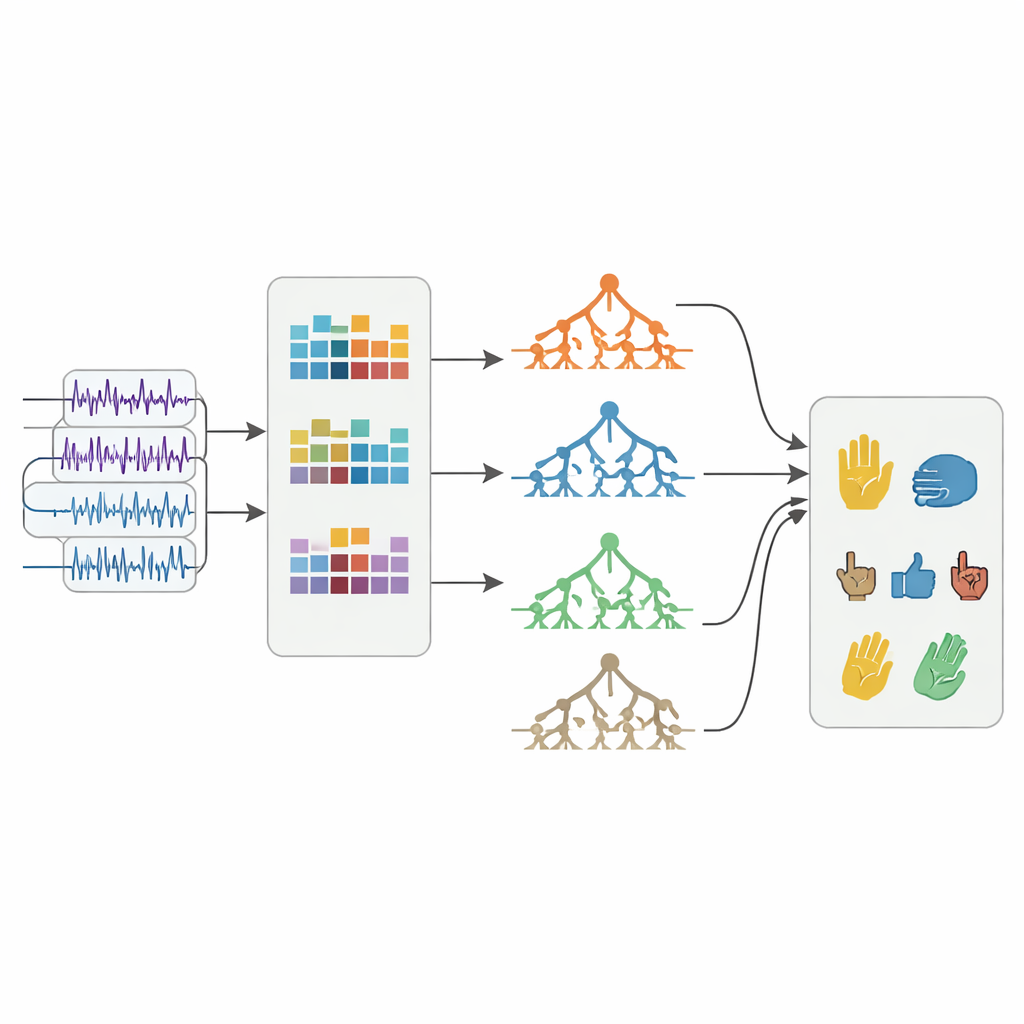
生のsEMG記録を理解可能にするために、まず交流電源のハムやその他の低域・高域の干渉を取り除き、主に真の筋活動だけを残します。長い記録をひとまとめに扱う代わりに、信号を重なりのある短い時間窓に切り分けます。1窓は約0.25秒ほどです。各窓からは、時間領域および周波数領域で信号の強さ、変動性、エネルギーを表す17の単純な数値特徴を計算します。これにより、各ジェスチャーで筋肉がどのように振る舞ったかを示す何千ものコンパクトなスナップショットが得られ、認識アルゴリズムの学習素材となります。
一人の大審判ではなく、多数の小さな専門家
以前の多くのシステムはすべてのジェスチャーを一つの機械学習モデルで学習させていましたが、似たジェスチャーがあると誤判断しやすくバイアスが生じます。本研究ではMEET(Mixture of Experts Extra Trees)と呼ぶ別の戦略を提案します。万能の一人の審判の代わりに、MEETは少数のジェスチャーだけを学習した「専門家」モデル群と、すべてのジェスチャーを見た「ゲート」モデルを組み合わせます。これらのモデルはいずれもエクストラツリー(Extra Trees)に基づいており、多数の単純な決定木をランダム性を加えて構築することで過学習を防ぎます。運用時には各専門家がそれぞれ予測を出し、ゲートが現在の信号に対してどの専門家をどれだけ信頼するかを決めます。最終的な判断はこれらの意見の加重合成であり、類似するジェスチャー間の境界を明瞭にしてバイアスを低減します。
実際の人と公開データでの検証
研究者たちは4人の健常被験者からsEMGデータを記録し、各被験者は6種類の手の動作を数十秒ずつ行いました。データの大半でMEETと標準的な10の機械学習手法を訓練し、残りで検証しました。MEETは常に競合モデルより高い正答率を示し、4人の被験者でおおむね78%から89%の精度を達成し、その構成要素である単純なエクストラツリーモデルよりも優れていました。手法が研究室の記録に特化したものかどうかを確認するため、15種類の手ジェスチャーと8人の被験者を含む広く知られた公開sEMGデータベースでも評価しました。そこでもMEETは最良の性能を示し、次善の手法に比べ平均精度を約1.25%向上させつつ、組み込み機器での利用に十分な計算効率を保ちました。
日常生活での意義
要するに、本研究は「専門家チーム」が単一の万能モデルよりも筋電信号をより確実に読み取れることを示しています。複数の焦点を絞った分類器をゲートで重み付けして組み合わせることで、過学習やバイアスといった一般的な問題を軽減しつつ、リアルタイム制御に十分な効率性を保ちます。義手の利用者、ゲーム用インターフェース、ウェアラブルコントローラにとって、これにより自然な手の動きに近い、より滑らかで正確な反応が得られる可能性があります。現状の研究は被験者数やジェスチャーの種類が限られるものの、将来的により多様な利用者と動作に対応できる柔軟で信頼性の高い筋駆動制御システムの基礎を築くものです。
引用: Gehlot, N., Jena, A., Kumar, R. et al. Mixture of experts extra tree-based sEMG hand gesture recognition. Sci Rep 16, 11787 (2026). https://doi.org/10.1038/s41598-026-40305-z
キーワード: 手のジェスチャー認識, 表面筋電図, 義手制御, 機械学習, 専門家混合モデル