Clear Sky Science · ru
Распознавание жестов руки по sEMG с использованием смеси экспертов на основе Extra Trees
Чтение мышц для приведения в движение искусственных рук
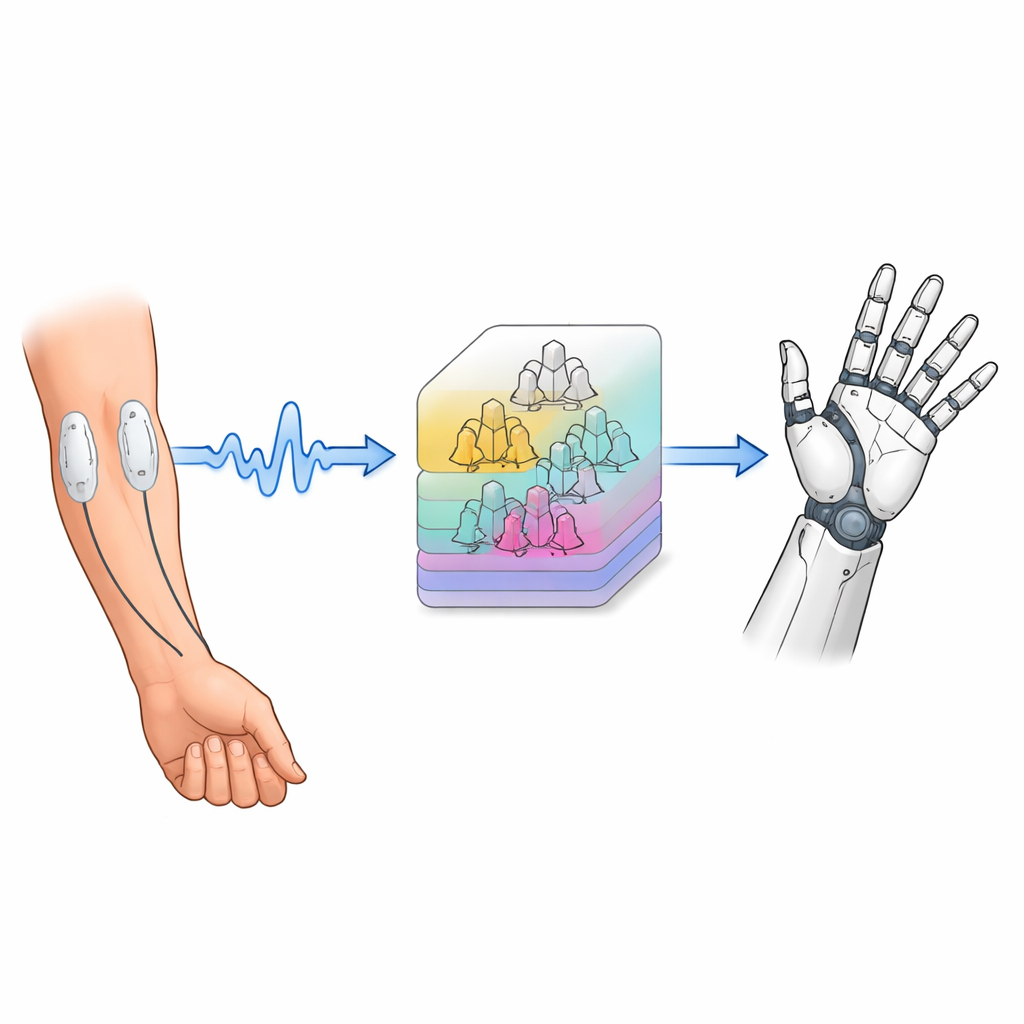
Представьте себе возможность управлять роботизированной рукой, просто напрягая мышцы предплечья, так же естественно, как вы двигаете собственными пальцами. Это исследование изучает, как превратить те слабые электрические сигналы от мышц в надежные команды для протезов и других устройств, используя более интеллектуальную модель, которая способна в реальном времени распознавать множество различных жестов руки.
Сигналы, скрытые под кожей
Когда мы двигаем руками, мышцы генерируют крошечные электрические сигналы, которые можно обнаружить на поверхности кожи. Исследователи используют поверхностную электромиографию (sEMG), при которой липкие электроды размещают на предплечье, чтобы снимать эти сигналы без игл и операций. Для каждого жеста, например открытия кисти или сгибания отдельных пальцев, паттерн электрической активности немного отличается. Проблема в том, что эти сигналы очень малы и легко загрязняются шумом от движений, окружающей электроники или других мышц, поэтому их необходимо тщательно очищать и переводить в числовые признаки, понятные компьютеру.
Очистка и разбиение мышечных сигналов
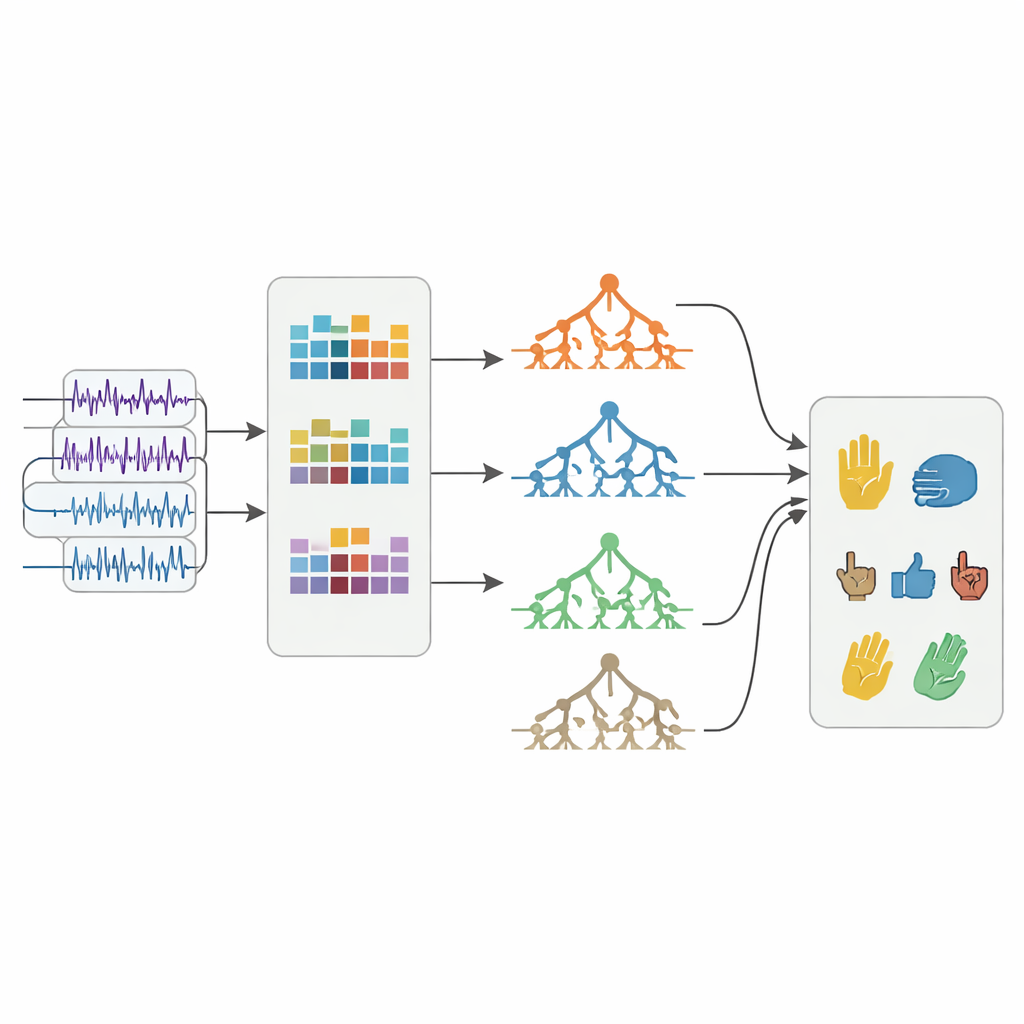
Чтобы разобраться с сырыми записями sEMG, команда сначала фильтрует нежелательные помехи от сетевого питания и другие низко- и высокочастотные искажения, оставляя в основном истинную мышечную активность. Вместо того чтобы рассматривать каждую длинную запись как единый большой фрагмент, сигналы режут на короткие перекрывающиеся временные окна примерно по четверти секунды. Из каждого окна вычисляют 17 простых числовых признаков, которые описывают силу, изменчивость и энергетический характер сигнала во временной и частотной областях. Это дает тысячи компактных снимков поведения мышц для каждого жеста — исходный материал, на котором обучаются алгоритмы распознавания.
Много небольших специалистов вместо одного большого судьи
Большинство ранних систем обучали одну модель машинного обучения на все жесты сразу, что может приводить к смещенным решениям, когда некоторые жесты выглядят очень похоже. В этой работе авторы предлагают другую стратегию, названную MEET (Mixture of Experts Extra Trees). Вместо одного универсального «судьи» MEET использует несколько «экспертных» моделей, каждая из которых обучена на небольшом подмножестве жестов, а также одну «входную» (gate) модель, которая видела все жесты. Все эти модели основаны на Extra Trees — ансамбле древообразных классификаторов, который строит множество простых решающих деревьев с добавленной случайностью, чтобы избежать переобучения. Во время работы эксперты делают свои прогнозы, а входная модель решает, сколько доверять каждому эксперту для текущего сигнала. Окончательный выбор получается в виде взвешенного сочетания этих мнений, что снижает смещение и уточняет границы между похожими жестами.
Тестирование на реальных людях и публичных данных
Исследователи записали sEMG-данные у четырех здоровых добровольцев, каждый из которых выполнял шесть различных действий рукой в течение десятков секунд за раз. Они обучили MEET и десять стандартных методов машинного обучения на большей части данных и протестировали на оставшейся части. MEET стабильно распознавал правильный жест чаще, чем конкурирующие модели, достигая точности примерно от 78% до 89% для каждого из четырех человек и превосходя свою базовую составляющую — обычную модель Extra Trees. Чтобы убедиться, что подход не адаптирован только к их лабораторным записям, они также оценили MEET на известной публичной базе sEMG, включающей 15 жестов и восемь испытуемых. И там MEET показал наилучший результат, улучшив среднюю точность примерно на 1,25% по сравнению с лучшим из оставшихся методов, оставаясь при этом достаточно экономичным для использования на небольших встроенных устройствах.
Почему это важно для повседневной жизни
Проще говоря, это исследование показывает, что «команда специалистов» может читать мышечные сигналы надежнее, чем одна универсальная модель. Объединяя несколько сфокусированных классификаторов с входной моделью, уравновешивающей их влияние, MEET уменьшает типичные проблемы вроде переобучения и смещения, сохраняя при этом достаточную эффективность для управления в реальном времени. Для людей, использующих протезы рук, игровые интерфейсы или носимые контроллеры, это может означать более плавные и точные отклики, ближе к ощущению движения натуральной руки. Хотя текущее исследование включает лишь небольшое число добровольцев и фиксированный набор жестов, оно закладывает основу для более гибких и надежных систем управления на основе мышц, которые в будущем смогут поддерживать более широкий круг пользователей и движений.
Цитирование: Gehlot, N., Jena, A., Kumar, R. et al. Mixture of experts extra tree-based sEMG hand gesture recognition. Sci Rep 16, 11787 (2026). https://doi.org/10.1038/s41598-026-40305-z
Ключевые слова: распознавание жестов руки, поверхностная электромиография, управление протезом, машинное обучение, смесь экспертов