Clear Sky Science · zh
一个细粒度轻量级的城市信号化路口密集冲突轨迹数据集
为什么繁忙的城市路口很重要
凡是在拥挤路口等候过的人都知道那种混乱感:汽车、公交、自行车和行人同时试图移动。该研究提出了一个简单的问题:我们如何真正理解这些近失误和突停发生时的情形,以便工程师和未来的无人驾驶车辆能让路口对所有人更安全、更顺畅?
从空中观察交通
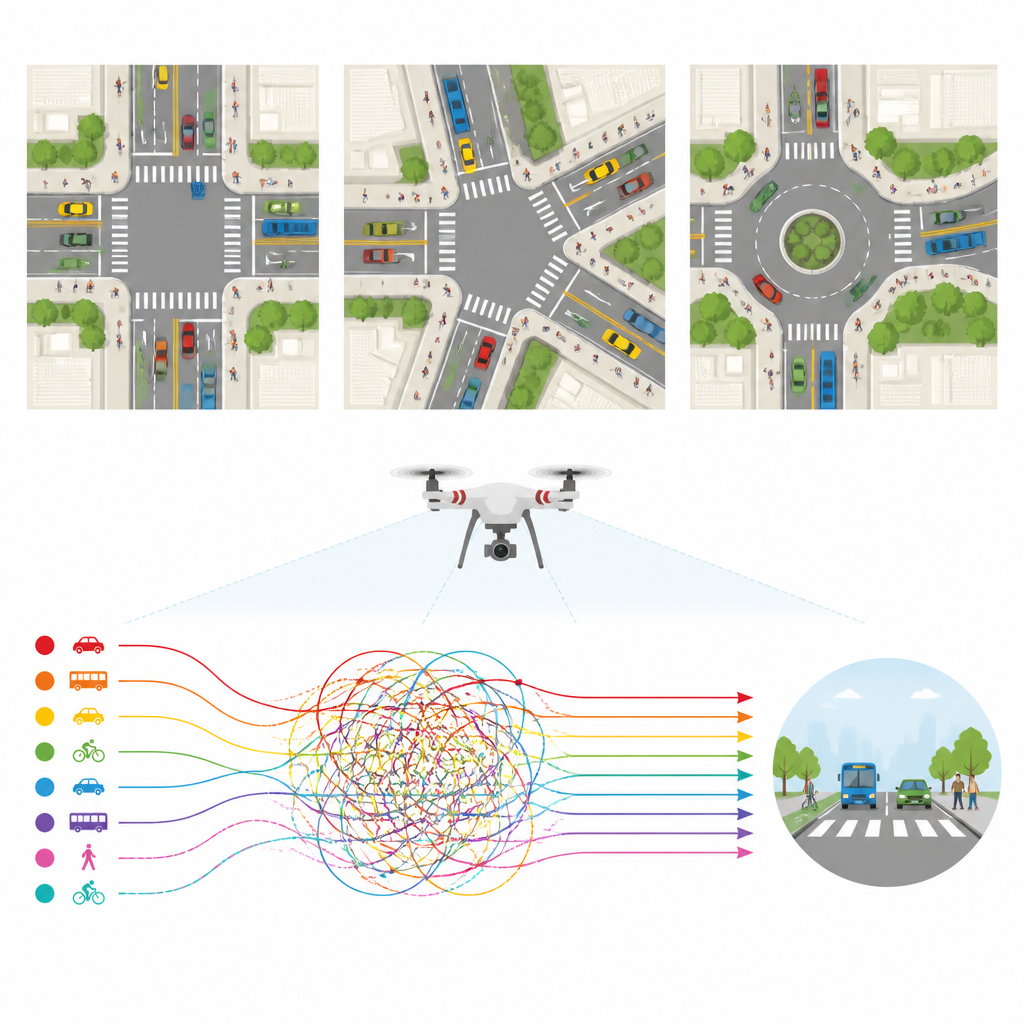
为了解答这一问题,研究团队通过一架小型无人机在中国某城市拍摄了三个繁忙且有信号控制的路口,建立了名为 FLUID 的新数据集。在超过五小时的视频中,他们跟踪了两万多名道路使用者,涵盖汽车、卡车、摩托车、电动二轮和行人等。从100到120米的垂直俯视角,无人机能够看到路口的所有移动情况,而不会像路边摄像或测试车辆那样分散驾驶者注意力。这个鸟瞰视角使团队得以追踪谁让行、谁强行通过,以及不同交通流何时相距危险地接近。
从成千上万的运动中提取意义
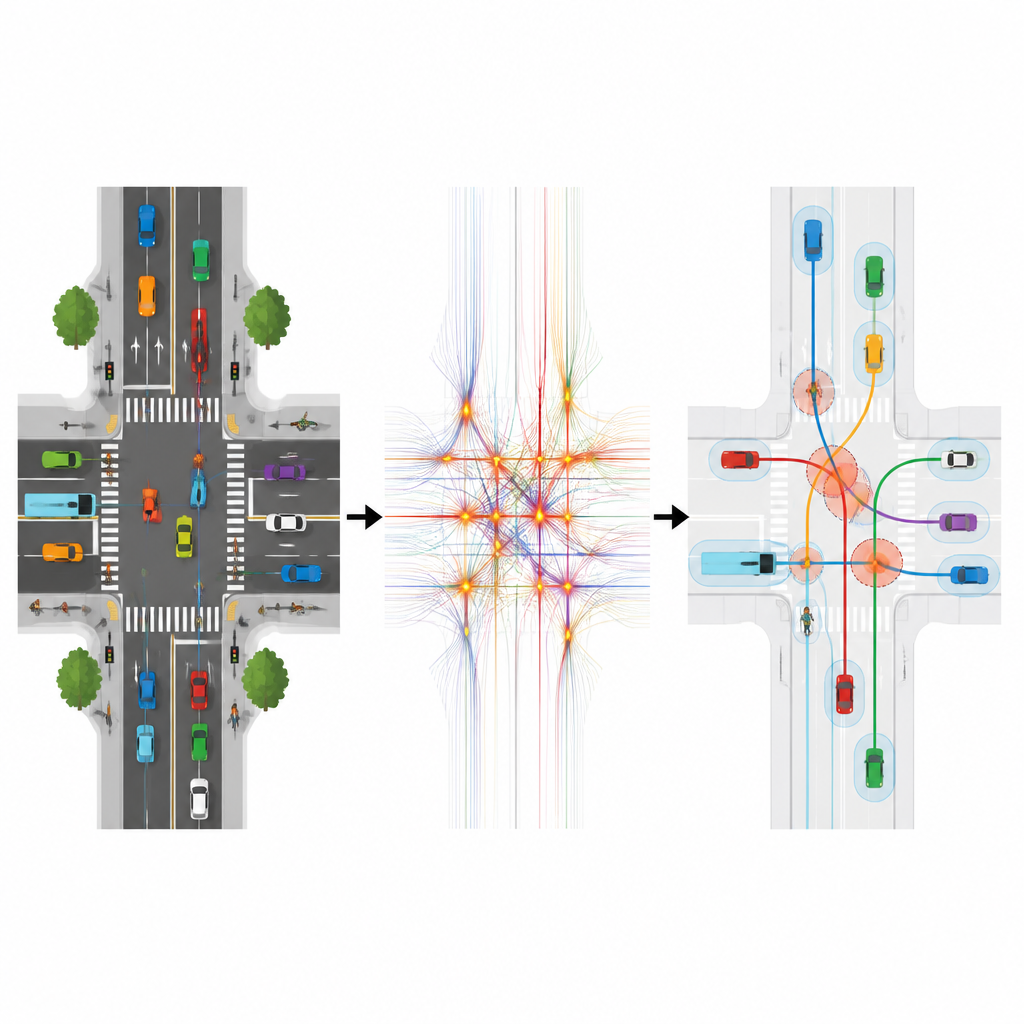
收集原始视频只是第一步;将其转化为每个道路使用者的精确轨迹才是真正的挑战。团队设计了一个轻量级的数字处理流程,先在帧中检测每个行人或车辆,将这些检测结果连接成连续的轨迹,然后将屏幕坐标转换为地图上的真实世界坐标。他们结合了多种专用计算机视觉模型,以可靠捕捉到行人、助力车和三轮车等小且不易察觉的目标。随后使用跟踪方法将这些检测拼接为平滑路径,额外的处理则去除相机抖动、填补短暂缺失并过滤掉诸如同一车辆出现重复框这种明显错误。
从轨迹到冲突与风险
有了干净的轨迹数据后,研究者便能识别最重要的事件:即两个车辆或车辆与弱势道路使用者在时空上接近的冲突。他们使用诸如若双方都不改变路线则在多长时间内可能发生碰撞等时间度量,标记出数千次此类高风险交互,并将其归类为追尾、擦碰、角碰和迎面相撞等模式。FLUID 的路口平均每分钟出现 2.8 次车辆冲突,约有 15% 的机动车至少参与过一次冲突,这远高于许多现有的无人机数据集。数据还包含关于信号相位与转向动作的详细信息,从而可以将高风险事件关联到具体的绿灯、黄灯和红灯阶段,并识别闯红灯等违规行为。
核验精度并共享完整素材
由于安全研究依赖于精确的位置和速度,团队对数据精度进行了仔细核验。他们将 FLUID 的结果与一款流行的商业分析工具以及一辆配备专业接收器的测试车所提供的高精度卫星测量进行了比较。测试车在 FLUID 数据中的位置与地面实测值相差约一米,系统很少出现丢失或误识别对象。有趣的是,作者发现将视频以略低的帧率分析有助于平滑速度估计中的噪声,而不会丢失重要行为。与许多早期项目不同,他们不仅发布了处理后的轨迹,还公开了经匿名化的视频、地图、信号时序和每一步处理的清晰文档。
这对日常交通意味着什么
对非专业人士而言,FLUID 可以被视为繁忙路口生活的超高细节延时记录:每辆车与每名行人的路径都被描绘,每次近失误都被记录。通过捕捉密集且真实的冲突并将其与信号、转向和违规行为关联,该数据集为交通工程师、城市规划者和自动驾驶开发者提供了一个强大的测试沙盒。它可以支持研究谁通常让行、不同信号方案如何影响安全、骑行者和行人如何应对风险,以及计算机控制的车辆在混合交通中应如何表现。简言之,这项工作提供了一个清晰、开放且注释丰富的视角,展现真实路口的运行方式,帮助未来的系统在许多事故易发之处减少危险与延误。
引用: Chen, Y., Wu, Z., Zheng, G. et al. A Fine-Grained Lightweight Urban Signalized-Intersection Dataset of Dense Conflict Trajectories. Sci Data 13, 766 (2026). https://doi.org/10.1038/s41597-026-07110-9
关键词: 交通轨迹, 城市路口, 无人机数据集, 交通安全, 自动驾驶