Clear Sky Science · nl
Een fijnmazige lichtgewicht dataset van stedelijke verkeerslichten-kruispunten met dicht opeenliggende conflicttrajecten
Waarom drukke stadskruisingen ertoe doen
Wie ooit bij een druk stadskruispunt heeft gewacht, weet hoe chaotisch het kan aanvoelen: auto’s, bussen, fietsen en voetgangers proberen allemaal tegelijk te bewegen. Deze studie stelt een simpele vraag: hoe kunnen we echt begrijpen wat er gebeurt in die momenten van bijna-aanrijdingen en plots remmen, zodat ingenieurs en toekomstige zelfrijdende auto’s kruispunten veiliger en vloeiender kunnen maken voor iedereen?
Verkeer bekijken vanuit de lucht
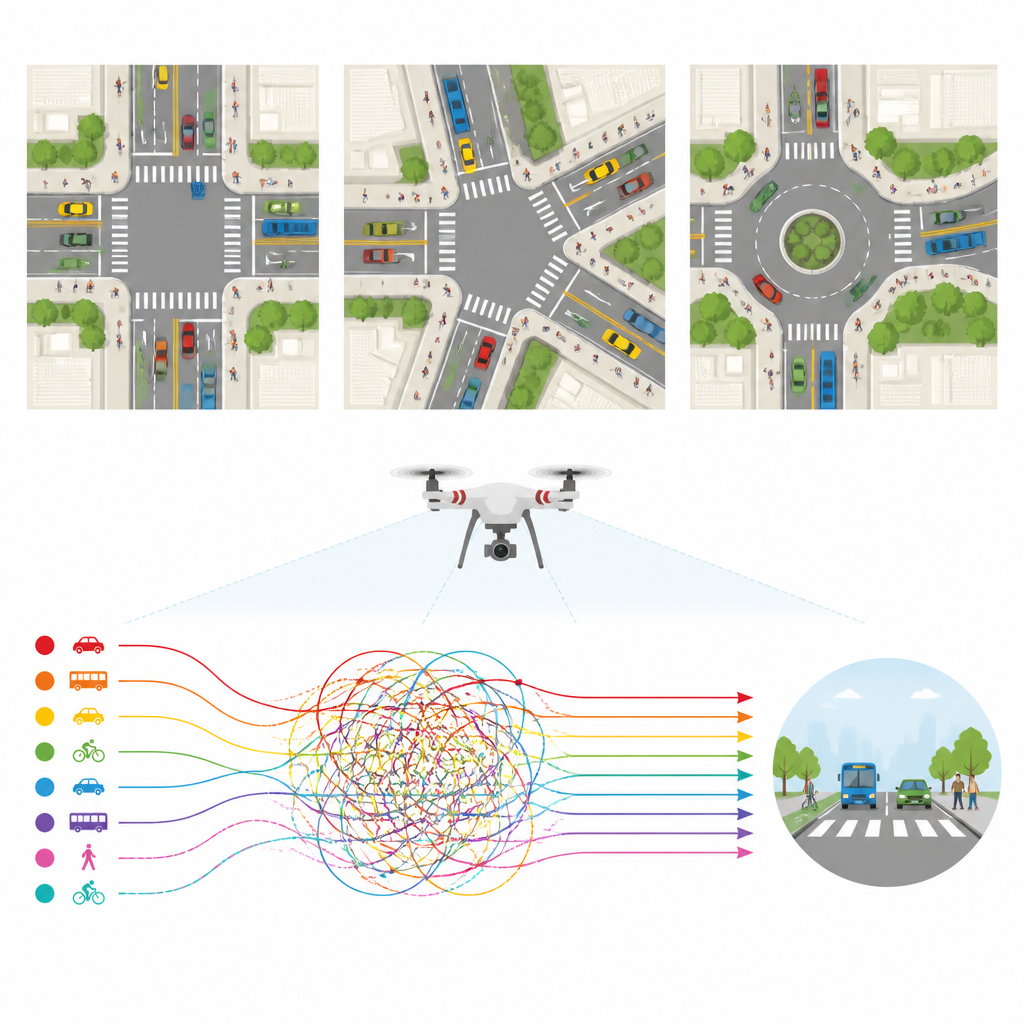
Om dat te onderzoeken bouwden de onderzoekers een nieuwe dataset genaamd FLUID door drie drukke gereguleerde kruispunten in een Chinese stad te filmen met een kleine drone. Uit meer dan vijf uur video volgden ze meer dan 20.000 weggebruikers, van auto’s en vrachtwagens tot snorfietsen en voetgangers. Recht naar beneden kijkend vanaf 100 tot 120 meter hoogte kon de drone elke beweging over het hele kruispunt zien, zonder bestuurders af te leiden met zichtbare wegcamera’s of testvoertuigen. Dit vogelperspectief maakte het mogelijk te volgen wie voorrang gaf, wie doordrong, en wanneer verschillende stromen gevaarlijk dicht bij elkaar kwamen.
Duizenden bewegingen begrijpen
Het verzamelen van ruwe video is slechts de eerste stap; daarvan precieze paden maken voor elke weggebruiker is de echte uitdaging. Het team ontwierp een lichte digitale pijplijn die elke persoon of elk voertuig in de frames detecteert, die detecties koppelt tot doorlopende trajecten en schermposities omzet in coördinaten op een kaart. Ze combineerden meerdere gespecialiseerde computer vision-modellen zodat kleine en moeilijk te zien objecten zoals voetgangers, snorfietsen en driewielers betrouwbaar werden opgepikt. Een trackingmethode naait deze detecties vervolgens aan elkaar tot vloeiende paden, terwijl extra verwerking cameratrilling verwijderde, korte gaten opvulde en duidelijke fouten zoals dubbele kaders rond hetzelfde voertuig eruit filterde.
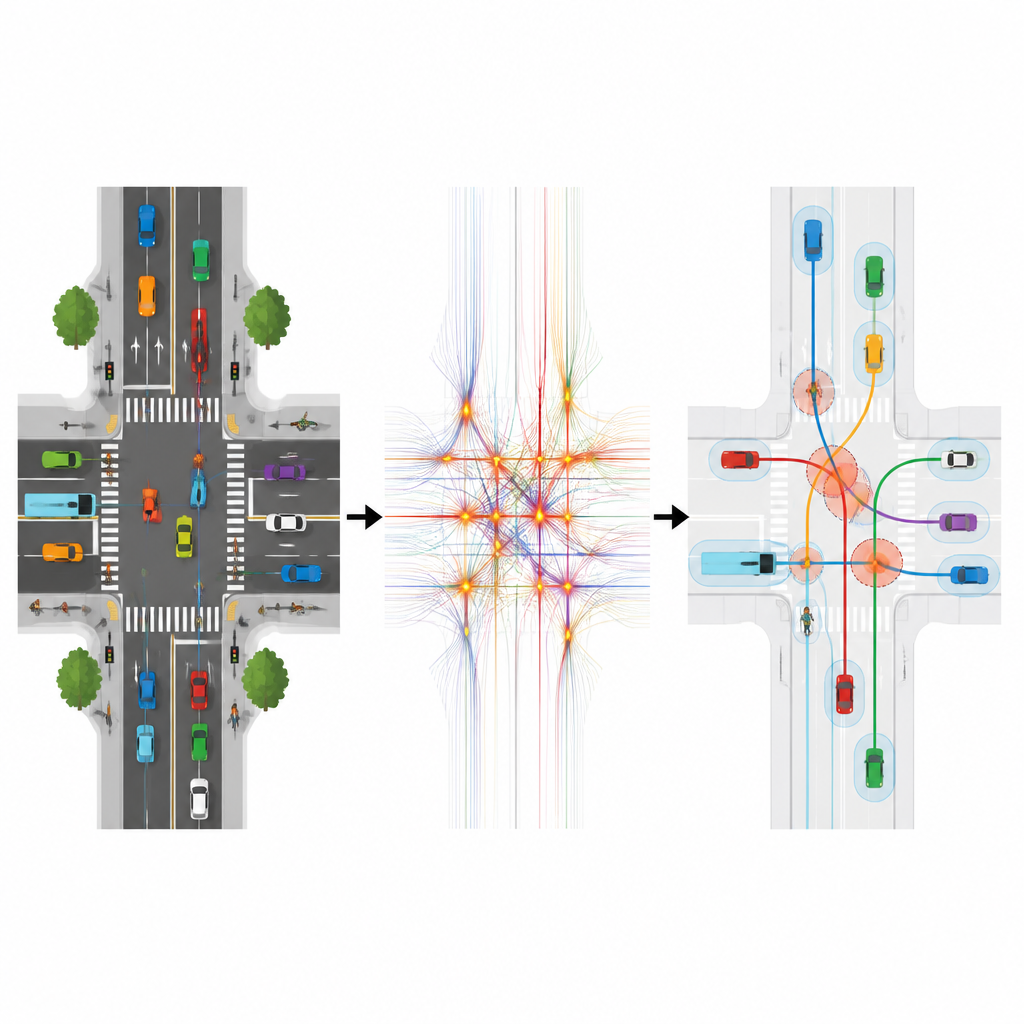
Van paden naar conflicten en risico
Met schone trajecten konden de onderzoekers zoeken naar de belangrijkste gebeurtenissen: conflicten waarbij twee voertuigen of een voertuig en een kwetsbare weggebruiker dicht in ruimte en tijd langs elkaar gaan. Met timingmaatregelen, zoals hoeveel tijd er resteert tot een waarschijnlijke botsing als geen van beide partijen van koers verandert, markeerden ze duizenden zulke risicovolle interacties en groepeerden die in achteropkomende, zijdelingse aanraking, hoek- en frontale patronen. De kruispunten in FLUID lieten gemiddeld 2,8 voertuigconflicten per minuut zien, en ongeveer 15 procent van alle motorvoertuigen was bij ten minste één conflict betrokken, veel hoger dan in veel bestaande drone-datasets. De data bevatten ook gedetailleerde informatie over signaalfasen en afslaande manoeuvres, waardoor het mogelijk is risicovolle gebeurtenissen te koppelen aan specifieke groen-, geel- en roodfases en om door rood rijden en andere overtredingen te detecteren.
Nauwkeurigheid controleren en het volledige plaatje delen
Aangezien veiligheidsstudies afhangen van nauwkeurige posities en snelheden, controleerde het team zorgvuldig hoe accuraat hun data waren. Ze vergeleken de resultaten van FLUID met die van een populair commercieel analysetool en met hoogprecisie satellietmetingen van een testauto uitgerust met een specialistische ontvanger. De posities van die testauto in de FLUID-data lagen binnen ongeveer een meter van de grondwaarheid, en het systeem verloor of identificeerde objecten zelden verkeerd. Interessant genoeg vonden de auteurs dat het analyseren van video met een iets verlaagde framerate hielp om ruis in snelheidsschattingen glad te strijken zonder belangrijk gedrag te verliezen. In tegenstelling tot veel eerdere projecten publiceren zij niet alleen verwerkte trajecten, maar ook de geanonimiseerde video’s, kaarten, signaaltijden en duidelijke documentatie van elke verwerkingsstap.
Wat dit betekent voor het dagelijks verkeer
Voor niet-experts kan FLUID worden gezien als een ultragedetailleerde time-lapse van het leven bij drukke kruispunten, waarin elk auto- en voetgangerstraject is uitgezet en elke bijna-aanrijding is vastgelegd. Door dichte, realistische conflicten vast te leggen en die te koppelen aan signalen, bochten en overtredingen, biedt de dataset verkeerskundigen, stedelijke planners en ontwikkelaars van autonome voertuigen een krachtig speelveld om ideeën te testen. Het kan studies ondersteunen over wie doorgaans voorrang verleent, hoe verschillende signaalplannen de veiligheid beïnvloeden, hoe fietsers en voetgangers risico’s navigeren en hoe computerbestuurde auto’s zich behoren te gedragen in gemengd verkeer. Kort gezegd levert het werk een helder, open en rijk geannoteerd beeld van hoe echte kruispunten werken, en helpt het toekomstige systemen gevaar en vertraging te verminderen op plekken waar veel ongevallen nu beginnen.
Bronvermelding: Chen, Y., Wu, Z., Zheng, G. et al. A Fine-Grained Lightweight Urban Signalized-Intersection Dataset of Dense Conflict Trajectories. Sci Data 13, 766 (2026). https://doi.org/10.1038/s41597-026-07110-9
Trefwoorden: verkeerstrajecten, stedelijke kruispunten, drone-dataset, verkeersveiligheid, autonoom rijden