Clear Sky Science · es
Un conjunto de datos urbano señalizado, ligero y de alta resolución de trayectorias de conflicto densas
Por qué importan los cruces concurridos de la ciudad
Cualquiera que haya esperado en una intersección urbana llena sabe lo caótico que puede sentirse: coches, autobuses, bicicletas y peatones intentando moverse a la vez. Este estudio plantea una pregunta sencilla: ¿cómo podemos entender realmente lo que ocurre en esos momentos de casi accidentes y frenazos bruscos, para que los ingenieros y los futuros vehículos autónomos puedan hacer las intersecciones más seguras y fluidas para todos?
Vigilar el tráfico desde el cielo
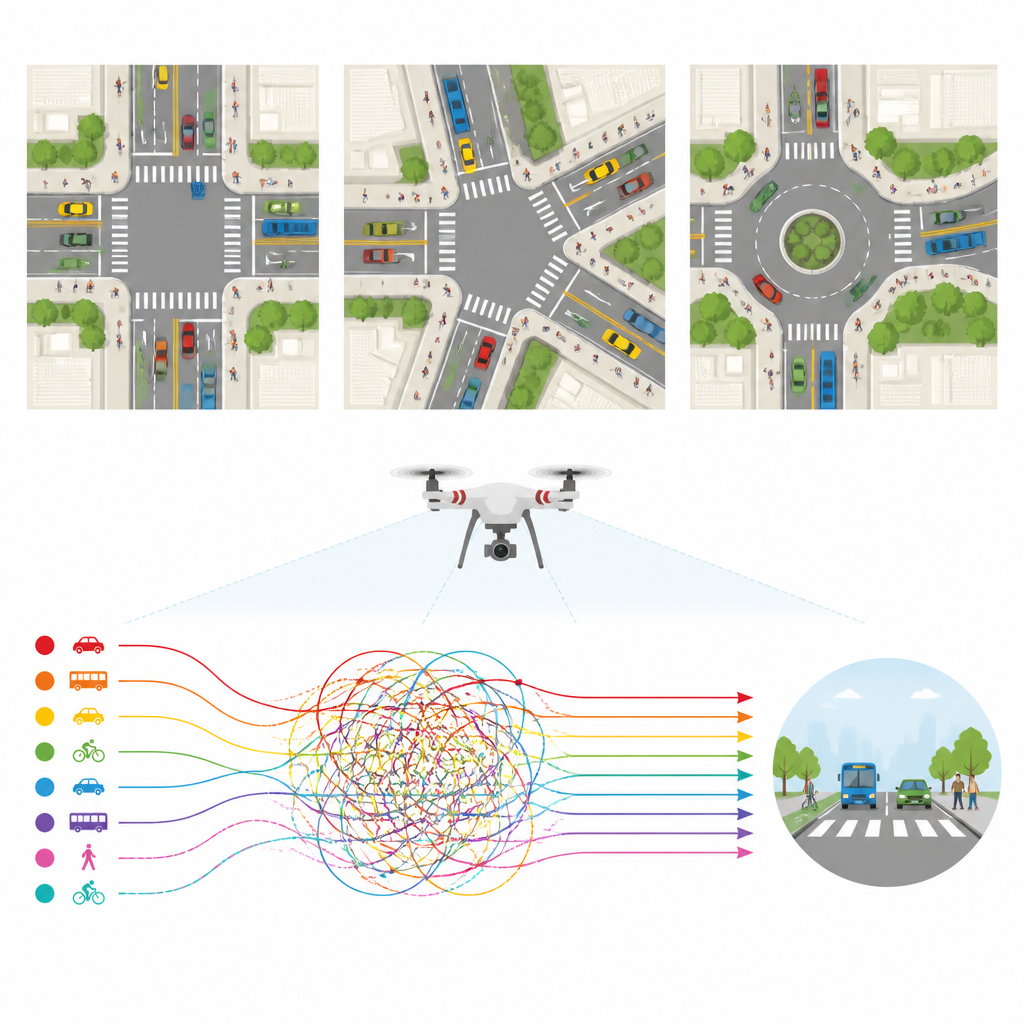
Para responder a esto, los investigadores construyeron un nuevo conjunto de datos llamado FLUID filmando tres intersecciones señalizadas y concurridas en una ciudad china con un pequeño dron. A partir de más de cinco horas de vídeo, siguieron a más de 20.000 usuarios de la vía, desde coches y camiones hasta ciclomotores y peatones. Viendo desde arriba, a 100–120 metros de altura, el dron pudo observar cada movimiento en toda la intersección, sin distraer a los conductores con cámaras visibles en la calzada o vehículos de prueba. Esta vista de pájaro les permitió seguir quién cedía, quién se colaba y cuándo distintas corrientes de tráfico quedaban peligrosamente cerca.
Dar sentido a miles de movimientos
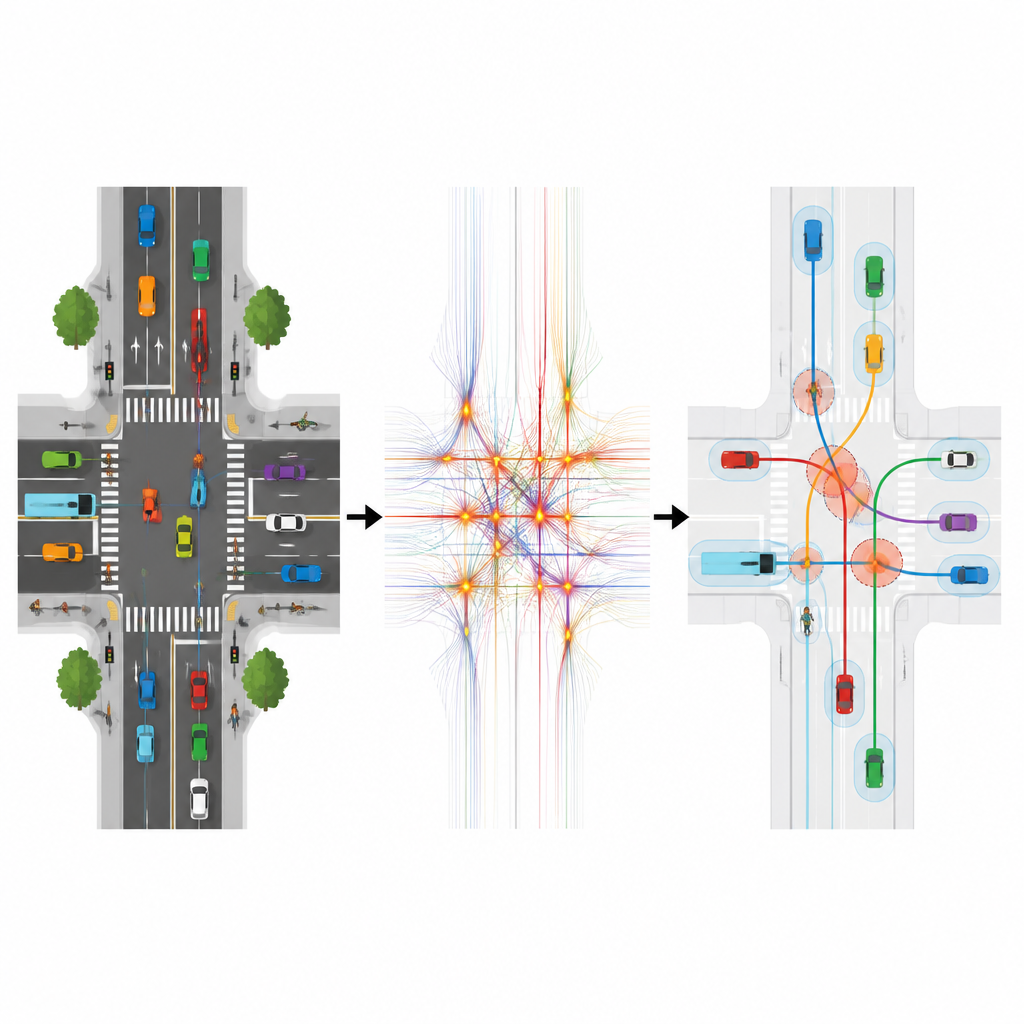
Recoger vídeo bruto es solo el primer paso; convertirlo en rutas precisas para cada usuario es el verdadero desafío. El equipo diseñó una canalización digital ligera que detecta a cada persona o vehículo en los fotogramas, enlaza esas detecciones en trayectorias continuas y luego convierte las posiciones en pantalla a coordenadas reales sobre el mapa. Combinó varios modelos de visión por ordenador especializados para que objetos pequeños y difíciles de ver, como peatones, ciclomotores y triciclos, fuesen detectados de forma fiable. Un método de seguimiento ensambló estas detecciones en trayectorias suaves, mientras que un procesamiento adicional eliminó el temblor de la cámara, rellenó breves huecos y filtró errores evidentes como cajas duplicadas alrededor del mismo vehículo.
De las trayectorias a los conflictos y el riesgo
Con trayectorias limpias en mano, los investigadores pudieron buscar los eventos más importantes: conflictos donde dos vehículos o un vehículo y un usuario vulnerable se acercan en espacio y tiempo. Usando medidas temporales como el tiempo restante antes de una colisión probable si ninguna de las partes cambia de rumbo, marcaron miles de interacciones riesgosas y las agruparon en patrones de alcance por detrás, roce lateral, ángulo y frontal. Las intersecciones de FLUID mostraron un promedio de 2,8 conflictos entre vehículos por minuto, y alrededor del 15 % de todos los vehículos motorizados participaron en al menos un conflicto, mucho más que en muchos conjuntos de datos de drones existentes. Los datos también contienen información detallada sobre fases semafóricas y maniobras de giro, lo que permite conectar eventos riesgosos con fases verdes, amarillas y rojas específicas y detectar saltos de semáforo y otras infracciones.
Comprobando la precisión y compartiendo la imagen completa
Porque los estudios de seguridad dependen de posiciones y velocidades precisas, el equipo verificó cuidadosamente la exactitud de sus datos. Compararon los resultados de FLUID con los de una herramienta comercial de análisis popular y con mediciones por satélite de alta precisión obtenidas con un coche de prueba equipado con un receptor especializado. Las posiciones de ese coche de prueba en los datos FLUID estuvieron dentro de aproximadamente un metro de la verdad de terreno, y el sistema rara vez perdía u confundía objetos. Curiosamente, los autores observaron que analizar el vídeo a una tasa de imágenes ligeramente reducida ayudaba a suavizar el ruido en las estimaciones de velocidad sin perder comportamientos importantes. A diferencia de muchos proyectos anteriores, además de publicar las trayectorias procesadas, también hacen públicos los vídeos anonimizados, mapas, temporizaciones de los semáforos y documentación clara de cada paso del procesamiento.
Qué significa esto para el tráfico cotidiano
Para quienes no son expertos, FLUID puede concebirse como un time-lapse ultradetallado de la vida en cruces concurridos, donde se traza cada trayectoria de coche y peatón y se registra cada casi accidente. Al capturar conflictos densos y realistas y vincularlos a señales, giros e infracciones, el conjunto de datos ofrece a ingenieros de tráfico, planificadores urbanos y desarrolladores de vehículos autónomos un potente entorno para probar ideas. Puede apoyar estudios sobre quién suele ceder, cómo distintos planes semafóricos afectan a la seguridad, cómo bicicletas y peatones gestionan el riesgo y cómo deben comportarse los coches conducidos por ordenador en tráfico mixto. En resumen, el trabajo ofrece una visión clara, abierta y ricamente anotada de cómo funcionan las intersecciones reales, ayudando a que los futuros sistemas reduzcan el peligro y la demora donde hoy comienzan muchos choques.
Cita: Chen, Y., Wu, Z., Zheng, G. et al. A Fine-Grained Lightweight Urban Signalized-Intersection Dataset of Dense Conflict Trajectories. Sci Data 13, 766 (2026). https://doi.org/10.1038/s41597-026-07110-9
Palabras clave: trayectorias de tráfico, intersecciones urbanas, conjunto de datos de drones, seguridad vial, conducción autónoma