Clear Sky Science · tr
Çok kesişmeli ağlarda işbirlikçi yönetim ve merkeziyetsiz karar alma için grafik dönüştürücü Q-ağı
Daha akıllı trafik ışıkları neden önemli
Bir şehirde araba kullanan herkes, yol açık görünse bile peş peşe kırmızı ışıklara takılmanın yarattığı hayal kırıklığını bilir. Bu dur-kalk dalgaları yalnızca sinir bozucu olmakla kalmaz: zaman kaybettirir, yakıt tüketir ve kuyruklar birkaç kavşağı geriye doğru taşındığında bütün koridorları kilitleyebilir. Bu çalışma, trafik ışıklarının birbirleriyle “konuşmasını” sağlayarak, trafik öngörülemez olsa ve yol ağı büyük ile karmaşık olsa bile yeşil dalgalarının uzun mesafelerde daha güvenilir oluşmasını sağlayan yeni bir yaklaşımı inceliyor.
Şehir sokaklarının ağa dönüşmesi
Araştırmacılar önce kentsel yol sistemini bağlantılı noktalar ağı olarak ele alıyor. Her kavşak bir düğüm, aralarındaki her yol ise bir bağlantı olarak modelleniyor. Her sinyal kontrolörü yalnızca yerel sensörlerin bildirdiğini görür: kaç aracın beklediği, ne kadar süredir geciktikleri ve hangi fazın şu anda yeşil olduğu gibi. Hiçbir kontrolör şehrin tamamını anlık olarak bilemez; yine de her ışık değişikliği, daha sonra diğer kavşaklara ulaşacak trafiği etkiler. Zorluk, bu yerel kontrolörlerin işbirliği yapmasını sağlayarak araçların koridor boyunca mümkün olduğunca az gereksiz duraklama ile ilerlemesini sağlamak, aynı zamanda yan yolları ve dönüş trafiğini hizmette tutmaktır.
Işıkları adım adım işbirliğine öğretmek
Elle hazırlanmış zamanlama planları yerine yazarlar, bir trafik simülatöründe eylemleri deneyip sonuçları gözlemleyerek öğrenen takviyeli öğrenmeyi kullanıyor. Her kavşak, hangi fazın sonraki gösterileceğini ve ne kadar süreyle gösterileceğini seçen bir ajan gibi davranıyor. Ana yenilik, her anda hangi komşu kavşakların en önemli olduğunu belirleyen Grafik Dönüştürücü Q-Ağı (Graph Transformer Q-Network, GTQN) adlı bir yöntemdir. Bu iki aşamada çalışır: önce etkili olabilecek yukarı veya aşağı yöndeki küçük bir komşu setini seçer, sonra her birine mevcut trafik durumuna göre bir etki gücü atar. Bu, kontrolörün kendi trafiği üzerinde fazla etkisi olmayan uzak düğümlerden gelen gürültülü bilgilerle bunalmamasını önler.
Alan ve zamanda trafiği izlemek
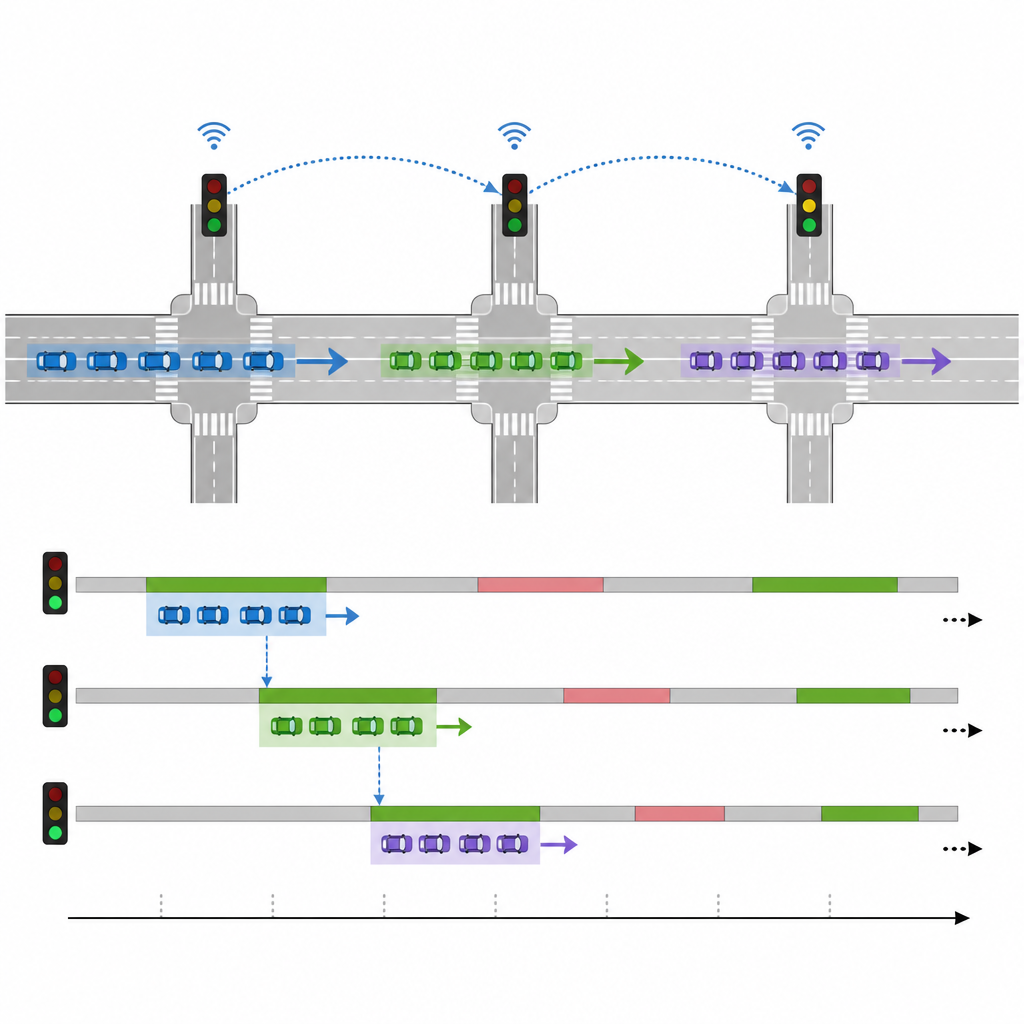
Akıcı bir yeşil dalga oluşturmak için bir sinyal, birkaç kavşak ötedeki ve gelmesi onlarca saniye alabilecek araçları önceden tahmin etmelidir. GTQN bunu, ağın düzenine ilişkin bilgileri zaman içindeki koşulların kaydıyla birleştirerek ele alır. Başlangıçta dil modellerinde popülerleşen bir dönüştürücü (transformer) modülü, her kavşakta son geçmişe bakıp mevcut karar için hangi geçmiş anların önemli olduğunu seçmekte kullanılır. Aynı zamanda bir grafik modülü kavşaklar arasındaki bağlantılar üzerinde muhakeme yapar. Alanı ve zamanı tek bir modelde birleştirerek sistem, araç platolarının bir koridor boyunca nasıl hareket ettiğini ve yeşillerin gelişleriyle en iyi nasıl hizalanacağını öğrenebilir.
Tek bir köşenin ötesine hedef koymak
Her trafik ışığı yalnızca kendi kuyruğunu boşaltmaya çalışsaydı, genel koridor performansı kötü olabilir. Örneğin, aşağı yöndeki bir sinyal, yukarıdan gelen bir araç grubunun durmadan geçmesine izin verecek bir yeşil fazı kısaltabilir. Bunu önlemek için yazarlar iki seviyeli bir hedef tasarlıyor. Her kavşak hâlâ kendi kuyruklarını ve bekleme sürelerini azaltmak için ödüllendirilirken, merkezi bir eğitim sinyali de giriş noktasından salındıktan sonra ana koridor boyunca seyahat eden araçların yaşadığı ekstra duraklamaları cezalandırıyor. Eğitim sırasında merkezi bir “yönetim” modülü bu koridor-geneli skoru öğrenmeyi yönlendirmek için kullanıyor. Eğitimden sonra öğrenilmiş kontrolörler yerel olarak hareket ediyor ve yalnızca seçilmiş komşularıyla seyrek, hedefe yönelik mesajlar paylaşıyor.
Simülasyonlar ne gösteriyor
Ekip, GTQN’i hem sentetik ızgaraların hem de Çin’in Chengdu kentinden gerçek bir şehir ağının ayrıntılı simülasyonlarında, 100 kavşağın bulunduğu bir sistemi de içerecek şekilde test ediyor. Birkaç gelişmiş çoklu-ajan kontrol yöntemine kıyasla GTQN, araçların durmak zorunda kalma sıklığını azaltıyor, bekleme sürelerini kısaltıyor ve kuyrukların yukarı yönlü kavşakları engelleyecek kadar büyümesini önlüyor. Ayrıca kavşaklar arasındaki bazı mesajların gecikmesi veya kaybolması durumunda makul performansı sürdürüyor; bu, gerçek iletişim ağları için önemli bir özellik. Dikkatli sönümleme (ablation) çalışmaları tasarımın her unsurunun önemli olduğunu gösteriyor: öğrenilmiş seyreklik, birleşik alan-zaman modeli ve merkezi eğitim sinyali hepsi sağlam koordinasyona katkıda bulunuyor.
Günlük yolculuklar için ne anlama geliyor
Sürücüler, bisikletliler ve otobüs yolcuları için bu çalışmanın ardındaki fikir basit: her trafik ışığının izole şekilde çalışması yerine, bir koridor boyunca sinyaller birbirlerini öngörmeyi ve araç gruplarının hareketini korumayı öğrenir. Yüksek doğruluklu simülasyonlarda bu, daha az duraklama, daha kısa kuyruklar ve yoğun güzergâhlar boyunca daha istikrarlı seyir hızlarına yol açıyor. Çalışma hâlâ sanal bir ortamla sınırlı ve henüz yayalar, toplu taşıma önceliği veya gerçek dünya donanımının tüm tuhaflıklarını ele almıyor olsa da, çok sayıda yerel kontrolör arasında dikkatle tasarlanmış işbirliğinin kaotik kırmızı ışık dizisini daha öngörülebilir ve verimli bir yolculuğa dönüştürebileceğini gösteriyor.
Atıf: Zhang, H. Graph transformer Q-network for collaborative governance and decentralized decision-making in multi-intersection networks. Sci Rep 16, 15549 (2026). https://doi.org/10.1038/s41598-026-45895-2
Anahtar kelimeler: trafik sinyal kontrolü, çoklu ajan takviyeli öğrenme, grafik dönüştürücü, koridor ilerlemesi, akıllı ulaşım