Clear Sky Science · pl
Sieciowa sieć transformera Q dla współpracy w zarządzaniu i zdecentralizowanego podejmowania decyzji w wieloprzecięciowych sieciach
Dlaczego mądrzejsze sygnalizacje świetlne są ważne
Każdy, kto jeździ po mieście, zna frustrację związaną z przejeżdżaniem od czerwonego światła do czerwonego, nawet gdy droga wydaje się pusta. Te fale hamowania i przyspieszania to nie tylko irytacja: marnują czas, paliwo i mogą zablokować całe korytarze, gdy kolejki cofną się przez kilka skrzyżowań. W badaniu autorzy przyglądają się nowemu sposobowi umożliwiającemu „komunikację” świateł ze sobą, tak aby zielone fale powstawały bardziej niezawodnie na długich odcinkach, nawet gdy ruch jest nieprzewidywalny, a sieć drogowa duża i złożona.
Jak ulice miasta stają się siecią
Naukowcy zaczynają od potraktowania miejskiego układu drogowego jako sieci połączonych punktów. Każde skrzyżowanie to węzeł, a każda łącząca je droga to krawędź. Każdy sterownik sygnalizacji widzi tylko to, co raportują lokalne czujniki: ile samochodów czeka, jak długo są opóźnione i która faza jest aktualnie zielona. Żaden sterownik nie dysponuje pełnym obrazem miasta naraz, a jednak każda zmiana świateł wpływa na ruch, który dotrze do innych węzłów później. Wyzwanie polega na tym, by umożliwić tym lokalnym sterownikom współpracę, tak aby pojazdy mogły przejeżdżać korytarzem przy możliwie najmniejszej liczbie niepotrzebnych zatrzymań, jednocześnie obsługując boczne ulice i skręcający ruch.
Nauka współpracy świateł krok po kroku
Zamiast ręcznie opracowanych planów czasowych, autorzy wykorzystują uczenie przez wzmacnianie, gdzie algorytm uczy się, próbując działań w symulatorze ruchu i obserwując rezultaty. Każde skrzyżowanie działa jak agent, który wybiera, jaką fazę pokazać dalej i na jak długo. Kluczową innowacją jest metoda nazwana Grafowa Sieć Transformera Q, czyli GTQN, która decyduje, które sąsiednie skrzyżowania mają w danym momencie największe znaczenie. Działa to w dwóch etapach: najpierw wybiera mały zestaw wpływowych sąsiadów z górnego lub dolnego biegu, a następnie przypisuje każdemu z nich siłę wpływu w oparciu o aktualny stan ruchu. Zapobiega to przytłoczeniu kontrolera hałaśliwymi informacjami z odległych węzłów, które mają niewielki wpływ na jego własny ruch.
Śledzenie ruchu w przestrzeni i czasie
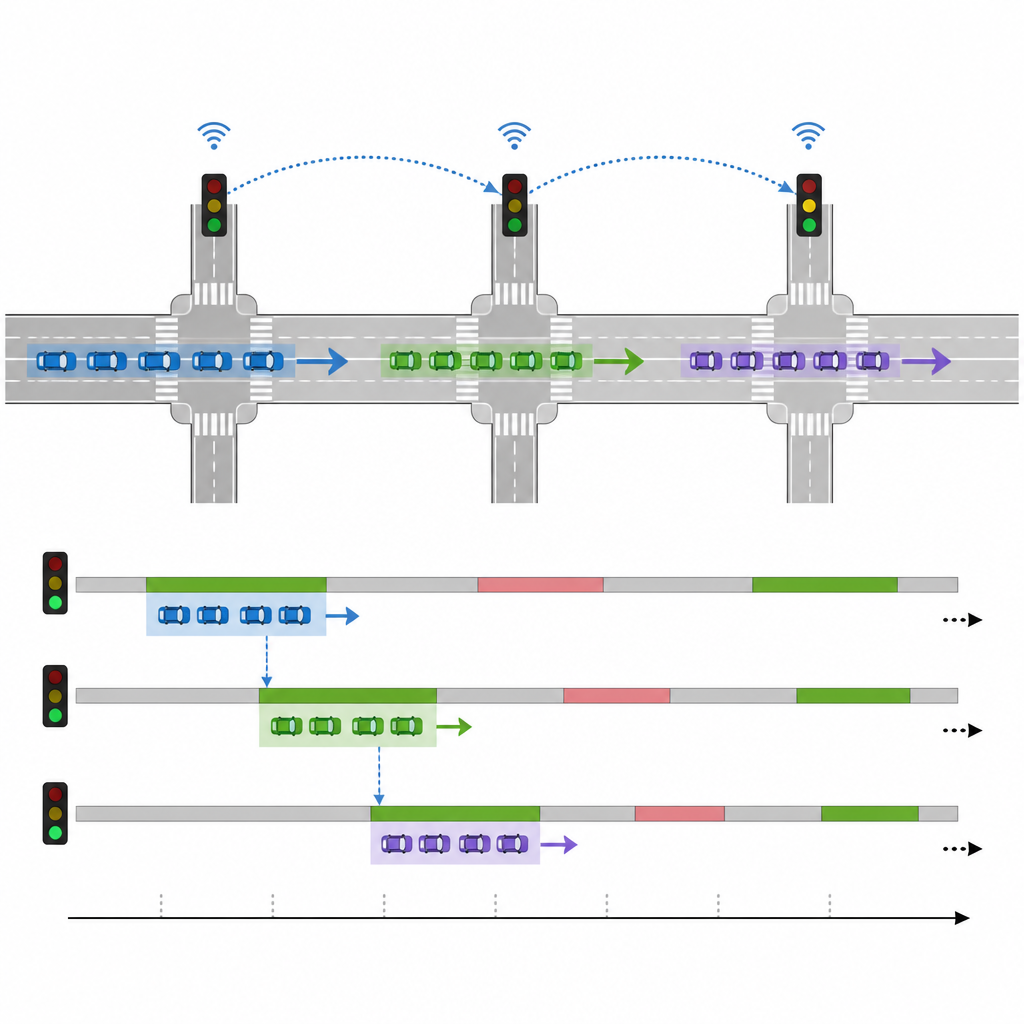
Aby utworzyć płynną zieloną falę, sygnał musi przewidywać samochody wypuszczone kilka skrzyżowań wcześniej, które mogą potrzebować wielu sekund, by dotrzeć. GTQN rozwiązuje to, łącząc informacje o układzie sieci z zapisem zmian warunków w czasie. Moduł transformera, znany z modeli językowych, jest używany do spojrzenia wstecz na ostatnią historię każdego skrzyżowania i wyłonienia tych przeszłych momentów, które mają znaczenie dla bieżącej decyzji. Jednocześnie moduł grafowy rozumuje nad połączeniami między skrzyżowaniami. Poprzez połączenie przestrzeni i czasu w jednym modelu system uczy się, jak grupy pojazdów (platoony) przemieszczają się wzdłuż korytarza i jak najlepiej zsynchronizować zielone światła z ich przyjazdem.
Wyznaczanie celów wykraczających poza jedno skrzyżowanie
Gdyby każde światło próbowało tylko opróżnić swoją własną kolejkę, cały korytarz mógłby działać słabo. Na przykład sygnał położony dalej mógłby skrócić fazę zielonego, która pozwoliłaby grupie samochodów nadjeżdżających z góry przejechać bez zatrzymania. Aby temu zapobiec, autorzy projektują dwupoziomowy cel. Każde skrzyżowanie nadal jest nagradzane za zmniejszanie własnych kolejek i czasów oczekiwania, ale centralny sygnał treningowy karze dodatkowe zatrzymania doświadczane przez pojazdy podróżujące głównym korytarzem po ich opuszczeniu punktu wejścia. Podczas treningu scentralizowany moduł „zarządzania” używa tego wskaźnika obejmującego cały korytarz do kierowania uczeniem. Po treningu wyuczeni kontrolerzy działają lokalnie i wymieniają tylko oszczędne, ukierunkowane komunikaty z wybranymi sąsiadami.
Co pokazują symulacje
Zespół testuje GTQN w szczegółowych symulacjach zarówno dla syntetycznych siatek, jak i rzeczywistej sieci miejskiej z Chengdu w Chinach, w tym systemu z 100 skrzyżowaniami. W porównaniu z kilkoma zaawansowanymi metodami sterowania wielooagentowego, GTQN zmniejsza częstotliwość zatrzymań pojazdów, skraca czasy oczekiwania i zapobiega wzrostowi kolejek do rozmiarów blokujących skrzyżowania pochodzące z góry. Utrzymuje też rozsądną wydajność, gdy niektóre komunikaty między skrzyżowaniami są opóźnione lub zgubione, co jest ważną cechą dla rzeczywistych sieci komunikacyjnych. Dokładne badania ablaacyjne pokazują, że każdy element projektu ma znaczenie: uczona rzadkość, połączony model przestrzenno‑czasowy i scentralizowany sygnał treningowy wszystkie przyczyniają się do odpornej koordynacji.
Co to oznacza dla codziennych podróży
Dla kierowców, rowerzystów i pasażerów autobusów idea stojąca za tą pracą jest prosta: zamiast aby każde światło działało w izolacji, sygnały wzdłuż korytarza uczą się przewidywać swoje wzajemne działania i chronić przejazd grup pojazdów. W symulacjach wysokiej dokładności prowadzi to do mniejszej liczby zatrzymań, krótszych kolejek i bardziej płynnych prędkości na zatłoczonych trasach. Choć badanie jest nadal ograniczone do środowiska wirtualnego i nie obejmuje jeszcze pieszych, priorytetu dla transportu publicznego ani wszystkich niuansów rzeczywistego sprzętu, pokazuje, że starannie zaprojektowana współpraca wielu lokalnych kontrolerów może zamienić chaotyczny ciąg czerwonych świateł w bardziej przewidywalną i wydajną podróż.
Cytowanie: Zhang, H. Graph transformer Q-network for collaborative governance and decentralized decision-making in multi-intersection networks. Sci Rep 16, 15549 (2026). https://doi.org/10.1038/s41598-026-45895-2
Słowa kluczowe: sterowanie sygnalizacją świetlną, wielooagentowe uczenie przez wzmacnianie, grafowy transformer, postęp na korytarzu, inteligentny transport