Clear Sky Science · fr
Réseau Q-transformer de graphes pour la gouvernance collaborative et la prise de décision décentralisée dans des réseaux multi-intersections
Pourquoi des feux intelligents comptent
Quiconque conduit en ville connaît la frustration d’enchaîner les feux rouges, même quand la route semble dégagée. Ces vagues d’arrêt-et-démarrage sont plus qu’une nuisance : elles font perdre du temps, gaspillent du carburant et peuvent paralyser des couloirs entiers lorsque les files débordent sur plusieurs intersections. Cette étude examine une nouvelle façon de faire « discuter » les feux entre eux afin que des ondes vertes se forment plus régulièrement sur de longs tronçons, même lorsque le trafic est imprévisible et que le réseau routier est vaste et complexe.
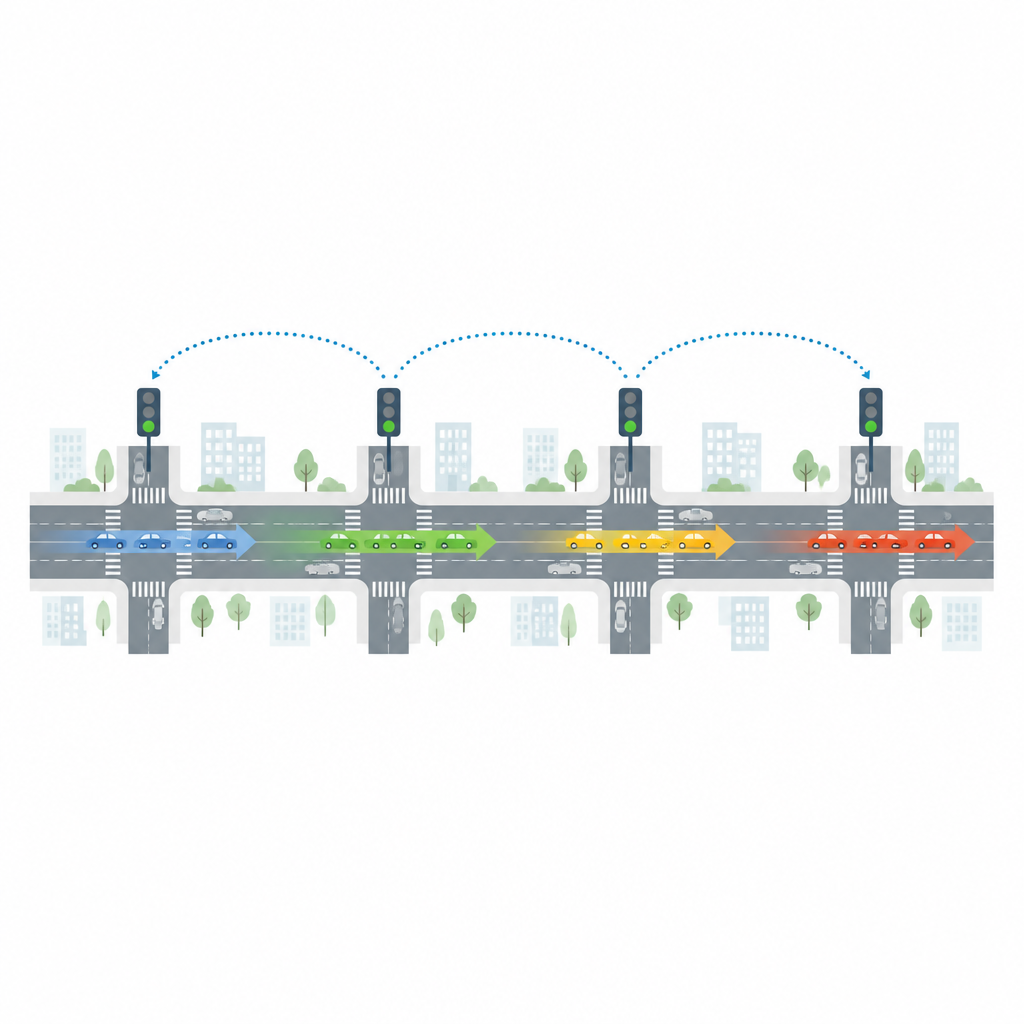
Comment les rues deviennent un réseau
Les chercheurs partent du principe que le système routier urbain peut se traiter comme un réseau de points connectés. Chaque intersection est un nœud et chaque route qui les relie est un lien. Chaque contrôleur de signal ne voit que ce que rapportent les capteurs locaux : combien de véhicules attendent, depuis combien de temps ils sont retardés et quelle phase est actuellement verte. Aucun contrôleur n’a une vue d’ensemble de la ville, pourtant chaque changement de feu affecte le trafic qui parviendra plus tard à d’autres jonctions. Le défi est de permettre à ces contrôleurs locaux de coopérer pour que les véhicules puissent traverser un couloir avec le moins d’arrêts inutiles possible, tout en desservant toujours les rues secondaires et les mouvements de tournant.
Apprendre aux feux à coopérer pas à pas
Plutôt que des plans de temporisation manuels, les auteurs utilisent l’apprentissage par renforcement, où un algorithme apprend en testant des actions dans un simulateur de trafic et en observant les résultats. Chaque intersection agit comme un agent qui choisit quelle phase afficher ensuite et pour combien de temps. L’innovation clé est une méthode appelée Graph Transformer Q-Network, ou GTQN, qui décide quelles intersections voisines importent le plus à chaque instant. Elle fonctionne en deux étapes : d’abord elle sélectionne un petit ensemble de voisins influents en amont ou en aval, puis elle attribue à chacun une force d’influence en fonction de l’état du trafic courant. Cela évite que le contrôleur soit submergé par des informations bruyantes provenant de nœuds éloignés qui ont peu d’effet sur son propre trafic.
Suivre le trafic dans l’espace et le temps
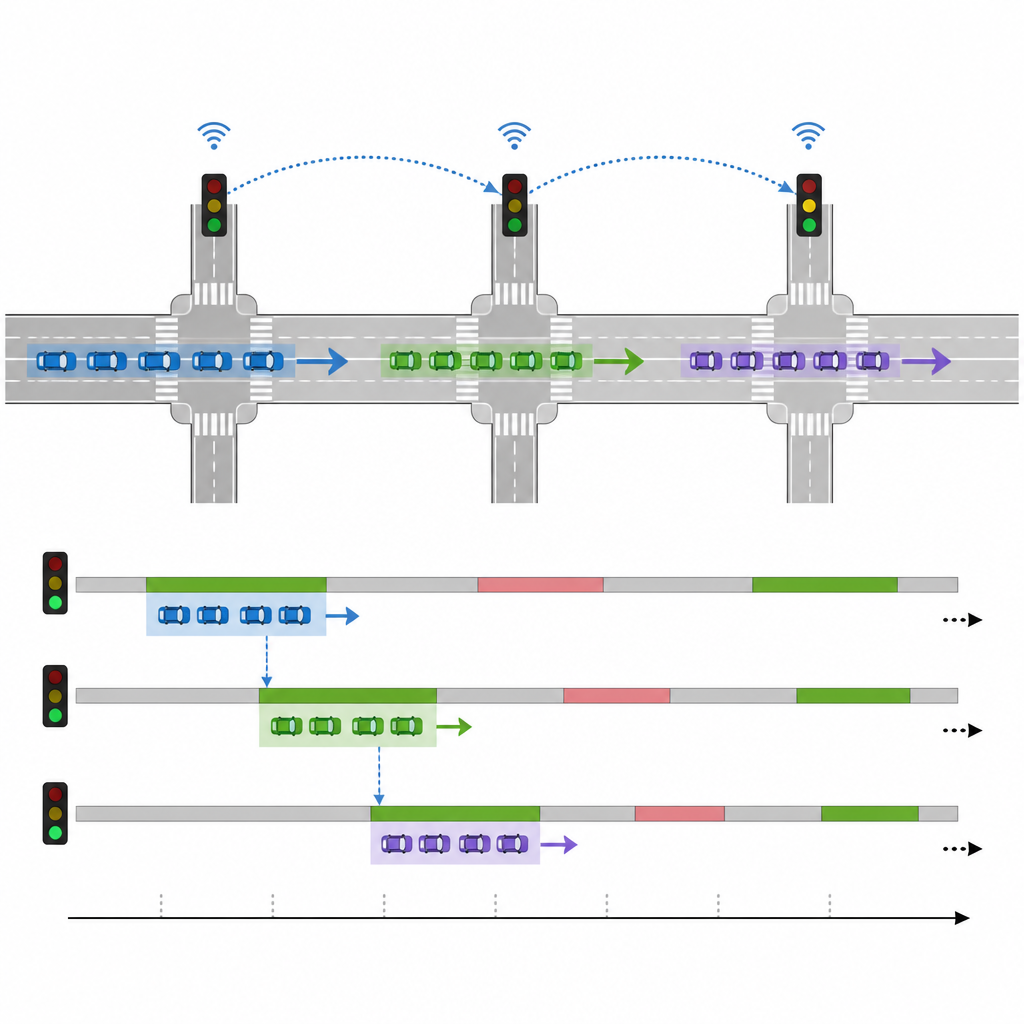
Pour créer une onde verte régulière, un signal doit anticiper des véhicules qui ont été libérés plusieurs intersections en amont et peuvent mettre plusieurs secondes à arriver. GTQN s’en charge en combinant des informations sur la topologie du réseau avec un historique de l’évolution des conditions dans le temps. Un module transformeur, popularisé à l’origine par les modèles de langage, est utilisé pour revenir sur l’historique récent de chaque intersection et identifier quels instants passés importent pour la décision courante. En parallèle, un module de graphe raisonne sur les connexions entre intersections. En fusionnant espace et temps dans un seul modèle, le système peut apprendre comment des platoons de véhicules se déplacent le long d’un couloir et comment mieux aligner les verts avec leur arrivée.
Fixer des objectifs au-delà d’un seul carrefour
Si chaque feu cherchait seulement à vider sa propre file, le couloir dans son ensemble pourrait mal fonctionner. Par exemple, un feu en aval pourrait écourter une phase verte qui aurait permis à un groupe de véhicules venant de l’amont de passer sans s’arrêter. Pour éviter cela, les auteurs conçoivent un objectif à deux niveaux. Chaque intersection est toujours récompensée pour la réduction de ses propres files et temps d’attente, mais un signal d’entraînement central pénalise aussi les arrêts supplémentaires subis par les véhicules circulant le long du couloir principal après leur départ du point d’entrée. Pendant l’entraînement, un module centralisé de « gouvernance » utilise ce score à l’échelle du couloir pour guider l’apprentissage. Après apprentissage, les contrôleurs appris agissent localement et n’échangent que des messages ciblés et peu nombreux avec leurs voisins sélectionnés.
Ce que montrent les simulations
L’équipe teste GTQN dans des simulations détaillées de grilles synthétiques et d’un réseau réel de la ville de Chengdu, en Chine, incluant un système de 100 intersections. Comparé à plusieurs méthodes avancées de contrôle multi-agents, GTQN réduit la fréquence des arrêts, raccourcit les temps d’attente et empêche les files de s’allonger au point de bloquer les jonctions en amont. Il conserve aussi des performances raisonnables quand certains messages entre intersections sont retardés ou perdus, une propriété importante pour les réseaux de communication réels. Des études d’ablation rigoureuses montrent que chaque élément de la conception compte : la parcimonie apprise, le modèle espace-temps combiné et le signal d’entraînement centralisé contribuent tous à une coordination robuste.
Ce que cela signifie pour les déplacements quotidiens
Pour les automobilistes, cyclistes et usagers de bus, l’idée est simple : plutôt que chaque feu de travailler en isolation, les signaux le long d’un couloir apprennent à s’anticiper et à protéger le déplacement des groupes de véhicules. Dans des simulations haute fidélité, cela se traduit par moins d’arrêts, des files plus courtes et des vitesses de déplacement plus constantes sur les axes fréquentés. Bien que l’étude reste pour l’instant confinée à un environnement virtuel et ne prenne pas encore en compte les piétons, la priorité aux transports en commun ou toutes les particularités du matériel réel, elle montre qu’une coopération soigneusement conçue entre de nombreux contrôleurs locaux peut transformer une série chaotique de feux rouges en un trajet plus prévisible et efficace.
Citation: Zhang, H. Graph transformer Q-network for collaborative governance and decentralized decision-making in multi-intersection networks. Sci Rep 16, 15549 (2026). https://doi.org/10.1038/s41598-026-45895-2
Mots-clés: commande de signalisation, apprentissage par renforcement multi-agents, transformeur de graphes, progression de corridor, transport intelligent