Clear Sky Science · it
Rete neurale a trasformatori su grafo per governance collaborativa e decisioni decentralizzate in reti multi-incrocio
Perché i semafori più intelligenti sono importanti
Chiunque guidi in città conosce la frustrazione di incontrare rosso dopo rosso, anche quando la strada sembra libera. Queste ondate di stop-and-go sono più di un fastidio: sprecano tempo, consumano carburante e possono paralizzare interi corridoi quando le code si estendono attraverso più incroci. Questo studio esplora un nuovo modo per far „parlare" i semafori tra loro in modo che le onde verdi si formino più regolarmente lungo lunghi tratti, anche quando il traffico è imprevedibile e la rete stradale è ampia e complessa.
Come le strade cittadine diventano una rete
I ricercatori iniziano trattando il sistema stradale urbano come una rete di punti connessi. Ogni incrocio è un nodo e ogni strada tra di essi è un collegamento. Ogni controllore del segnale vede solo ciò che riportano i sensori locali: quante auto stanno aspettando, da quanto sono in ritardo e quale fase è attualmente verde. Nessun controllore ha una visione completa della città, eppure ogni cambio di luce influenza il traffico che raggiungerà altri nodi in seguito. La sfida è permettere a questi controllori locali di cooperare in modo che i veicoli possano percorrere un corridoio con il minor numero possibile di fermate inutili, pur servendo strade laterali e manovre di svolta.
Insegnare ai semafori a cooperare passo dopo passo
Invece di piani di temporizzazione progettati a mano, gli autori utilizzano il reinforcement learning, in cui un algoritmo impara provando azioni in un simulatore di traffico e osservando i risultati. Ogni incrocio agisce come un agente che sceglie quale fase mostrare dopo e per quanto tempo. L'innovazione chiave è un metodo chiamato Graph Transformer Q-Network, o GTQN, che decide quali incroci vicini sono più rilevanti in ciascun momento. Lo fa in due fasi: prima seleziona un piccolo insieme di vicini influenti a monte o a valle, poi assegna a ciascuno una forza di influenza basata sullo stato corrente del traffico. Questo evita che il controllore venga sopraffatto da informazioni rumorose provenienti da nodi lontani che hanno scarso effetto sul proprio traffico.
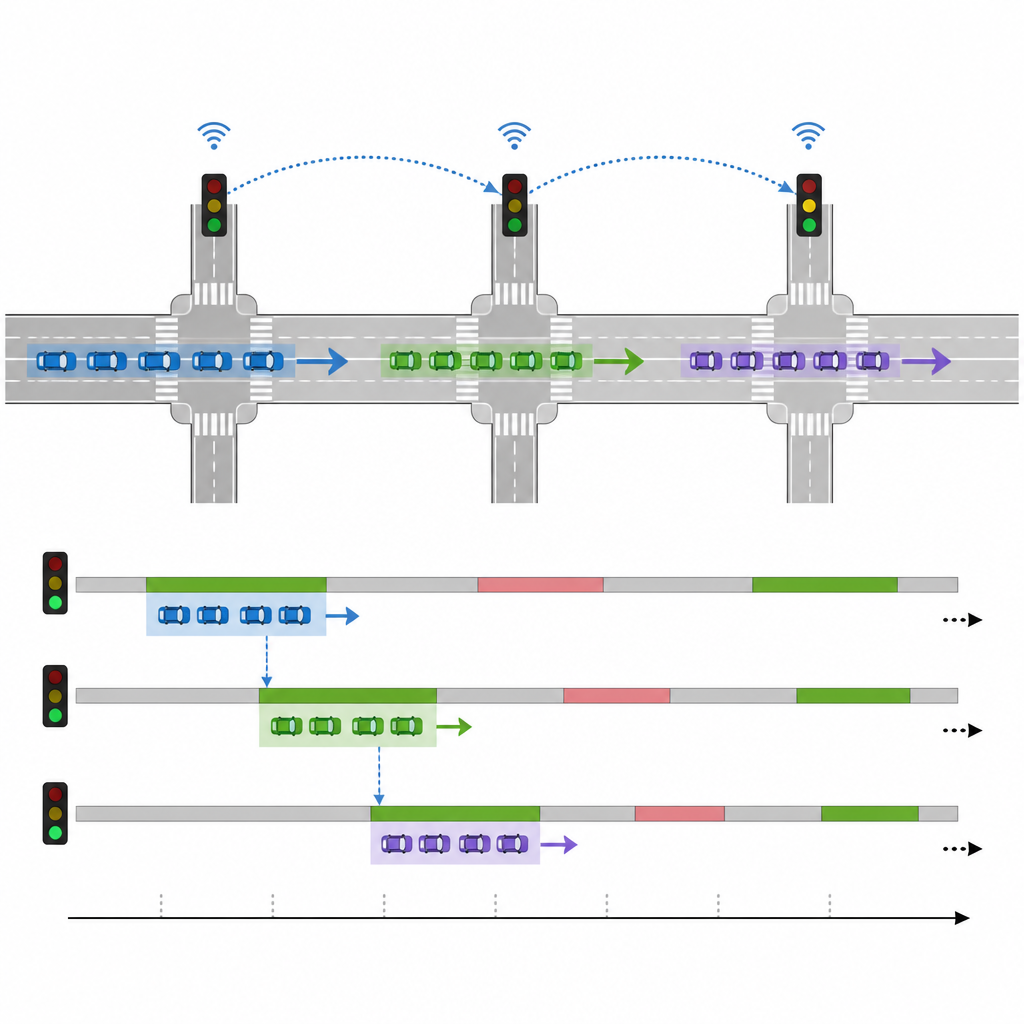
Seguire il traffico nello spazio e nel tempo
Per formare un'onda verde fluida, un segnale deve anticipare le auto che sono partite da diversi incroci indietro e che possono impiegare molti secondi per arrivare. GTQN affronta questo combinando informazioni sulla configurazione della rete con una registrazione di come le condizioni sono cambiate nel tempo. Un modulo transformer, reso popolare nei modelli di linguaggio, viene usato per guardare alla storia recente di ogni incrocio e selezionare quali momenti passati sono rilevanti per la decisione corrente. Allo stesso tempo, un modulo a grafo ragiona sulle connessioni tra gli incroci. Fondonendo spazio e tempo in un unico modello, il sistema può imparare come i plotoni di veicoli si muovono lungo un corridoio e come allineare al meglio i verdi con i loro arrivi.
Fissare obiettivi oltre il singolo angolo
Se ogni semaforo cercasse solo di svuotare la propria coda, il corridoio complessivo potrebbe comportarsi male. Per esempio, un segnale a valle potrebbe accorciare una fase verde che avrebbe permesso a un gruppo di auto provenienti a monte di attraversare senza fermarsi. Per evitare questo, gli autori progettano un obiettivo a due livelli. Ogni incrocio è comunque ricompensato per ridurre le proprie code e i tempi di attesa, ma un segnale di allenamento centralizzato penalizza anche le soste extra subite dai veicoli che viaggiano lungo il corridoio principale dopo essere stati rilasciati dal punto d'ingresso. Durante l'addestramento, un modulo di «governance» centralizzato usa questo punteggio a livello di corridoio per guidare l'apprendimento. Dopo l'addestramento, i controllori appresi agiscono localmente e condividono solo messaggi scarsi e mirati con i vicini selezionati.
Cosa mostrano le simulazioni
Il team testa GTQN in simulazioni dettagliate sia di griglie sintetiche sia di una rete cittadina reale di Chengdu, in Cina, includendo un sistema con 100 incroci. Rispetto a diversi metodi avanzati di controllo multi-agente, GTQN riduce la frequenza delle soste, accorcia i tempi di attesa e impedisce che le code crescano tanto da bloccare gli incroci a monte. Mantiene inoltre prestazioni ragionevoli quando alcuni messaggi tra incroci vengono ritardati o persi, una proprietà importante per le reti di comunicazione reali. Studi di ablazione accurati mostrano che ogni elemento del progetto conta: la sparsità appresa, il modello spazio-temporale combinato e il segnale di addestramento centralizzato contribuiscono tutti a una coordinazione robusta.
Cosa significa per gli spostamenti di tutti i giorni
Per automobilisti, ciclisti e passeggeri degli autobus, l'idea alla base di questo lavoro è semplice: invece che ogni semaforo operi in isolamento, i segnali lungo un corridoio imparano ad anticiparsi a vicenda e a proteggere il movimento dei gruppi di veicoli. Nelle simulazioni ad alta fedeltà, questo si traduce in meno soste, code più brevi e velocità di viaggio più costanti lungo le rotte trafficate. Pur essendo lo studio ancora limitato a un ambiente virtuale e non gestendo ancora pedoni, priorità per il trasporto pubblico o tutte le idiosincrasie dell'hardware reale, dimostra che una cooperazione progettata con cura tra molti controllori locali può trasformare una serie caotica di semafori rossi in un percorso più prevedibile ed efficiente.
Citazione: Zhang, H. Graph transformer Q-network for collaborative governance and decentralized decision-making in multi-intersection networks. Sci Rep 16, 15549 (2026). https://doi.org/10.1038/s41598-026-45895-2
Parole chiave: controllo dei segnali stradali, apprendimento per rinforzo multi-agente, graph transformer, progressione nei corridoi, trasporto intelligente