Clear Sky Science · tr
Deformable dikkat mekanizmasına dayalı nesne izleme algoritması
Kalabalık ve Karmaşık Bir Dünyada Takibi Sürdürmek
Modern kameralar yoğun caddeleri, alışveriş merkezlerini ve fabrika zeminlerini izliyor, ancak bu sahnelerde birçok hareketli insanı ve nesneyi takip etmeyi bilgisayarlara öğretmek şaşırtıcı derecede zordur. Birisi bir sütunun arkasından geçtiğinde, far parlaması olduğunda veya bir kalabalık kapıdan sıkışarak geçtiğinde, gelişmiş izleme yazılımları bile izini kaybedebilir, kimlikleri karıştırabilir veya çok fazla hesaplama gücü tüketebilir. Bu makale, gerçek dünyadaki bu kaotik durumlarda hedeflere daha güvenilir şekilde kilitlenmeyi amaçlayan ve yine de pratik kullanım için yeterince verimli çalışan yeni bir izleme yaklaşımı sunar.
Geleneksel İzlemenin Neden Yetersiz Kaldığı
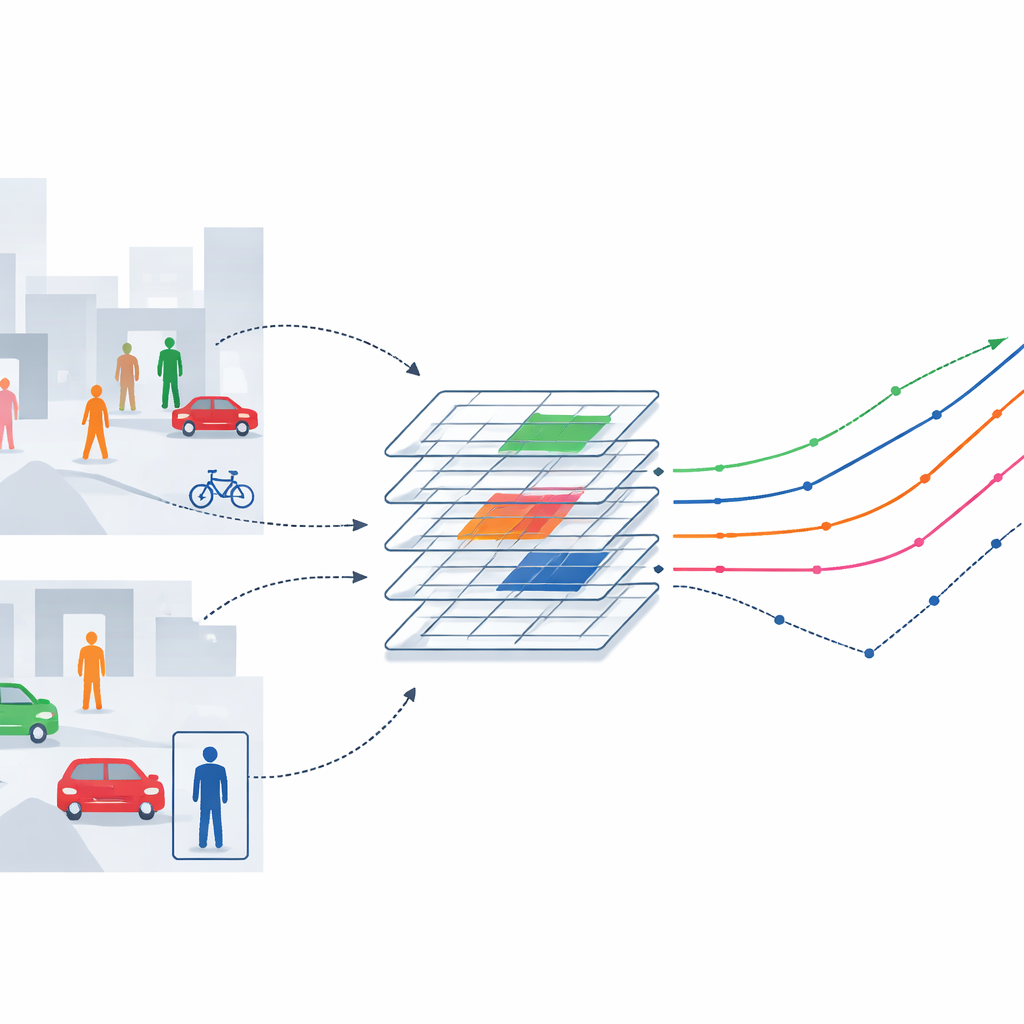
Nesne izleme sistemleri genellikle üç aşamada çalışır: önce her video karosunu tarayıp görsel ayrıntıları çıkarırlar, sonra farklı ölçek ve alanlardan gelen bilgileri birleştirirler ve son olarak her hedefin zaman içindeki hareketini tahmin ederler. Son dönemde birçok yöntem bu adımlardan birini ayrı ayrı geliştirdi—örneğin detektörü iyileştirmek, hesaplamayı hızlandırmak veya daha akıllı hareket modelleri eklemek. Ancak kalabalık, hızlı değişen sahnelerde bu parçalar arasındaki zayıflıklar ortaya çıkar. Standart ağlardaki sabit “görüş alanları” bükülen vücutlara veya değişen pozlara uyum sağlayamaz ve düzgün, basit hareket varsayan hareket tahmini, insanlar durduğunda, döndüğünde veya kısa süreliğine engellerin arkasına kaybolduğunda ciddi sapmalar gösterebilir.
Hareketli Hedefler İçin Esnek Bir Bakış
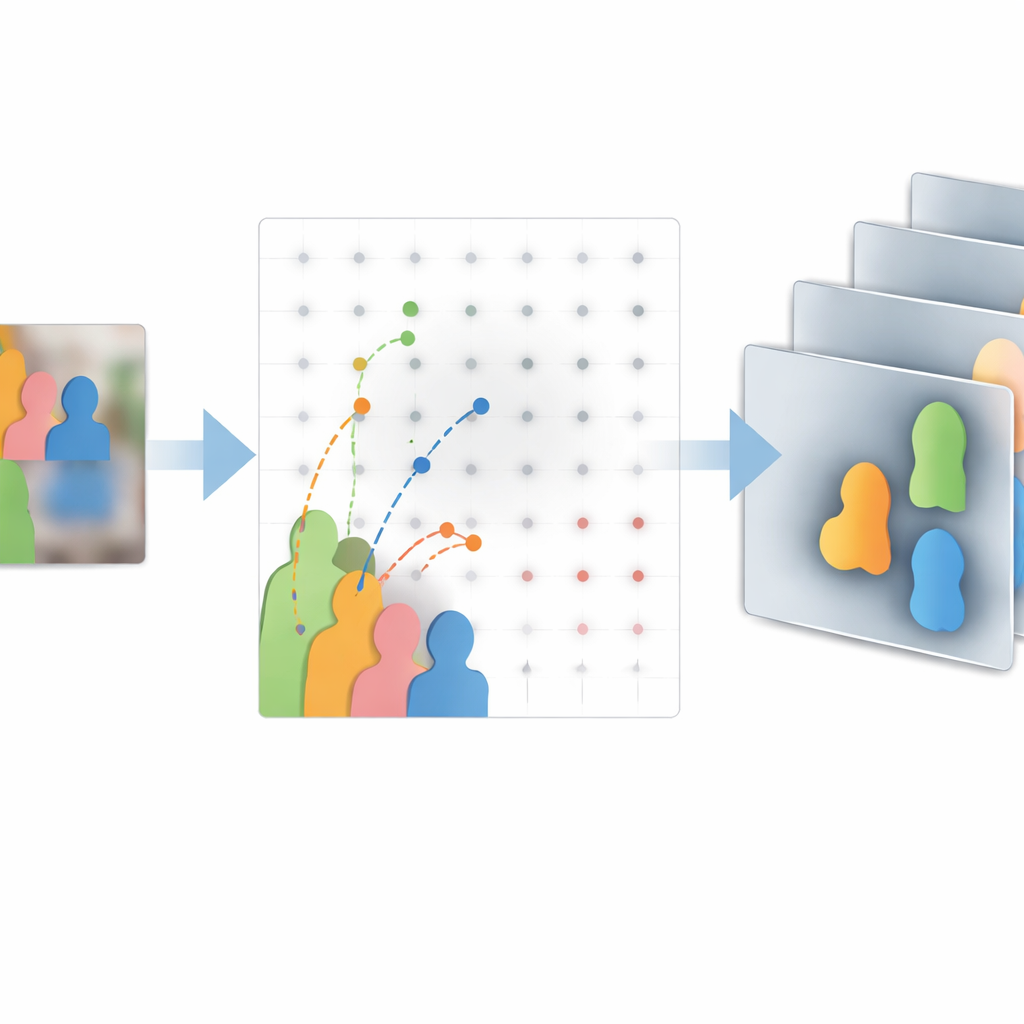
Yazarlar bu sınırlamaları, izleme sistemine sahneye “bakmak” için daha esnek bir yol vererek ele alıyor. Popüler bir görüntü işleme omurgası olan ResNet-18 ile başlayıp deformable dikkat (deformable attention) mekanizmasını ağın içine yerleştiriyorlar. Görsel bilgiyi her zaman katı, eşit aralıklı noktalardan örneklemek yerine bu mekanizma, örneğin bir gövde veya başın konturu gibi en bilgi verici noktalara örnekleme konumlarını kaydırmayı öğrenir ve dikkat dağıtan arka plan karmasından kaçınır. Bu esnek dikkati ağın daha derin katmanlarına ekleyerek, sistem insanlar poz değiştirirken, ölçek değiştirirken veya kısmen gizlenirken odağını uyarlayabiliyor; üstelik bunun getirdiği hesaplama yükü çok az. Büyük kıyaslama testleri, bu esnek bakışın sadece izleme doğruluğunu artırmakla kalmayıp hesaplamada %8’den az bir artış ve parametrelerde yalnızca küçük bir artış ile bunu başardığını gösteriyor.
Ölçekler ve Zaman Boyunca Ayrıntıları Harmanlamak
Aynı anda birçok nesneyi izlemek, sistemin hem ince ayrıntıları hem de genel resmi anlamasını gerektirir. Bunu yapmak için yöntem, kaba, yüksek seviyeli görünümlerle ince, düşük seviyeli detaylardan gelen bilgileri karıştıran özel bir özellik birleştirme modülü olan çift yönlü bir özellik piramidi kullanır. Yazarlar bu modülü aynı deformable dikkat fikriyle geliştirerek, insanlar üst üste bindiğinde veya hızla hareket ettiğinde yanlış eşleşebilecek özellikleri daha iyi hizalanabilir hale getiriyor. Bu, yoğun kalabalıklarda bireyleri ayırmaya ve kimlik karışmalarını azaltmaya yardımcı olur. Zaman boyutunda algoritma klasik bir kontrol teorisi aracı olan Kalman filtresine dayanıyor, fakat daha akıllı bir şekilde. Modelin tahminini ana gerçek olarak kabul edip detektörü küçük bir düzeltme olarak ele almak yerine, filtrenin davranışı her karede detektörün ne kadar emin olduğuna göre yönlendiriliyor. Detektör emin olduğunda sistem ona doğrudan güveniyor ve hata birikimini kesiyor; belirsiz olduğunda ise filtre geçmiş harekete daha fazla yaslanıyor ve her iki kaynağı akıcı şekilde harmanlıyor.
Gerçek Dünyada Ne Kadar İyi Çalışıyor?
Ekip yaklaşımlarını—DAM-Track adını verdikleri yöntemi—izleme algoritmalarını zorlamak için tasarlanmış zorlu halka açık veri kümelerinde değerlendiriyor. Uzun diziler ve güçlü deformasyon veya tam örtülme gibi zorlu durumları vurgulayan tek nesne testlerinde, deformable dikkat omurgası standart ResNet-18’e göre örtüşme ve başarı oranlarını artırıyor, üstelik ağır ek maliyet olmadan. Son derece yoğun yaya kalabalıkları içeren ünlü bir çoklu nesne kıyaslama testinde DAM-Track, ByteTrack ve DeepSORT gibi yaygın kullanılan yöntemlere kıyasla daha yüksek genel doğruluk, daha keskin yerelleştirme ve daha iyi kimlik tutarlılığı sağlıyor. Daha fazla iz sürüsünü daha uzun süre koruyor, daha az hedef kaybediyor ve kimlik değişimlerinden kaçınmada özellikle iyi performans gösteriyor; bu tür özellikler güvenlik izleme ve trafik analizi gibi uygulamalar için kritik öneme sahip.
Günlük Uygulamalar İçin Anlamı Nedir?
Uzman olmayan bir okuyucu için çıkarılacak nokta şu: bu çalışma, bilgisayarlı görü izleyicilerini tren istasyonları ve şehir sokaklarından akıllı mağazalara ve otonom araçlara kadar pratikte en çok önem taşıyan karmaşık, öngörülemez sahnelerde daha dayanıklı hale getiriyor. Sistemin “bakışının” önemli bölgelere doğru eğilmesine izin vererek ve özellik çıkarımı, çok ölçekli birleştirme ile hareket tahminini ortak bir güven kavramı etrafında koordine ederek yazarlar, kim olduğuna ve kimin nerede olduğuna dair takibi zaman içinde daha iyi sürdüren kapalı döngü bir izleyici inşa ediyorlar. Gece, hava çekimleri ve çoklu kamera ayarlarında daha fazla test gereksinimi olsa da, bu esnek ve güvene duyarlı tasarım, pratik olmayan hesaplama kaynakları talep etmeden karmaşık ortamları daha güvenilir izleyebilen yeni nesil izleme sistemlerine işaret ediyor.
Atıf: Liu, Q., Yu, N. & Cheng, J. Object tracking algorithm based on deformable attention mechanism. Sci Rep 16, 12454 (2026). https://doi.org/10.1038/s41598-026-43147-x
Anahtar kelimeler: çoklu nesne takibi, bilgisayarlı görü, dikkat mekanizmaları, kalabalık gözetimi, otonom sürüş