Clear Sky Science · ru
Многоканальная мультицентроидная компенсирующая движение однопиксельная визуализация двухмерной произвольно движущейся твердотельной цели
Более четкие изображения при меньшем числе пикселей
Технологии визуализации обычно опираются на крупные сложные сенсорные матрицы с миллионами мелких пикселей. Существует иной подход: использовать всего один световой датчик и положиться на продуманные шаблоны и вычисления. В этой работе показано, как идея однопиксельной камеры может быть развита дальше, позволяя отслеживать и четко изображать маленькие быстро движущиеся объекты, которые вращаются, поворачиваются и даже частично выходят из поля зрения — и всё это в реальном времени.
Почему одного пикселя может быть достаточно
В однопиксельной визуализации сцена подсвечивается или фильтруется последовательностью структурированных шаблонов, а одиночный детектор измеряет только суммарную яркость для каждого шаблона. Комбинируя эти измерения математически, можно восстановить полное изображение. Такой подход привлекателен тогда, когда высокопроизводительные матрицы детекторов дороги или непрактичны — например, в терахерцовом диапазоне, при рентгеновской съёмке или при регистрации отдельных фотонов. Он также хорошо сочетается с «сжатой» выборкой, требующей значительно меньшего числа измерений, чем в традиционных камерах. Однако есть серьёзный нюанс: объект обычно должен оставаться неподвижным, пока шаблоны накладываются последовательно. При движении измерения перестают соответствовать друг другу, что приводит к размытиям и призракам на итоговом изображении.
Сложность движущихся и вращающихся целей
Ранние попытки справиться с движением в однопиксельной визуализации ориентировались на простое движение по прямой. Часто использовались дополнительные «локаторные» шаблоны в последовательности для оценки положения, либо применялись превью‑изображения или внешние камеры для измерения движения. Такие ухищрения либо снижают эффективную частоту кадров, либо предполагают повторяемость движения, либо слабо работают, когда объект одновременно трансслируется и вращается. Вращательное движение особенно проблемно: даже небольшая погрешность в оценке угла может привести к большой сдвиговой ошибке на краю объекта, смазывая мелкие детали. Существующие схемы также склонны терять объект, когда он частично выходит за пределы поля зрения — ситуация обычная в реальных задачах трекинга.
Новый способ следить за движением и «замораживать» его
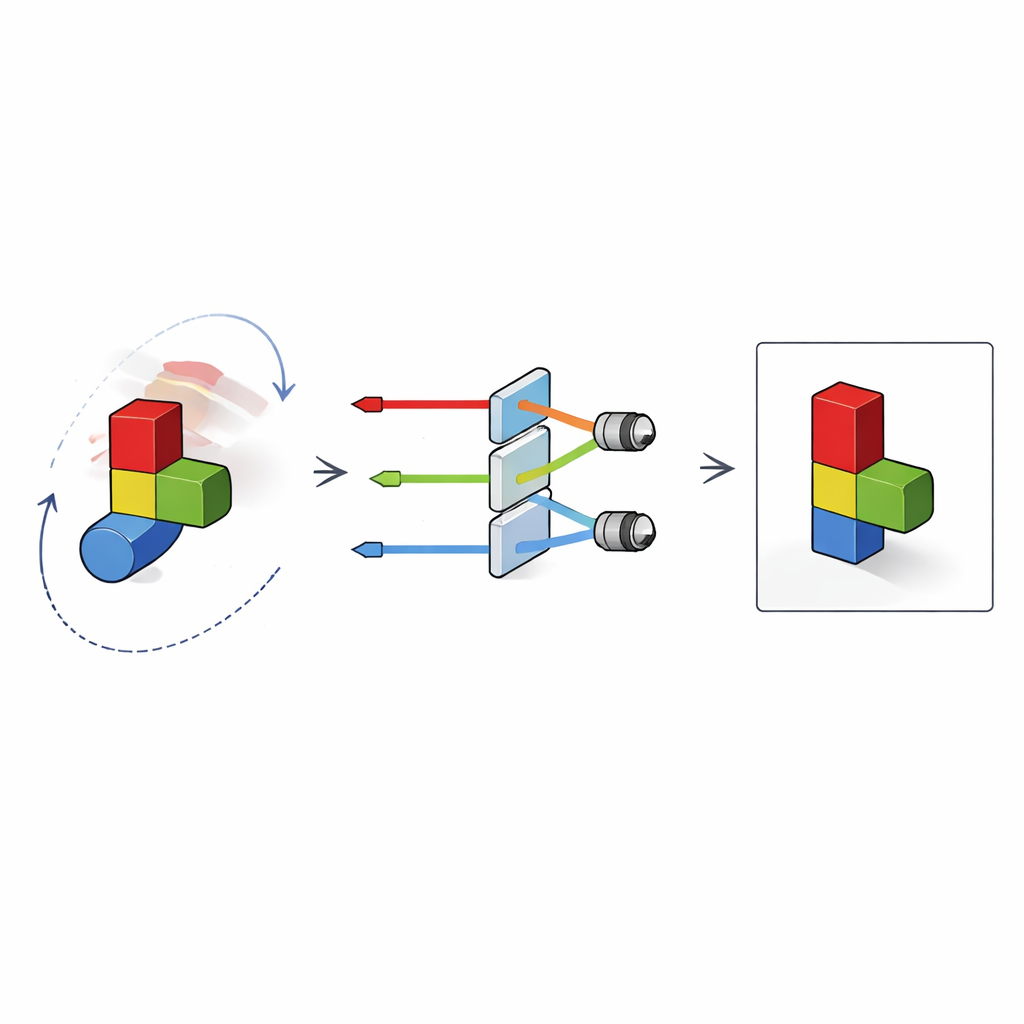
Авторы предлагают MC3‑SPI (Multichannel Multicentroid Motion‑compensated Single‑Pixel Imaging) — метод, который отслеживает и визуализирует жесткие объекты при любой двухмерной кинематике, включая произвольные сочетания трансляции и вращения, не теряя временного разрешения. Ключевая идея — закодировать несколько специально подобранных фурье‑шаблонов, которые ведут себя как глобальные линейки, наложенные на поле зрения. Анализируя, как сдвигается фаза сигнала от этих шаблонов, система определяет центр массы объекта с точностью примерно до одной третьей пикселя. Поскольку свет делится на красный, зелёный и синий каналы, каждый цвет даёт собственный центроид; эти три точки вместе задают и положение, и ориентацию объекта в каждом измерительном кадре. Обладая этой информацией, метод как бы запускает фильм в обратную сторону: к самим шаблонам применяется обратная трансляция и вращение, прежде чем их объединить в изображение — процедуру авторы называют обратным преобразованием с компенсацией движения.
Больше деталей при меньшем числе измерений
Через моделирование и эксперименты исследователи показывают, что фурье‑шаблоны особенно пригодны для такого вида компенсации движения, потому что они остаются почти ортогональными даже после сдвигов и поворотов, сохраняя качество реконструкции при низкой частоте выборки. В отличие от них, другая популярная группа шаблонов — матрицы Хадамара — быстрее теряет ортогональность при компенсации движения и требует большего числа измерений для достижения сопоставимого качества изображения. Используя оптимизированную фурье‑схему, команда успешно отслеживает и реконструирует цветные цели — буквы «BIT», мультяшный персонаж и игрушечную ракету — проходящие сложное 2D‑движение. Даже когда объект скользит по краю поля зрения так, что ни в одном кадре он не виден полностью, MC3‑SPI может восстановить истинную траекторию, используя избыточную информацию о центроидах в трёх цветовых каналах, и со временем собрать четкое полноцветное изображение.
От лабораторной демонстрации к быстрым практическим системам
Главное преимущество подхода — скорость. Для определения движения требуется всего шесть локализующих шаблонов на кадр, поэтому при максимальной частоте модуляции стандартного цифрового микрозеркального устройства система теоретически может отслеживать движение тысячи раз в секунду. Базовый шаг реконструкции — суммирование компенсированных по движению шаблонов — также чрезвычайно быстр, на порядки быстрее итерационных алгоритмов оптимизации, при этом даёт четкие результаты при уровнях выборки до 5%. Более сложные алгоритмы можно добавить позднее, когда потребуется более высокое качество изображения и есть запас по времени. Поскольку MC3‑SPI работает на стандартных компонентах и интегрируется в привычные однопиксельные установки, его можно сочетать с гиперспектральными, трёхмерными или временно‑разрешёнными схемами, что открывает возможности для детализированной съёмки быстрых, слабых или труднодоступных объектов — от микроскопии до дистанционного зондирования.
Что это значит для будущей визуализации
По сути, эта работа демонстрирует, как превратить простую однопиксельную систему в гибкую камеру, чувствительную к движению, которая может поспевать за манёвренными вращающимися объектами и при этом давать чёткие снимки. Умный выбор иллюминационных шаблонов, использование цветовых каналов для определения нескольких опорных точек на объекте и программная компенсация его движения позволяют авторам преодолеть давний компромисс между скоростью, разрешением и чувствительностью к движению в однопиксельной визуализации. Это прокладывает практический путь к компактным и недорогим системам, которые не просто «замораживают» мир, но и следуют за ним в реальном времени.
Цитирование: Shao, C., Cao, Y., Li, S. et al. Multichannel multicentroid motion-compensated single pixel imaging of a 2D arbitrarily moving rigid-body target. Commun Eng 5, 61 (2026). https://doi.org/10.1038/s44172-026-00619-2
Ключевые слова: однопиксельная визуализация, отслеживание движения, вычислительная визуализация, фурье‑шаблоны, высокоскоростная визуализация