Clear Sky Science · it
Imaging a singolo pixel multicanale multicentroide compensata per il moto di un bersaglio rigido 2D in movimento arbitrario
Immagini più nitide con meno pixel
Le tecnologie di imaging si basano di solito su grandi sensori complessi con milioni di piccoli pixel. Esiste però un approccio diverso: usare un solo sensore di luce e affidarsi a pattern intelligenti e alla computazione per fare il resto. Questo articolo mostra come l’idea del singolo pixel possa essere spinta oltre, rendendo possibile tracciare e ricostruire con chiarezza piccoli oggetti in rapido movimento che ruotano, si inclinano e perfino escono parzialmente dal campo visivo — tutto in tempo reale.
Perché un solo pixel può bastare
Nell’imaging a singolo pixel, una scena viene illuminata o filtrata da una sequenza di pattern strutturati, e un unico rivelatore misura soltanto la luminosità totale per ciascun pattern. Combinando matematicamente tutte queste misure si può ricostruire un’immagine completa. Questo approccio è interessante quando array di rivelatori ad alte prestazioni sono costosi o impraticabili, come nel terahertz, nei raggi X o nell’imaging a singolo fotone. Funziona bene anche con il campionamento «compressivo», così che sono necessarie molte meno misure rispetto alle fotocamere tradizionali. Tuttavia c’è un grosso problema: l’oggetto deve rimanere fermo mentre i pattern vengono applicati uno dopo l’altro. Se si muove, le misure non corrispondono più, provocando sfocature e artefatti nell’immagine finale.
La sfida dei bersagli che si muovono e ruotano
I tentativi precedenti di gestire il moto nell’imaging a singolo pixel si concentravano su spostamenti semplici in linea retta. Spesso si basavano sull’inserimento di pattern «localizzatori» nella sequenza per stimare la posizione, oppure su immagini di anteprima o fotocamere esterne per misurare il movimento. Questi accorgimenti riducono il frame rate effettivo, assumono movimenti ripetitivi o faticano quando gli oggetti sia traslano sia ruotano. Il moto rotazionale è particolarmente insidioso: anche un piccolo errore nell’angolo stimato può tradursi in grandi spostamenti ai bordi dell’oggetto, sfumando i dettagli fini. I metodi esistenti tendono anche a perdere il tracciamento quando l’oggetto si sposta parzialmente fuori dal campo visivo, cosa comune nelle attività di tracking reali.
Un nuovo modo per seguire e «congelare» il moto
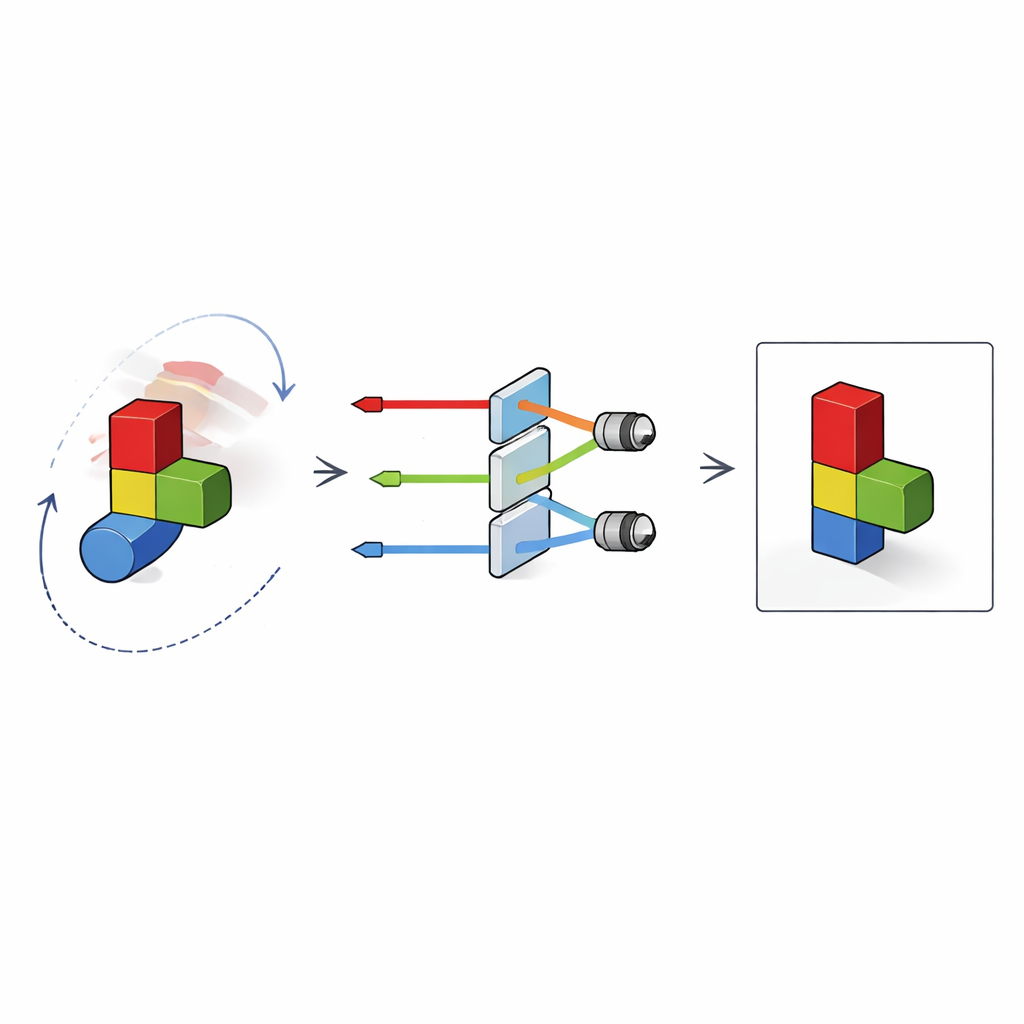
Gli autori introducono MC3‑SPI (Multichannel Multicentroid Motion‑compensated Single‑Pixel Imaging), un metodo che traccia e riprende oggetti rigidi soggetti a qualsiasi moto bidimensionale — comprese combinazioni arbitrarie di traslazione e rotazione — senza sacrificare la risoluzione temporale. L’idea chiave è codificare un piccolo insieme di pattern di Fourier appositamente scelti, che agiscono come righelli globali sovrapposti al campo visivo. Esaminando come la fase del segnale associato a questi pattern si sposta, il sistema individua il centro di massa dell’oggetto con una precisione dell’ordine di un terzo di pixel. Poiché la luce viene separata nei canali rosso, verde e blu, ciascun colore fornisce il proprio centroide; insieme, questi tre punti definiscono sia la posizione sia l’orientamento dell’oggetto in ogni frame di misura. Con queste informazioni, il metodo poi procede a modo di «riprodurre il film al contrario»: applica alle stesse pattern le traslazioni e le rotazioni opposte prima di combinarle in un’immagine, una procedura che gli autori chiamano trasformata inversa compensata per il moto.
Vedere di più con meno misure
Attraverso simulazioni ed esperimenti, i ricercatori mostrano che i pattern di Fourier sono particolarmente adatti a questo tipo di correzione del moto, perché rimangono quasi ortogonali anche dopo essere stati traslati e ruotati, preservando la qualità della ricostruzione a bassi tassi di campionamento. Al contrario, un’altra famiglia di pattern popolare, gli Hadamard, perde ortogonalità più rapidamente sotto la compensazione del moto e richiede più misure per raggiungere una qualità d’immagine simile. Utilizzando il loro schema Fourier ottimizzato, il team traccia e ricostruisce con successo bersagli a colori come le lettere «BIT», un personaggio dei cartoni e un razzo giocattolo, tutti sottoposti a movimenti 2D complessi. Anche quando l’oggetto sfiora il bordo del campo visivo in modo che nessun singolo frame lo contenga per intero, MC3‑SPI riesce a recuperarne la traiettoria reale sfruttando l’informazione ridondante dei centroidi sui tre canali colore, e può comunque ricostruire nel tempo un’immagine nitida a colori completa.
Dal demo di laboratorio a sistemi rapidi e pratici
Un vantaggio importante dell’approccio è la velocità. Determinare il moto richiede soltanto sei pattern di localizzazione per frame, quindi alla massima velocità di modulazione di un tipico digital micromirror device il sistema potrebbe in linea di principio tracciare il moto migliaia di volte al secondo. Il passo base di ricostruzione — sommare pattern compensati per il moto — è inoltre estremamente rapido, ordini di grandezza più veloce rispetto ad algoritmi iterativi di ottimizzazione, pur restituendo risultati chiari a tassi di campionamento bassi quanto il 5%. Algoritmi più sofisticati possono essere aggiunti successivamente quando è richiesta maggiore qualità d’immagine e il tempo lo consente. Poiché MC3‑SPI funziona con componenti disponibili in commercio e si integra con allestimenti standard per il singolo pixel, può essere combinato con schemi iperspettrali, tridimensionali o risolti nel tempo, abilmente permettendo l’imaging dettagliato di bersagli rapidi, deboli o difficili da raggiungere in ambiti che vanno dalla microscopia al telerilevamento.
Cosa significa per il futuro dell’imaging
In sostanza, questo lavoro mostra come trasformare un semplice sistema a singolo pixel in una fotocamera agile e consapevole del moto, capace di tenere il passo con oggetti agili e rotanti pur fornendo immagini nitide. Scegliendo con intelligenza i pattern di illuminazione, usando i canali colore per definire più punti di riferimento sull’oggetto e compensando il movimento via software, gli autori superano la tensione di lunga data tra velocità, risoluzione e sensibilità al moto nell’imaging a singolo pixel. Ciò apre una strada pratica verso sistemi di imaging compatti e poco costosi che non si limitano a congelare il mondo, ma lo seguono in tempo reale.
Citazione: Shao, C., Cao, Y., Li, S. et al. Multichannel multicentroid motion-compensated single pixel imaging of a 2D arbitrarily moving rigid-body target. Commun Eng 5, 61 (2026). https://doi.org/10.1038/s44172-026-00619-2
Parole chiave: imaging a singolo pixel, tracciamento del moto, imaging computazionale, pattern di Fourier, imaging ad alta velocità