Clear Sky Science · ru
Кинематическое моделирование и моделирование работы двустороннего строгального станка с использованием подходов Ньютон — Эйлер и Лагранжа
Почему важно двустороннее резание
Во многих цехах строгальные станки применяют для обработки плоских поверхностей металлических деталей. Традиционные машины режут только в одном направлении: инструмент удаляет материал при рабочем ходе, а затем возвращается назад без работы. Этот простой ход тратит время и энергию. В суммируемой статье рассматривается более разумная конструкция, которая режет с двух сторон одновременно, и показано, с помощью тщательного анализа движения и компьютерного моделирования, как такая машина может работать плавно, надёжно и эффективно.
Машина, работающая в оба направления
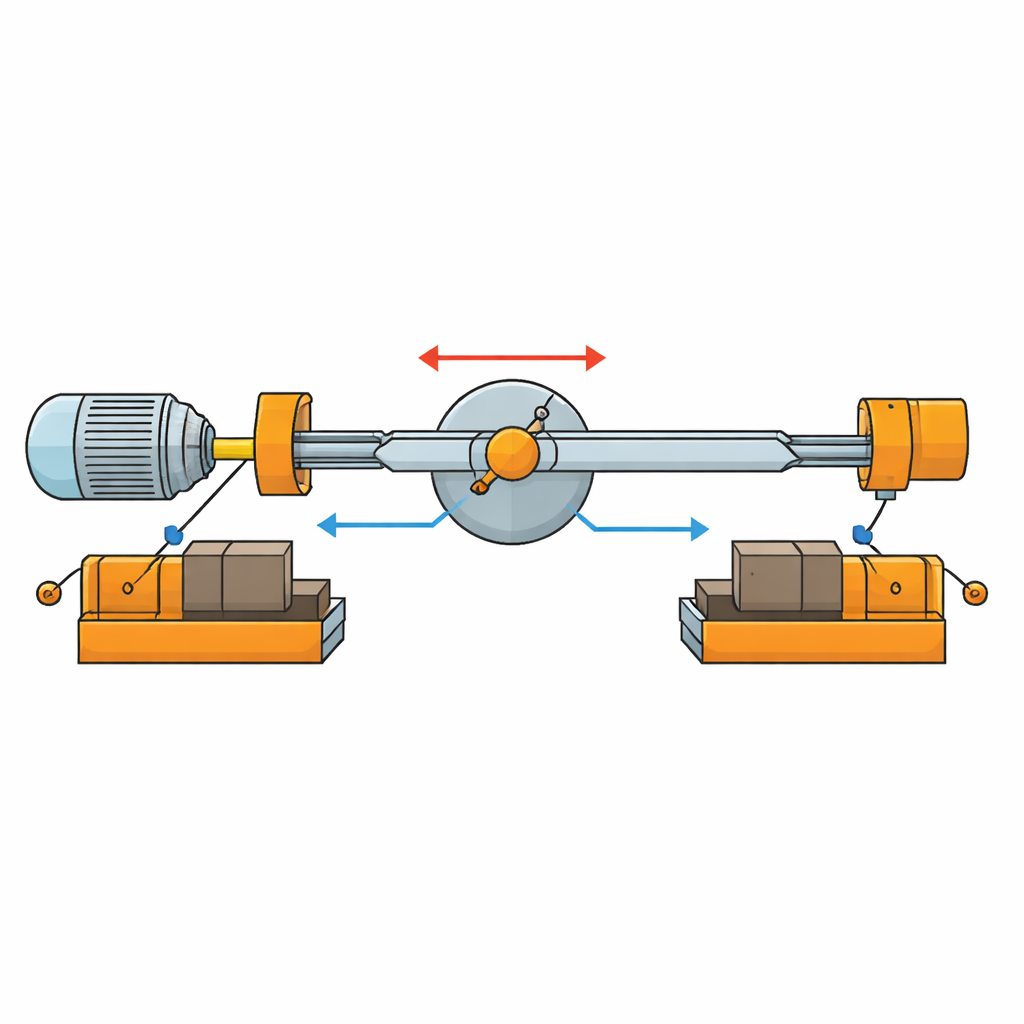
Исследование сосредоточено на компактном «двустороннем» строгальном станке. Вместо одного инструмента, работающего в одном направлении, эта конструкция использует два инструмента, обращённых к противоположным сторонам заготовки. Когда один инструмент завершает рабочий ход и обычно возвращался бы свободно назад, второй инструмент выполняет резание с противоположной стороны. По сути, движение, которое раньше было потеряно, превращается в производительную работу, почти удваивая скорость снятия материала без необходимости второго мотора или значительно большей машины.
Как вращение превращается в поступательное движение
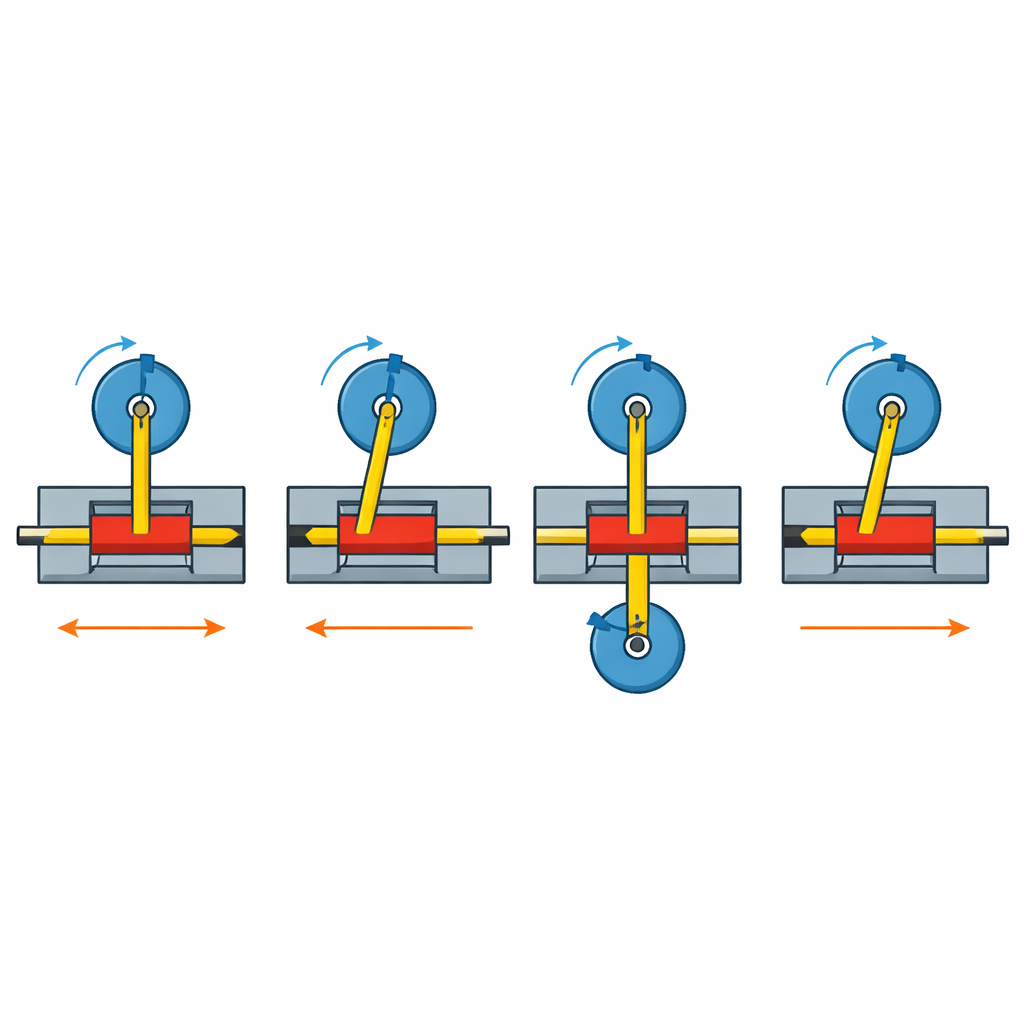
В основе этого двустороннего строгального станка — классическая механическая схема, называемая Scotch yoke. Вращающийся кривошип, приводимый в движение мотором через ремни и шкивы, несёт штифт, который скользит внутри паза в планке. По мере вращения кривошипа штифт заставляет планку двигаться взад-вперёд по прямой. В этой конструкции прорезная планка соединена со штангами, которые приводят в движение два режущих инструмента по противоположным сторонам. Авторы приводят простые геометрические соотношения, описывающие, насколько каждый инструмент смещается, с какой скоростью он движется и как его движение зависит от радиуса кривошипа и компоновки механизма.
Преобразование движения в уравнения
Чтобы выйти за рамки грубого эскиза и обеспечить плавную работу, команда строит полную математическую модель движения машины. Они рассматривают движущиеся части — кривошип, юок (салазки), штанги, инструменты и шкивы — как систему, скорости и ускорения которой можно описать уравнениями. Применяются два классических подхода механики. Метод Ньютон–Эйлера отслеживает изменения кинетической энергии каждой части во времени, тогда как метод Лагранжа начинается с разности кинетической и потенциальной энергии. При реалистичных упрощениях, таких как пренебрежение малыми силами трения и растяжением ремня, оба подхода приводят к одинаковому компактному уравнению движения для угла кривошипа и, следовательно, для поступательных инструментов.
Проверка математики на компьютере
Чтобы убедиться, что эти уравнения действительно описывают реальное движение машины, авторы реализуют их в MATLAB, широко используемой платформе для технических вычислений. Одна программа анимирует виртуальную модель строгального станка, показывая вращение кривошипа и движение инструментов в противоположных направлениях. Вторая программа строит графики изменения положения, скорости и ускорения ключевых точек во времени. Полученные кривые следуют знакомым синусоидальным и косинусоидальным закономерностям, ожидаемым от кривошипно-ползунного механизма: инструменты плавно качаются взад-вперёд с ходом, равным двойному радиусу кривошипа, а их скорости и ускорения изменяются в регулярных циклах. Эти численные результаты совпадают с ручными расчётами и подтверждают согласованность обоих математических подходов.
Что это значит для реальных машин
Для неспециалистов главный вывод в том, что авторы создали надёжную модель движения экономичного двустороннего строгального станка и показали, что два разных теоретических подхода сходятся в описании его поведения. Это даёт конструкторам прочную основу для расчёта размеров деталей, выбора скоростей и предсказания траекторий инструментов ещё до изготовления оборудования. Хотя в настоящей работе приняты идеализированные условия — игнорируются силы резания, большие нагрузки и вибрации — она закладывает базу для дальнейших исследований, учитывающих эти эффекты. В конечном счёте такое моделирование может помочь инженерам настроить строгальные станки так, чтобы они резали быстрее, служили дольше и потребляли меньше энергии в повседневной промышленной эксплуатации.
Цитирование: Gutata, G.R., Kebede, G.A. & Abbera, G.H. Kinematic modeling and simulation of dual-sided shaper machine using Newton-Euler and Lagrangian approaches. Sci Rep 16, 10455 (2026). https://doi.org/10.1038/s41598-026-40795-x
Ключевые слова: двусторонний строгальный станок, механизм Scotch yoke, кинематическое моделирование, Ньютон — Эйлер и Лагранж, симуляция в MATLAB