Clear Sky Science · nl
Kinematische modellering en simulatie van een tweezijdige schaafmachine met Newton–Euler- en Lagrange-benaderingen
Waarom tweezijdig snijden belangrijk is
In veel fabrieken worden schaafmachines gebruikt om vlakke oppervlakken in metalen onderdelen te frezen. Traditionele versies van deze machines snijden slechts aan één zijde: het gereedschap verwijdert materiaal terwijl het vooruit beweegt en schuift vervolgens terug zonder werk te verrichten. Deze pauze verspilt tijd en energie. Het hier samengevatte artikel onderzoekt een slimere opzet die aan beide zijden tegelijk snijdt en laat, aan de hand van nauwkeurige bewegingsanalyse en computersimulatie, zien hoe zo’n machine soepel, betrouwbaar en efficiënt kan werken.
Een machine die in beide richtingen werkt
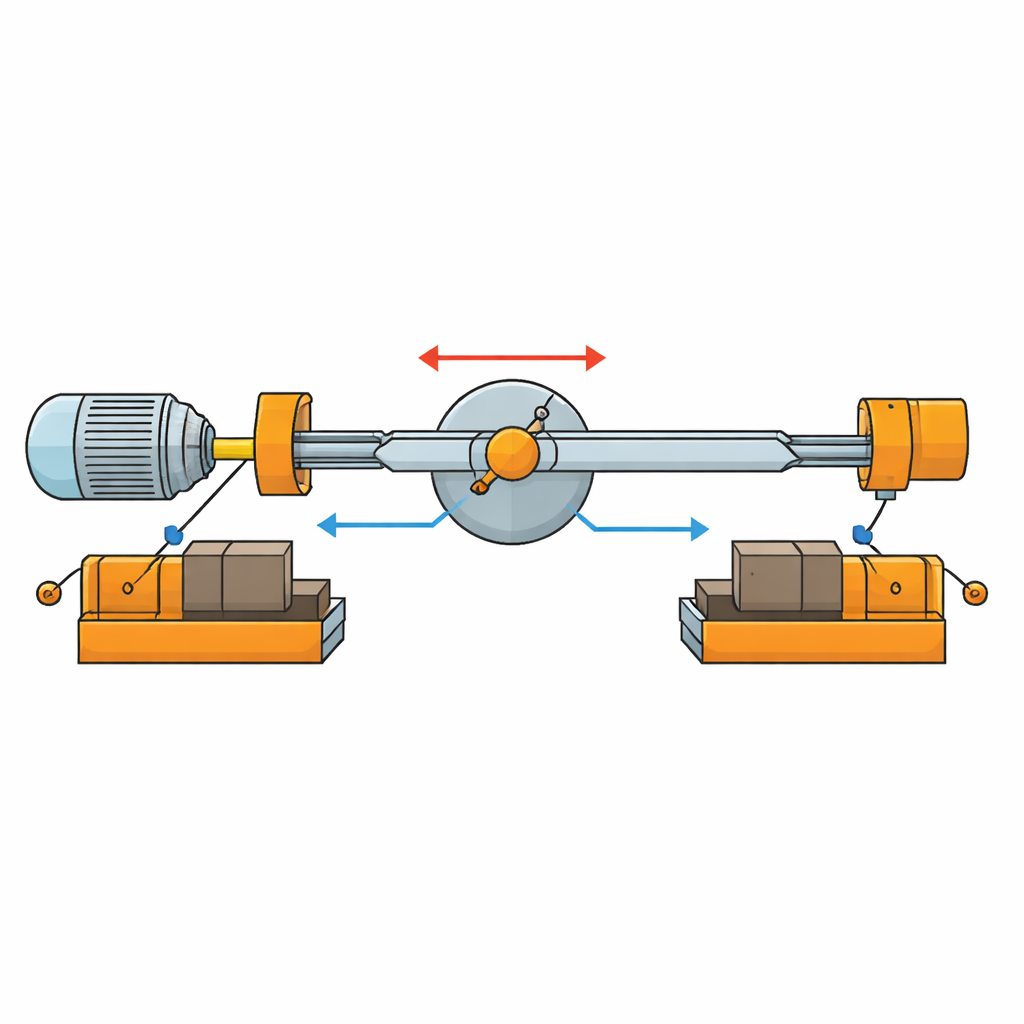
De studie richt zich op een compact "tweezijdig" schaafontwerp. In plaats van één snijgereedschap dat in één richting werkt, gebruikt dit ontwerp twee gereedschappen die tegenoverliggende zijden van het werkstuk beslaan. Terwijl het ene gereedschap zijn snijfase beëindigt en normaal gesproken leeg zou terugkeren, neemt het andere gereedschap zijn beurt over en snijdt aan de andere zijde. In feite wordt een beweging die vroeger verloren ging omgezet in productief werk, waardoor de materiaalverwijderingssnelheid vrijwel verdubbelt zonder een tweede motor of een veel grotere machine nodig te hebben.
Hoe draaien in schuiven verandert
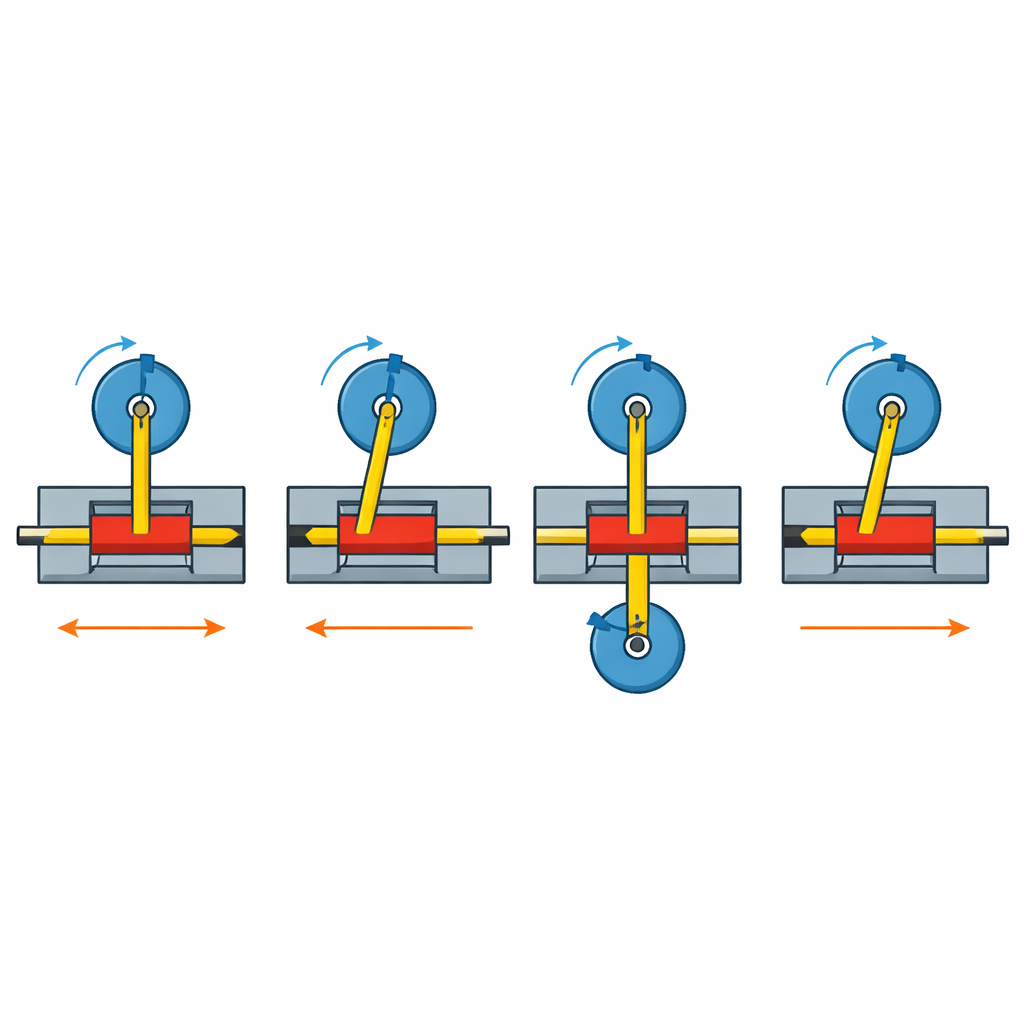
In het hart van deze tweezijdige schaaf bevindt zich een klassiek mechanisme dat bekendstaat als een Scotch yoke. Een roterende krukas, aangedreven door een motor via riemen en poelies, draagt een pen die in een gleuf in een stang schuift. Terwijl de krukas draait, dwingt de pen de stang om heen en weer in een rechte lijn te bewegen. In dit ontwerp is de geschulpte stang gekoppeld aan drijfstangen die de twee snijgereedschappen aan tegenovergestelde zijden aandrijven. De auteurs geven eenvoudige geometrische relaties die beschrijven hoe ver elk gereedschap beweegt, hoe snel het reist en hoe die beweging afhangt van de straal van de krukas en de configuratie van het mechanisme.
Beweging omzetten in vergelijkingen
Om verder te gaan dan een ruwe schets en een soepele werking te garanderen, bouwen de onderzoekers een volledig wiskundig model van de beweging van de machine. Ze behandelen de bewegende onderdelen — de krukas, yoke, drijfstangen, gereedschappen en poelies — als een systeem waarvan snelheden en versnellingen door vergelijkingen beschreven kunnen worden. Ze gebruiken twee klassieke methoden uit de mechanica. De Newton–Euler-methode volgt hoe de kinetische energie van elk onderdeel in de tijd verandert, terwijl de Lagrange-methode uitgaat van het verschil tussen kinetische en potentiële energie. Onder realistische vereenvoudigingen, zoals het verwaarlozen van geringe wrijving en riemstrekking, leiden beide methoden tot dezelfde compacte bewegingsvergelijking voor de krukhoek en daarmee ook voor de schuivende gereedschappen.
De wiskunde op de computer controleren
Om te controleren of deze vergelijkingen daadwerkelijk het bewegingsgedrag van de machine vangen, implementeren de auteurs ze in MATLAB, een veelgebruikt platform voor technisch rekenen. Eén programma animeert een virtuele versie van de schaaf, waarbij de krukas roteert en de gereedschappen in tegengestelde richting schuiven. Een tweede programma geeft grafieken van hoe positie, snelheid en versnelling van belangrijke punten in de tijd veranderen. De resulterende curves volgen de bekende sinus- en cosinuspatronen die men verwacht van een kruk-schijf/schuifsysteem: de gereedschappen zwaaien soepel heen en weer met een slag gelijk aan twee keer de krukasstraal, terwijl hun snelheden en versnellingen in regelmatige cycli variëren. Deze numerieke resultaten komen overeen met handberekeningen en bevestigen dat beide theoretische benaderingen consistent zijn.
Wat het betekent voor echte machines
Voor niet‑specialisten is de kernuitkomst dat de auteurs een betrouwbaar bewegingsmodel hebben geleverd van een tijdbesparende, tweezijdige schaafmachine en hebben aangetoond dat twee verschillende theoretische wegen het eens zijn over het gedrag. Dit geeft ontwerpers een stevige basis voor het dimensioneren van onderdelen, het kiezen van snelheden en het voorspellen van gereedschapsbewegingen voordat hardware wordt gebouwd. Hoewel het huidige werk uitgaat van ideale omstandigheden — waarbij snijkrachten, zware belastingen en trillingen buiten beschouwing blijven — vormt het de basis voor vervolgonderzoek waarin deze effecten wel worden meegenomen. Uiteindelijk kan dergelijke modellering ingenieurs helpen schaafmachines af te stemmen die sneller snijden, langer meegaan en in het dagelijks industrieel gebruik minder energie verbruiken.
Bronvermelding: Gutata, G.R., Kebede, G.A. & Abbera, G.H. Kinematic modeling and simulation of dual-sided shaper machine using Newton-Euler and Lagrangian approaches. Sci Rep 16, 10455 (2026). https://doi.org/10.1038/s41598-026-40795-x
Trefwoorden: tweezijdige schaaf, Scotch-yoke mechanisme, kinematische modellering, Newton–Euler en Lagrange, MATLAB-simulatie