Clear Sky Science · en
Kinematic modeling and simulation of dual-sided shaper machine using Newton-Euler and Lagrangian approaches
Why two-sided cutting matters
In many factories, shaping machines are used to carve flat surfaces on metal parts. Traditional versions of these machines cut only on one side: the tool removes material while it moves forward, then glides back without doing any work. This pause wastes time and energy. The paper summarized here explores a smarter design that cuts on both sides at once and shows, using careful motion analysis and computer simulation, how such a machine can run smoothly, reliably, and efficiently.
A machine that works both ways
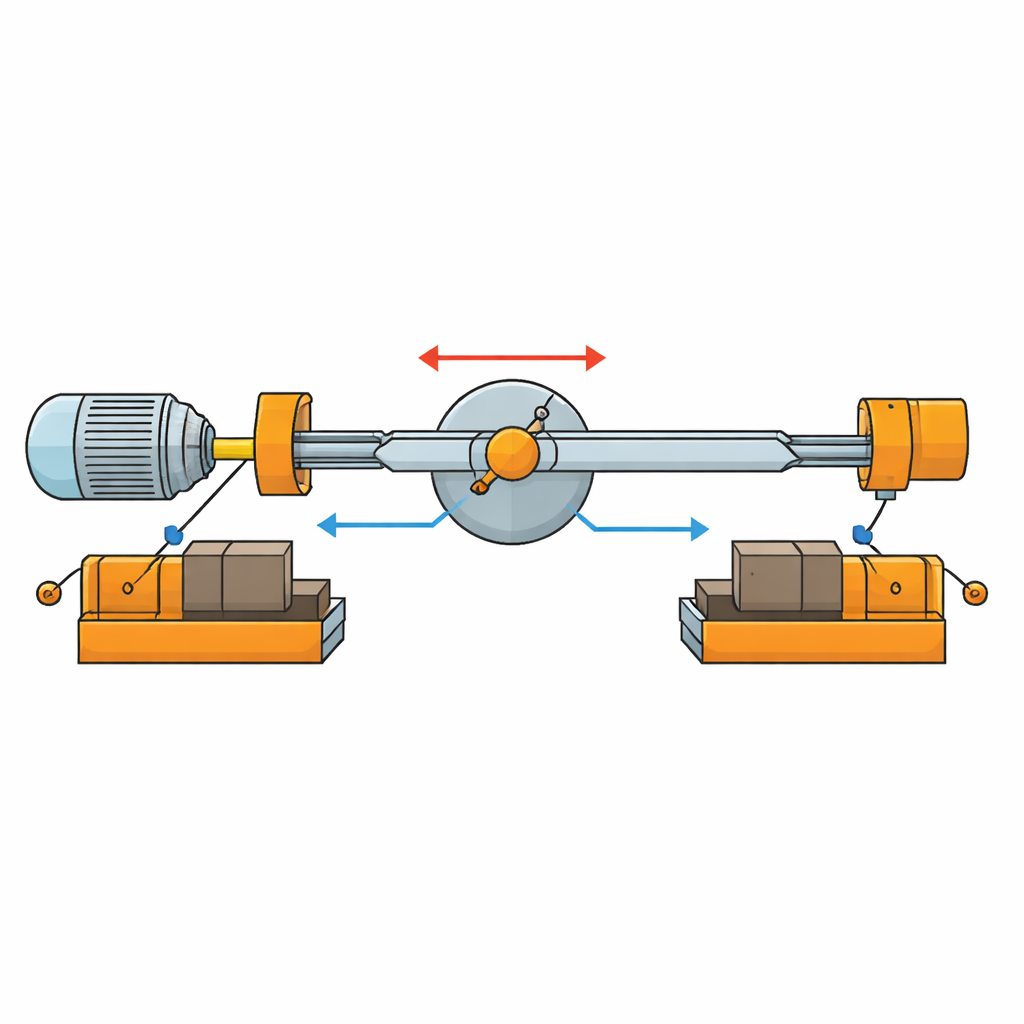
The study focuses on a compact "dual-sided" shaper. Instead of a single cutting tool working in one direction, this design uses two tools facing opposite sides of the workpiece. As one tool finishes its cutting stroke and would normally return empty, the other tool takes its turn cutting on the opposite side. In effect, a motion that used to be wasted is turned into productive work, nearly doubling the rate at which material can be removed without needing a second motor or a much larger machine.
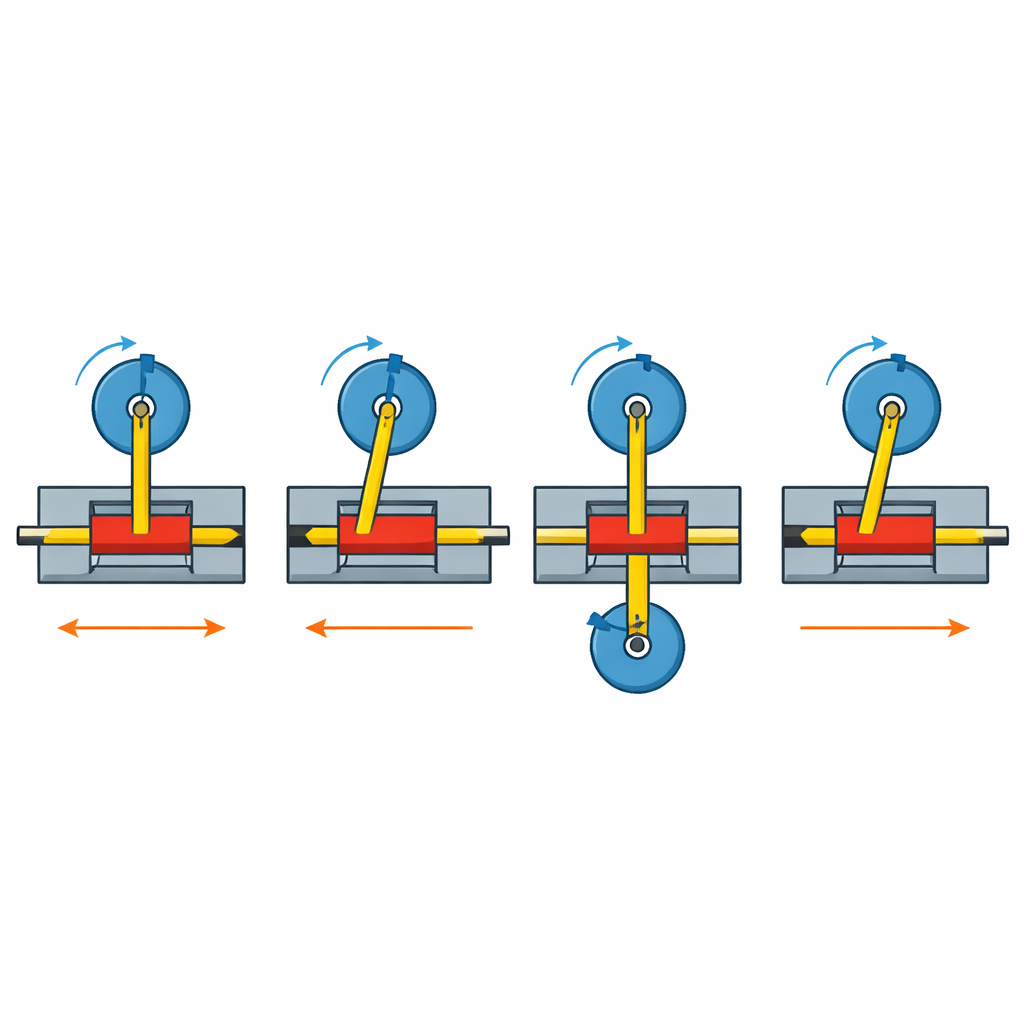
How spinning turns into sliding
At the heart of this dual-sided shaper is a classic mechanical arrangement called a Scotch yoke. A rotating crank, driven by a motor through belts and pulleys, carries a pin that slides inside a slot in a bar. As the crank spins, the pin forces the bar to move back and forth in a straight line. In this design, the slotted bar is linked to connecting rods that drive the two cutting tools on opposite sides. The authors lay out simple geometric relationships that describe how far each tool moves, how quickly it travels, and how its motion depends on the radius of the crank and the layout of the mechanism.
Turning motion into equations
To go beyond a rough sketch and ensure smooth operation, the team builds a full mathematical model of the machine’s motion. They treat the moving parts—the crank, yoke, connecting rods, tools, and pulleys—as a system whose speeds and accelerations can be described by equations. They use two classic approaches from mechanics. The Newton–Euler method tracks how the kinetic energy of each part changes with time, while the Lagrange method starts from the difference between kinetic and potential energy. Under realistic simplifications, such as neglecting small friction and belt stretch, both methods lead to the same compact equation of motion for the crank angle and, by extension, for the sliding tools.
Checking the math on a computer
To verify that these equations truly capture how the machine would move, the authors implement them in MATLAB, a widely used technical computing platform. One program animates a virtual version of the shaper, showing the crank rotating and the tools sliding in opposite directions. A second program plots how position, speed, and acceleration of key points change over time. The resulting curves follow the familiar sine and cosine patterns expected from a crank–slider system: the tools swing smoothly back and forth with a stroke equal to twice the crank radius, while their speeds and accelerations vary in regular cycles. These numerical results match hand calculations and confirm that both mathematical approaches are consistent.
What it means for real machines
For non-specialists, the central outcome is that the authors have produced a reliable motion model of a time-saving, dual-sided shaping machine and shown that two different theoretical routes agree on how it behaves. This gives designers a solid foundation for sizing parts, choosing speeds, and predicting how the tools will move before building hardware. Although the present work assumes ideal conditions—ignoring cutting forces, heavy loads, and vibration—it lays the groundwork for future studies that include these effects. Ultimately, such modeling can help engineers tune shaper machines that cut faster, last longer, and consume less energy in everyday industrial use.
Citation: Gutata, G.R., Kebede, G.A. & Abbera, G.H. Kinematic modeling and simulation of dual-sided shaper machine using Newton-Euler and Lagrangian approaches. Sci Rep 16, 10455 (2026). https://doi.org/10.1038/s41598-026-40795-x
Keywords: dual-sided shaper, Scotch yoke mechanism, kinematic modeling, Newton-Euler and Lagrange, MATLAB simulation