Clear Sky Science · ru
Обнаружение мелких плавающих объектов в руслах рек на основе улучшенного YOLOv7
Почему важно замечать мелкий мусор в реках
Реки и каналы часто несут мелкие кусочки мусора — бутылки, листья, фрагменты пластика — которые трудно заметить, но они могут серьезно вредить экосистемам, безопасности при паводках и инфраструктуре. Дроны и стационарные камеры обещают непрерывный мониторинг, однако даже продвинутые алгоритмы с трудом выделяют эти маленькие, быстро движущиеся объекты на мерцающей, постоянно меняющейся поверхности воды. В этом исследовании предложен новый подход, который позволяет компьютерам обнаруживать такие мелкие плавающие предметы в речных сценах точнее и быстрее, что расширяет возможности для очищения водоемов и повышения безопасности операций.
Проблема «видения» через движущуюся воду
Наблюдая за рекой на видео, человеческий глаз быстро замечает плавающий мусор, даже когда солнечные блики сверкают на поверхности и волны непредсказуемо рябят. Для компьютера это гораздо сложнее. Формы мелких целей меняются по мере их качания на воде, отражения имитируют яркие объекты, а тени могут скрывать тусклые предметы. Стандартные системы детекции рисуют рамки вокруг всего, что может быть объектом в каждом кадре, но эти рамки сдвигаются и мерцают из кадра в кадр. Такая нестабильность траты вычислительных ресурсов и упрощает потерю отслеживания мелких объектов. В результате получаются пропуски, ложные срабатывания и медленная обработка, особенно когда требуется анализировать тысячи кадров в реальном времени.
Более умный способ договориться о том, что действительно присутствует
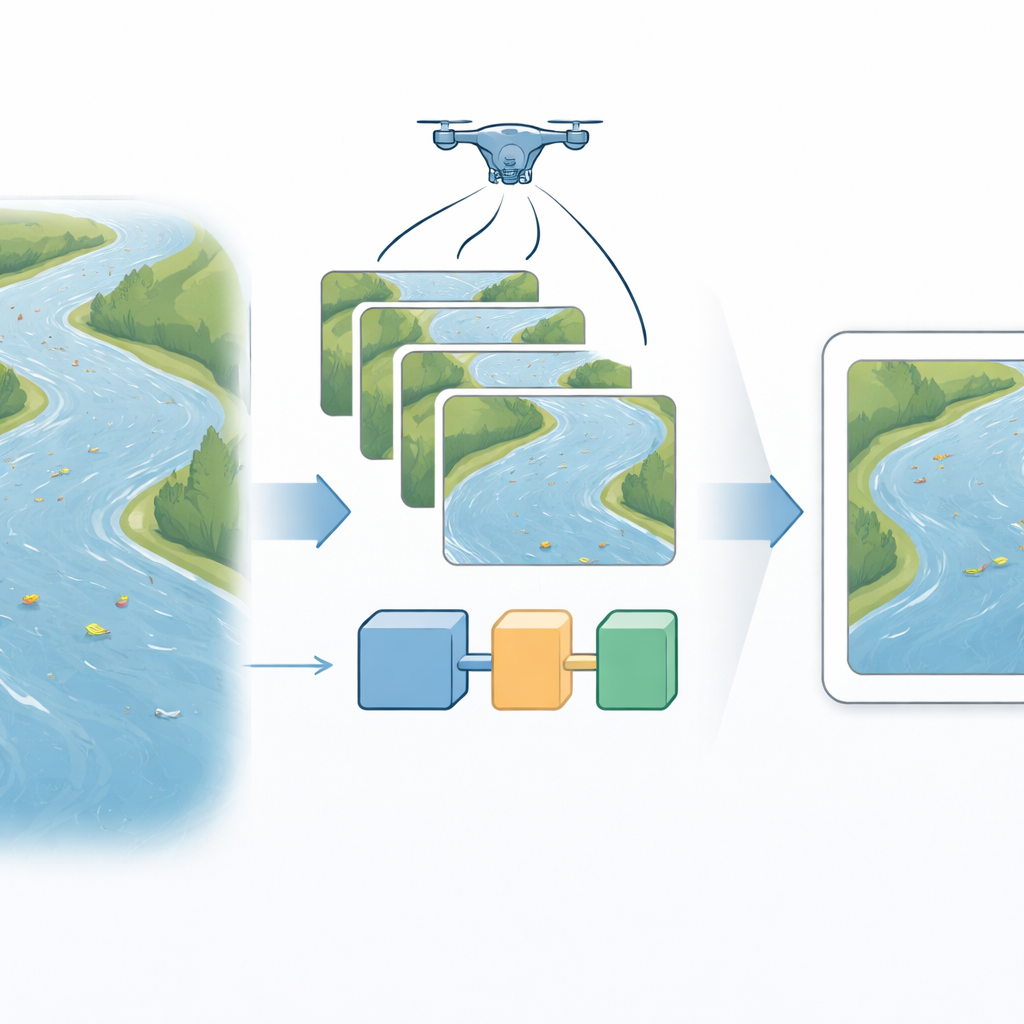
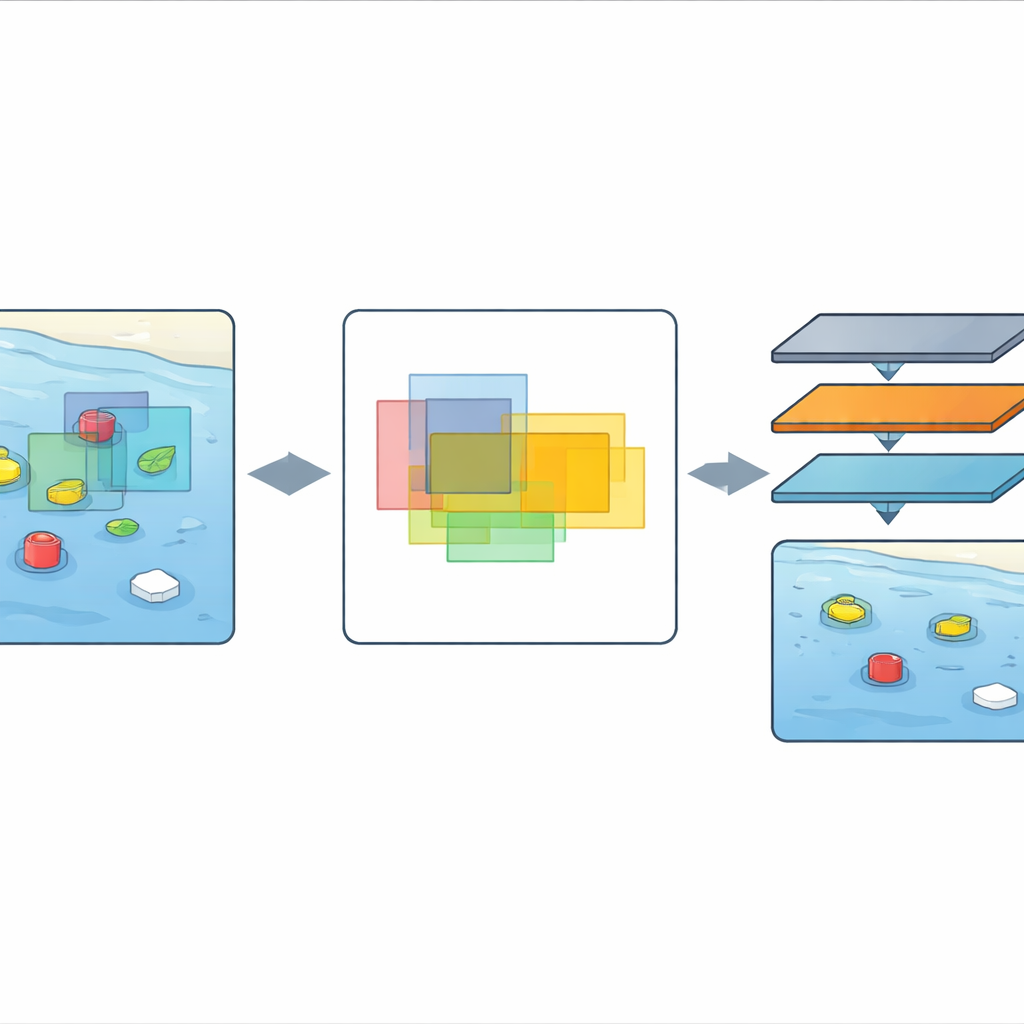
Авторы предлагают новую схему, названную Region-Overlap Detection, в сочетании с облегченным вариантом популярного детектора YOLOv7. Вместо того чтобы обрабатывать каждый кадр отдельно, система рассматривает несколько последовательных кадров и задает простой вопрос: где рамки совпадают во времени? Области, где рамки последовательно перекрываются, считаются более надежными, чем те, что появляются лишь кратко или прыгают. Сосредоточившись сначала на этой стабильной области перекрытия, метод отсеивает многие шумные и нестабильные предположения о местоположении объекта. Только наиболее достоверные рамки передаются для дальнейшего анализа, что дает системе более чистое и устойчивое представление сцены перед выполнением сложных вычислений.
Больше результатов при меньшем числе сетевых операций
Современные системы зрения часто опираются на глубокие стэки слоев обработки, которые обучаются распознавать формы, грани и текстуры. Несмотря на мощь, такие слои дорогие в исполнении и могут «заглушать» тонкие сигналы от мелких объектов. Новый метод сохраняет общую идею YOLOv7, но целенаправленно использует меньше таких этапов обработки, активируя их только там, где анализ на основе перекрытия указывает на присутствие реального объекта. Слои, которые в основном видят фон воды или случайный шум, пропускаются. Эта стратегия «минимальной свертки» уменьшает общий объем вычислений, сохраняя при этом четкие границы мелких плавающих предметов. Фактически сеть концентрирует усилия там, где это наиболее важно, вместо равного обращения со всеми пикселями.
Проверка метода на реальных реках
Чтобы оценить практическую эффективность подхода, команда обучила и протестировала его на видеозаписях с дронов реальных рек, используя большой набор данных из тысяч размеченных изображений, содержащих почти сорок тысяч плавающих объектов разных размеров. Они также проверили работоспособность на дополнительных публичных наборах данных и длительных видеопоследовательностях рек с меняющимся освещением, течением и углами обзора. По сравнению с оригинальным YOLOv7 и несколькими более новыми детекторами новая система обнаружила больше реальных объектов, пропусков стало меньше, а скорость анализа кадров увеличилась. В исследовании сообщается о среднем значении точности (mAP) выше 73 процентов и полноте выше 70 процентов для мелких плавающих объектов, а также о заметном приросте скорости обработки и снижении числа параметров и операций в сети.
Что это значит для чище и безопаснее водоемов
Проще говоря, в статье показано, что стабилизация того, «что компьютер считает видимым» между кадрами, а затем сокращение ненужных вычислений значительно повышает способность системы обнаруживать мелкие кусочки мусора на бурлящей поверхности воды. Хотя метод еще требует испытаний в более широком спектре рек и условий, он уже превосходит несколько известных моделей в сложных речных сценах. Это делает его перспективным компонентом для систем мониторинга в реальном времени, устанавливаемых на дронах, мостах или береговых станциях. Такие системы могли бы помочь городам и экологическим службам отслеживать мусор, управлять рисками паводков и оперативно реагировать на загрязнения, превращая сырые видеопотоки в надежную, пригодную для действий информацию.
Цитирование: Yang, W., Zhang, B., Guo, S. et al. Small target detection of floating objects in river channels based on improved YOLOv7. Sci Rep 16, 11423 (2026). https://doi.org/10.1038/s41598-026-40688-z
Ключевые слова: обнаружение мусора в реках, мониторинг рек с дронов, обнаружение мелких объектов, компьютерное зрение для воды, улучшения YOLOv7