Clear Sky Science · nl
Detectie van kleine doelwitten van drijvende voorwerpen in rivierkanalen op basis van verbeterde YOLOv7
Waarom het opsporen van klein afval in rivieren ertoe doet
Rivieren en kanalen voeren vaak kleine stukjes zwerfvuil mee—flessen, bladeren, plasticfragmenten—die moeilijk te zien zijn maar grote problemen kunnen veroorzaken voor ecosystemen, overstromingsveiligheid en menselijke infrastructuur. Drones en vaste camera’s beloven continue monitoring, maar zelfs geavanceerde computerprogramma’s hebben moeite om deze kleine, snel bewegende objecten te onderscheiden van het glinsterende, voortdurend veranderende water. Deze studie presenteert een nieuwe manier om computers te leren zulke kleine drijvende voorwerpen in rivierscènes nauwkeuriger en sneller te vinden, wat de deur opent naar schonere waterwegen en veiligere operaties.
De uitdaging van kijken door bewegend water
Als je een rivier in video bekijkt, neemt je oog snel drijvend puin waar, zelfs als zonlicht op het oppervlak flonkerend weerkaatst en golven onvoorspelbaar rimpelen. Voor een computer is dit veel lastiger. De vormen van kleine doelwitten veranderen terwijl ze op het water deinen, reflecties bootsen felle objecten na en schaduwen kunnen zwakke objecten verbergen. Standaard detectiesystemen tekenen in elk videoframe kaders om alles wat mogelijk een object is, maar die kaders verschuiven en flikkeren van frame naar frame. Die instabiliteit verspilt rekenkracht en maakt het gemakkelijk om kleine objecten volledig uit het oog te verliezen. Het resultaat is een mengeling van gemiste detecties, valse alarmen en trage verwerking, vooral wanneer duizenden frames in realtime geanalyseerd moeten worden.
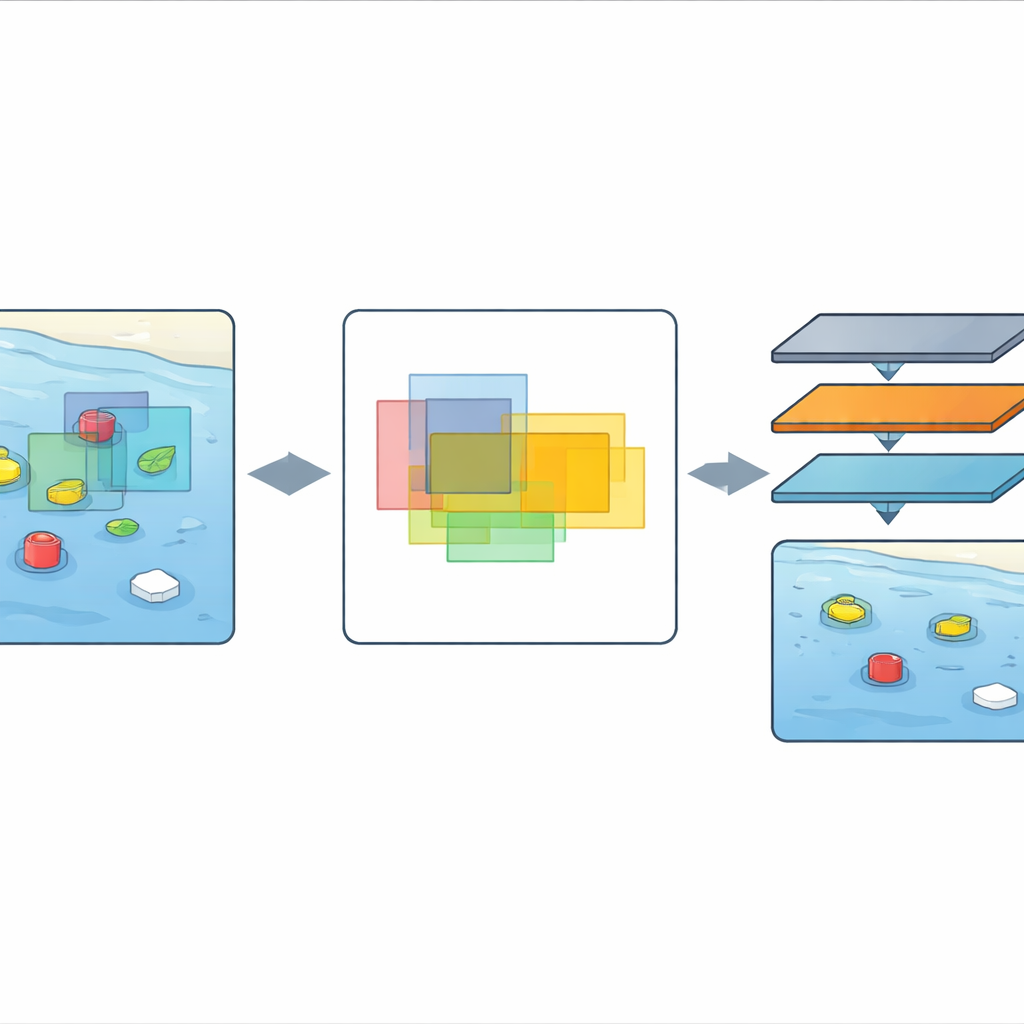
Een slimmer manier om overeenstemming te vinden over wat echt aanwezig is
De auteurs stellen een nieuw raamwerk voor genaamd Region-Overlap Detection, gecombineerd met een afgeslankte versie van een populaire detector bekend als YOLOv7. In plaats van elk frame afzonderlijk te behandelen, bekijkt het systeem meerdere opeenvolgende frames en stelt een eenvoudige vraag: waar lijnen de kaders zich in de tijd op elkaar? Gebieden waar kaders consequent overlappen, worden als betrouwbaarder beschouwd dan die alleen kort verschijnen of rondspringen. Door eerst te focussen op deze stabiele overlapregio filtert de methode veel lawaaierige en onstabiele gokken over waar een object zou kunnen zijn. Alleen de meest betrouwbare kaders worden doorgegeven voor diepere analyse, waardoor het systeem een schoner, stabieler beeld van de scène krijgt voordat er zware berekeningen plaatsvinden.
Meer doen met minder netwerkstappen
Moderne visiesystemen vertrouwen vaak op diepe stapels verwerkingslagen die leren vormen, randen en texturen te herkennen. Hoewel krachtig, zijn deze lagen duur in gebruik en kunnen ze de subtiele signalen van kleine objecten overspoelen. De nieuwe methode behoudt het algemene YOLOv7-idee maar gebruikt opzettelijk minder van deze verwerkingsstappen, en activeert ze alleen waar de overlapgebaseerde analyse aangeeft dat een echt object aanwezig is. Lagen die voornamelijk achtergrondwater of willekeurig lawaai zouden zien, worden overgeslagen. Deze “minimum convolution”-strategie vermindert de totale hoeveelheid berekening terwijl de scherpe grenzen rond kleine drijvende objecten behouden blijven. In feite concentreert het netwerk zijn inspanning daar waar het het meest telt, in plaats van elke pixel gelijk te behandelen.
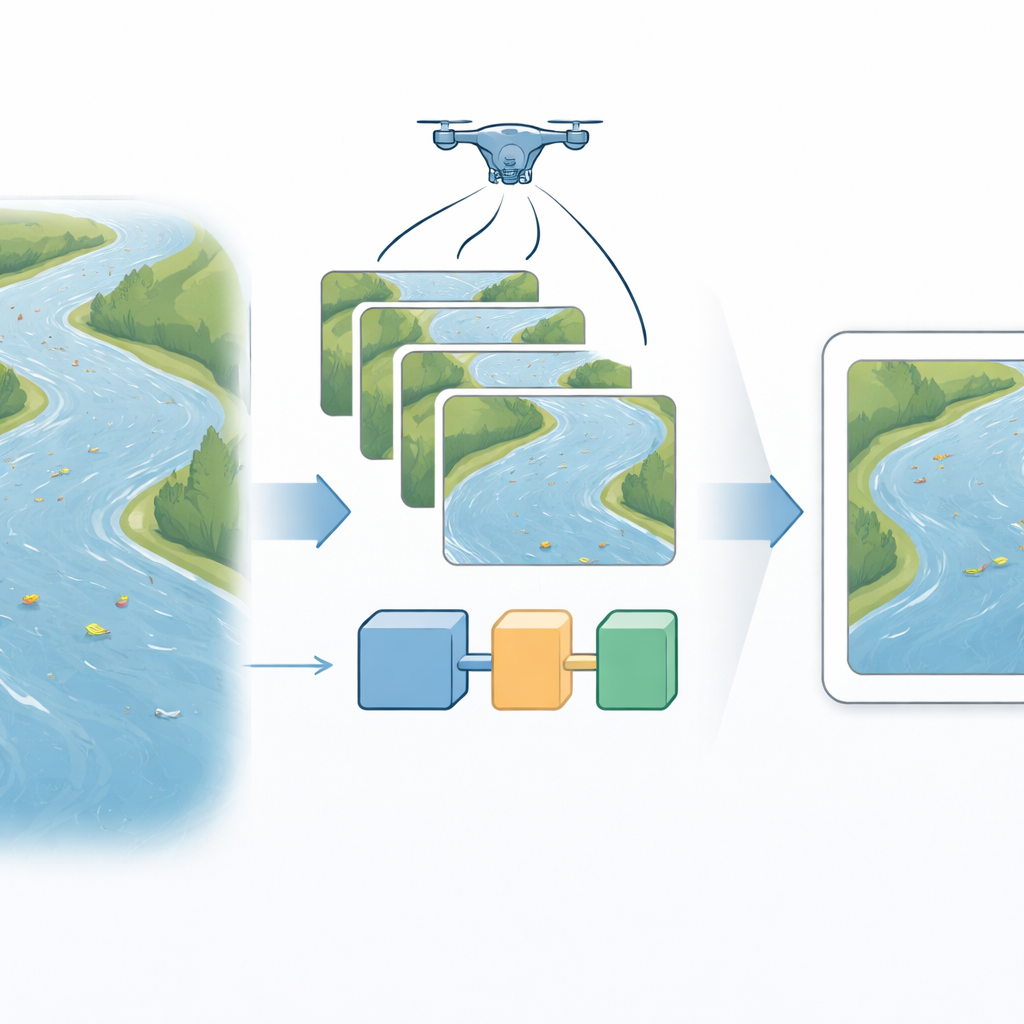
De methode testen op echte rivieren
Om te zien hoe goed deze aanpak in de praktijk werkt, trainde en testte het team het op dronevideo’s van echte rivieren, met een grote dataset van duizenden geannoteerde beelden met bijna veertigduizend drijvende objecten van verschillende groottes. Ze controleerden ook de prestaties op aanvullende openbare datasets en lange rivervideo’s met wisselend licht, waterstroom en kijkhoeken. Vergeleken met de originele YOLOv7 en verschillende nieuwere detectors vond het nieuwe systeem meer echte objecten, miste er minder en analyseerde het frames sneller. De studie meldt een mean average precision van meer dan 73 procent en een recall van meer dan 70 procent voor kleine drijvende objecten, samen met een merkbare toename in verwerkingssnelheid en een vermindering van het aantal netwerkparameters en vereiste bewerkingen.
Wat dit betekent voor schonere en veiligere waterwegen
In eenvoudige bewoordingen laat het artikel zien dat het stabiliseren van wat de computer “denkt te zien” over frames heen, en het wegsnijden van onnodige verwerking, het veel beter maakt in het opsporen van kleine stukjes puin die op levendige wateroppervlakken bewegen. Hoewel de methode nog in een breder scala aan rivieren en omstandigheden getest moet worden, presteert ze al beter dan verschillende bekende modellen in uitdagende rivierscènes. Dat maakt het een veelbelovend bouwblok voor realtime monitoringsystemen op drones, bruggen of oeverstations. Dergelijke systemen zouden steden en milieuinstanties kunnen helpen zwerfvuil te volgen, overstromingsrisico’s te beheren en snel te reageren op verontreinigingsincidenten, door ruwe videobeelden om te zetten in betrouwbare, bruikbare informatie.
Bronvermelding: Yang, W., Zhang, B., Guo, S. et al. Small target detection of floating objects in river channels based on improved YOLOv7. Sci Rep 16, 11423 (2026). https://doi.org/10.1038/s41598-026-40688-z
Trefwoorden: detectie van rivierafval, drone bewaking van rivieren, detectie van kleine objecten, computer vision voor water, verbeteringen van YOLOv7