Clear Sky Science · pt
Rede neural wavelet para redução de ripple de torque DITC em motores de relutância comutada em veículos elétricos
Por que motores elétricos mais suaves importam
Carros elétricos prometem viagens silenciosas e eficientes, mas os motores que impulsionam suas rodas ainda podem gerar vibração e ruído indesejados. Um tipo de motor promissor para veículos futuros, o motor de relutância comutada, é resistente, barato e dispensa ímãs de terras raras, porém sofre com um ripple de torque pronunciado — pequenas subidas e quedas na força de torção que causam vibração. Este artigo explora um método de controle inteligente que utiliza uma rede neural especializada para atenuar esses ripples, tornando esses motores robustos mais agradáveis e eficientes para o uso diário. 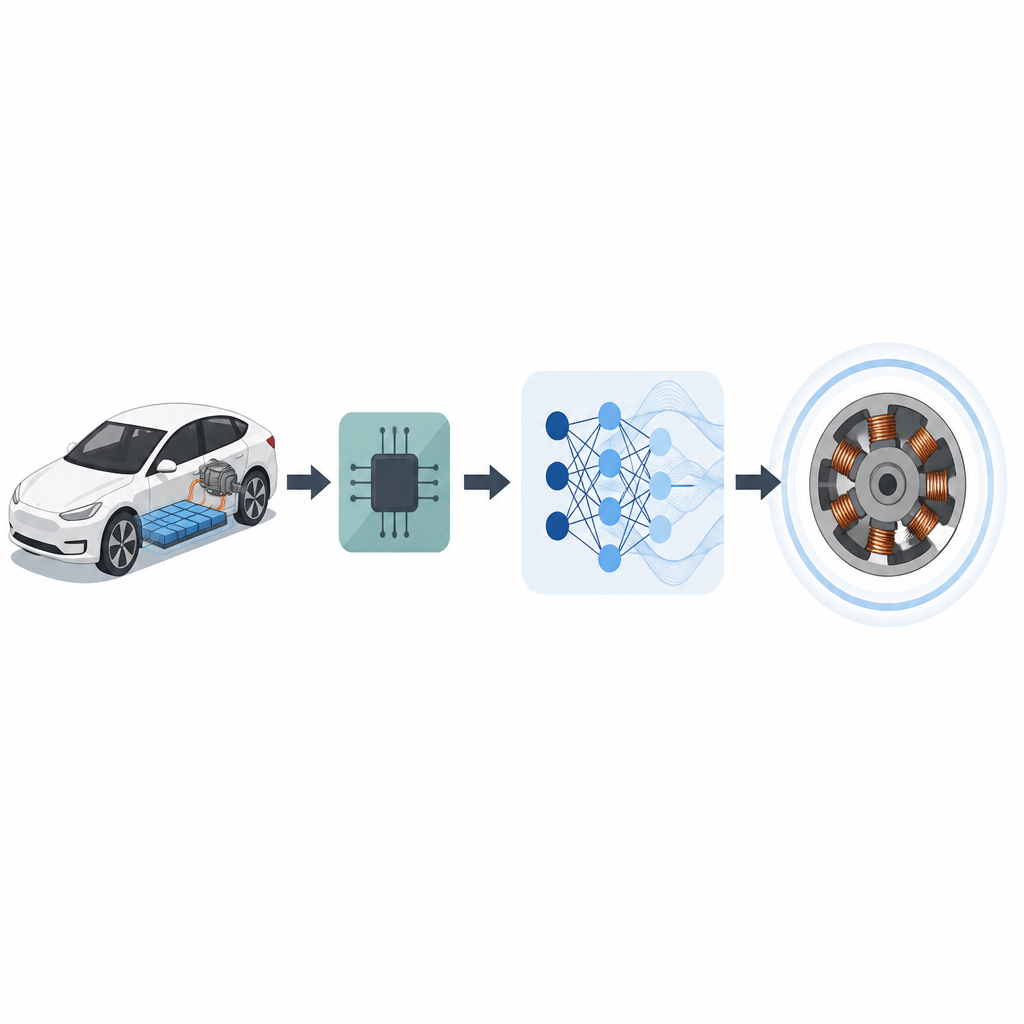
Um motor resistente com passeio áspero
Os motores de relutância comutada são atraentes para veículos elétricos por terem estrutura simples, alta confiabilidade e não dependerem de materiais magnéticos escassos. A desvantagem vem da forma como geram força: à medida que os dentes do rotor se alinham com os dentes do estator energizados, o torque pulsa naturalmente. Esquemas de controle tradicionais que regulam corrente em ondas quadradas são fáceis de implementar, mas deixam variações de torque grandes. Controles mais avançados baseados em torque podem reagir mais rápido, porém ainda enfrentam dificuldades com o comportamento magnético fortemente não linear dessas máquinas, especialmente durante os breves momentos em que várias fases do motor se sobrepõem e o torque é transferido de uma para outra.
Ensinando o controlador a prever
Os autores se baseiam em uma estratégia conhecida como controle direto de torque instantâneo, onde o controlador compara diretamente o torque desejado com o torque estimado e comuta rapidamente a eletrônica de potência para corrigir qualquer erro. Em sua forma básica, essa abordagem ainda produz ripples consideráveis. O estudo adiciona uma rede neural wavelet compacta entre o controlador de velocidade e o controlador de torque. Em vez de enviar um alvo de torque fixo, este módulo inteligente observa tanto o erro de torque quanto a sua taxa de variação e então remodela sutilmente a referência de torque em tempo real. Wavelets, que capturam padrões em tempo e escala, ajudam a rede a aprender o comportamento de torque complexo e dependente da posição do motor usando apenas dois neurônios ocultos e sete parâmetros ajustados.
Otimizar uma vez, funcionar em qualquer lugar
Para evitar um modelo pesado que exija re-treinamento constante, a equipe usa um algoritmo de otimização chamado Equilibrium Optimizer para ajustar a rede neural apenas uma vez em um ponto de operação cuidadosamente escolhido: ligeiramente acima da velocidade nominal e sob carga nominal, onde o ripple de torque é alto mas a corrente permanece bem controlada. O algoritmo busca valores de parâmetros que minimizem conjuntamente o ripple de torque e o erro global de torque. O conjunto resultante de sete parâmetros é então fixado e usado para todas as velocidades e cargas. Paralelamente, o mesmo otimizador é empregado para refinar os ângulos em que cada fase do motor é comutada em uma grade de velocidades e torques, e os melhores valores são armazenados em tabelas de consulta simples dentro do controlador. 
Do modelo computacional ao banco de ensaio
Simulações extensas em um motor de relutância comutada trifásico 12/8 mostram que o novo controlador entrega torque médio mais alto, perfis de torque visivelmente mais suaves e correntes de pico semelhantes ao esquema convencional. A melhoria aparece em uma ampla faixa de velocidades e tanto em cargas leves quanto pesadas. Experimentos em um conjunto experimental real confirmam esses achados. Em testes em malha aberta e em cenários realistas de malha fechada com degraus de velocidade e mudanças abruptas de carga, o controlador proposto reduz consistentemente o ripple de torque medido em cerca de 16% para cargas leves e quase 29% para cargas pesadas. O custo é uma maior frequência de comutação e um aumento modesto do tempo de computação, mas ambos permanecem dentro de limites industriais comuns.
O que isso significa para acionamentos elétricos futuros
Em termos simples, o estudo mostra que uma rede neural pequena e bem treinada pode agir como um filtro inteligente entre a demanda de torque do motorista e o motor, remodelando o comando para cancelar grande parte do pulsar inerente a um motor de relutância comutada. Como a rede é simples, treinada apenas uma vez e emparelhada com ângulos de comutação otimizados, o controle geral permanece prático para hardware em tempo real. Para veículos elétricos e outras aplicações exigentes, essa abordagem oferece um caminho para usar motores robustos e sem ímãs, reduzindo vibração e melhorando a qualidade de condução sem redesenhar o motor em si.
Citação: Saleh, A.L., Hamouda, M., Számel, L. et al. Wavelet neural network based reduced-ripple DITC of switched reluctance motors in electric vehicles. Sci Rep 16, 15564 (2026). https://doi.org/10.1038/s41598-026-46371-7
Palavras-chave: motor de relutância comutada, ripple de torque, acionamento de veículo elétrico, controle por rede neural, otimização de controle de motor