Clear Sky Science · he
רשת עצבית גללית מבוססת להפחתת גלים ב-DITC של מנועים רלטוקטנטיים מנותקים ברכבים חשמליים
למה מנועים חשמליים חלקים חשובים
מכוניות חשמליות מבטיחות נסיעה שקטה ויעילה, אך המנועים שמניעים את הגלגלים עדיין עלולים לייצר רעד ורעש בלתי רצויים. סוג מנוע פופולרי לרכבים עתידיים, המנוע הרלטוקטנטי המנותק, חזק וזול ומונע שימוש במגנטים נדירים, אך סובל מתנודת מומנט בולטת — העליות והירידות הקטנות בכוח הסיבוב שגורמות לרטט. מאמר זה חוקר שיטת בקרה חכמה שמשתמשת ברשת עצבית מיוחדת כדי להחליק את התנודות הללו, מה שהופך את המנועים הקשיחים האלה לנעימים ויעילים יותר לנהיגה יומיומית. 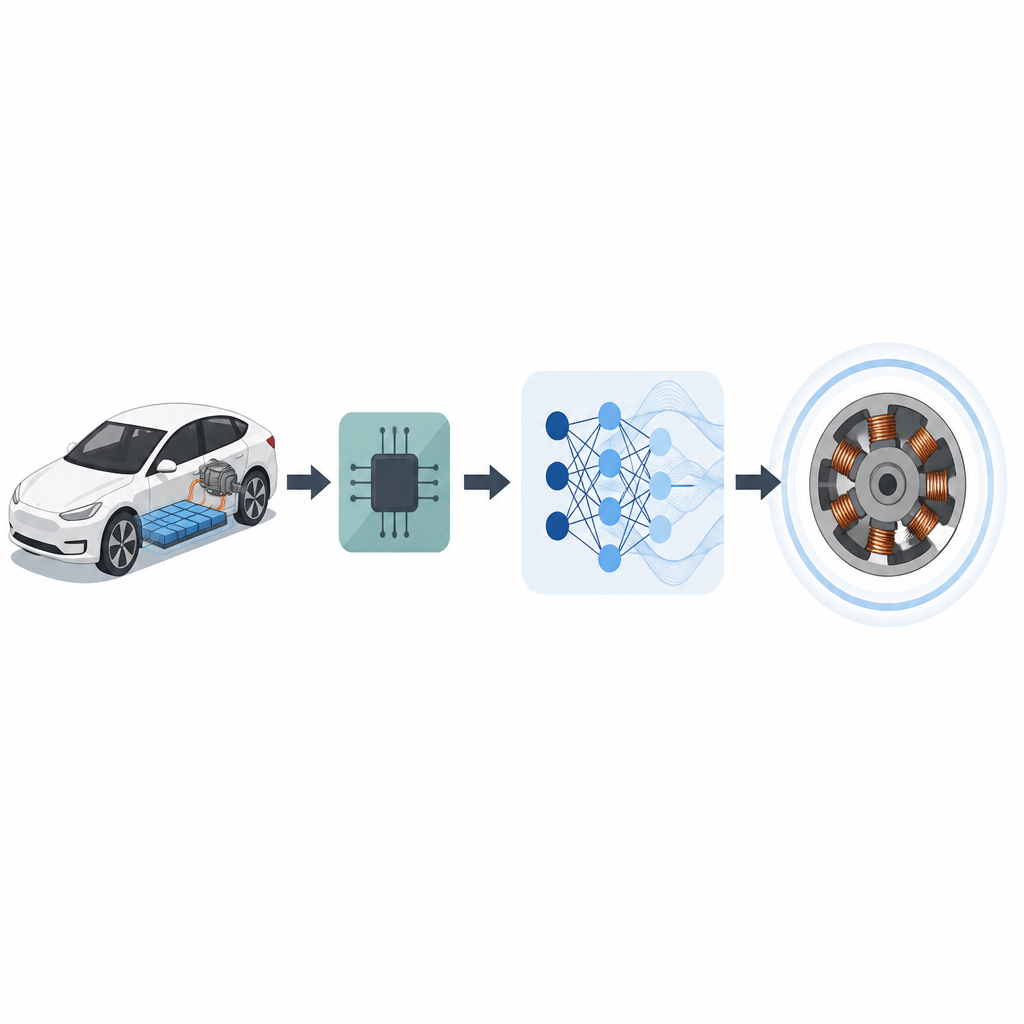
מנוע קשוח עם נסיעה מחוספסת
מנועים רלטוקטנטיים מנותקים מושכים עבור רכבים חשמליים בזכות מבנה פשוט, אמינות גבוהה וחוסר תלות בחומרי מגנט נדירים. החיסרון שלהם נובע מאופן יצירת הכוח: כאשר שיני הרוטור מתיישרות עם שיני הסטטור הממומנות, המומנט מגיע בפולסים טבעיים. סכמות בקרה מסורתיות שמווסתות זרם בגל מרובע קלות ליישום אך משאירות תנודות מומנט גדולות. בקרים מתקדמים המבוססים על מומנט יכולים להגיב מהר יותר, אך הם עדיין נאבקים בהתנהגות המגנטית החזקה הלא־ליניארית של המנועים האלה, במיוחד ברגעים קצרים שבהם מספר פאוזות חופפות ומעבירות מומנט זו לזו.
ללמד את הבקר לחשוב קדימה
המחברים בונים על אסטרטגיה המוכרת כבקרת מומנט מיידית ישירה, שבה הבקר משווה ישירות בין המומנט המבוקש למומנט המשוער ומעביר במהירות את האלקטרוניקה כדי לתקן כל שגיאה. בצורתה הבסיסית גישה זו עדיין מייצרת תנודות משמעותיות. המחקר מוסיף רשת עצבית גללית קומפקטית בין בקר המהירות לבקר המומנט. במקום לשלוח יעד מומנט קבוע, המודול החכם בוחן גם את שגיאת המומנט וגם את קצב השינוי שלה, ואז מעצב בעדינות את מומנט הייחוס בזמן אמת. גלויים, שתופסים דפוסים גם בזמן וגם בקנה מידה, מסייעים לרשת ללמוד את התנהגות המומנט המורכבת התלויה במיקום של המנוע באמצעות שני נוירונים מוסתרים בלבד ושבעה פרמטרים מכוונים.
לאמץ אופטימיזציה אחת — לעבוד בכל מקום
כדי להימנע ממודל כבד שדורש אימון מתמשך, הצוות משתמש באלגוריתם אופטימיזציה הנקרא Equilibrium Optimizer לכייל את הרשת רק פעם אחת בנקודת תפעול שנבחרה בקפידה: מעט מעל למהירות הנקובה ובמעמסה נקובה, שם תנודת המומנט גבוהה אך הזרם נשלט היטב. האלגוריתם מחפש ערכי פרמטרים שממזערים במשותף את תנודת המומנט ואת שגיאת המומנט הכוללת. קבוצת הפרמטרים של שבעת המשתנים מתקבעת ואז משמשת לכל המהירויות והעומסים. במקביל, אותו ממצב משתמש לכיוון זוויות המתג עבור כל פאזה של המנוע ברשת של מהירויות ומומנטים, והערכים הטובים נשמרים בטבלאות עיון פשוטות בתוך הבקר. 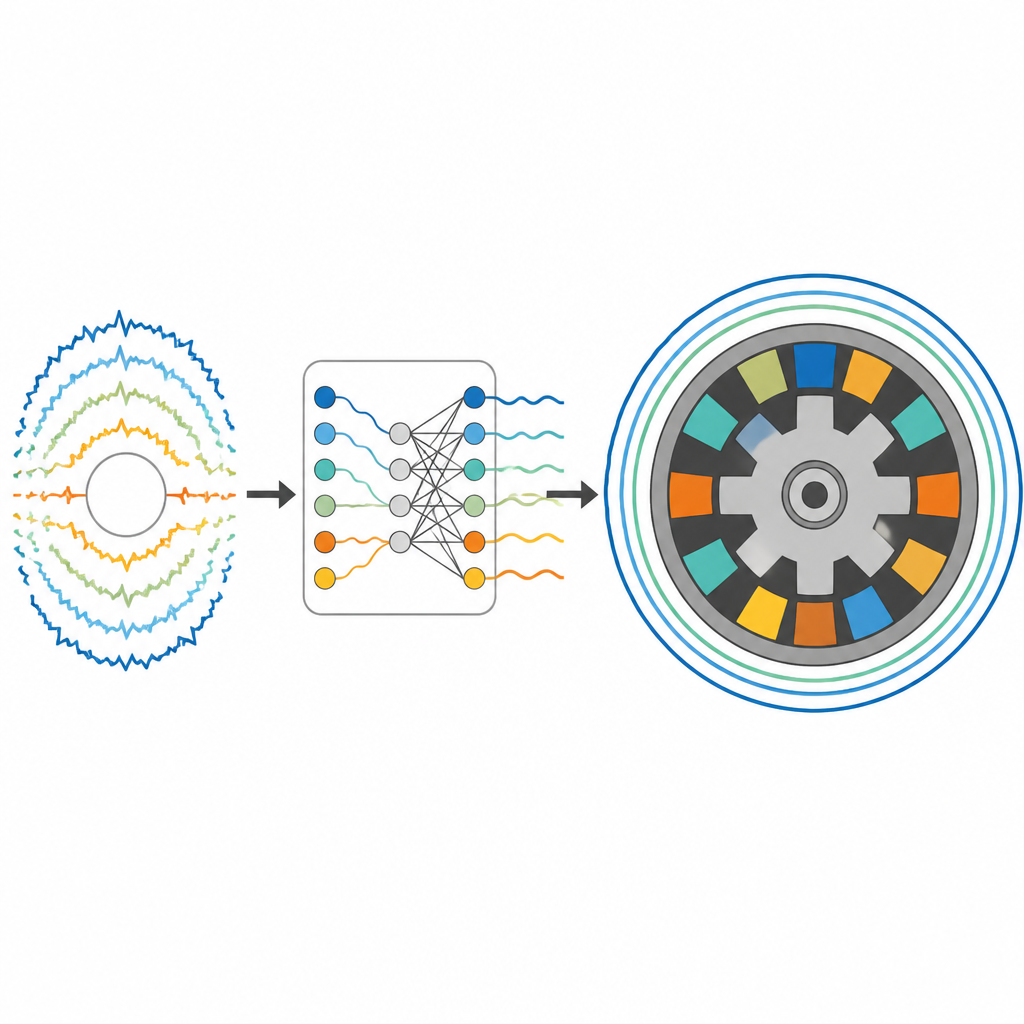
מדגם ממודל מחשב לעמדת ניסוי
סימולציות נרחבות על מנוע רלטוקטנטי מנותק בתצורה תלת־פאזית 12/8 מראות שהבקר החדש מספק מומנט ממוצע גבוה יותר, פרופילים של מומנט חלקים במידה ניכרת וזרמי שיא דומים בהשוואה לסכמת הבקרה הקונבנציונלית. השיפור מופיע בטווח רחב של מהירויות ובעומסים קלים וכבדים כאחד. ניסויים על מערכת מנוע אמיתית מאשרים את הממצאים. תחת בדיקות לולאה פתוחה ותסריטי נהיגה מציאותיים בלולאה סגורה הכוללים צעדי מהירות ושינויים פתאומיים בעומס, הבקר המוצע מקטין בעקביות את תנודת המומנט הנמדדת בכ‑כ־16% בעומסים קלים וכמעט 29% בעומסים כבדים. המחיר הוא תדירות מתג גבוהה יותר ועלייה צנועה בזמן חישוב, אך שניהם נשארים בגבולות התעשייה המקובלים.
מה המשמעות עבור הנעות חשמליות עתידיות
במלים פשוטות, המחקר מראה שרשת עצבית קטנה ומאומנת היטב יכולה לפעול כמסנן חכם בין דרישת המומנט של הנהג לבין המנוע, מעצבת מחדש את הפקודה כדי לבטל חלק גדול מהדופק הפנימי הטבעי במנוע רלטוקטנטי מנותק. מכיוון שהרשת פשוטה, מאומנת רק פעם אחת ומצומדת לזוויות הפעלה ממוטבות, הבקרה הכוללת נשארת מעשית לחומרה בזמן אמת. לרכבים חשמליים וליישומים תובעניים אחרים, גישה זו מציעה דרך להשתמש במנועים חסונים וללא מגנטים תוך הפחתת רעידות ושיפור איכות הנסיעה מבלי לשנות את עיצוב המנוע עצמו.
ציטוט: Saleh, A.L., Hamouda, M., Számel, L. et al. Wavelet neural network based reduced-ripple DITC of switched reluctance motors in electric vehicles. Sci Rep 16, 15564 (2026). https://doi.org/10.1038/s41598-026-46371-7
מילות מפתח: מנוע רלטוקטנטי מנותק, תנודת מומנט, הנעה לרכב חשמלי, בקרת רשת עצבית, אופטימיזציה של שליטת מנוע