Clear Sky Science · ja
電気自動車用スイッチドリアクタンスモータのリダクテッドリップルDITCに基づくウェーブレットニューラルネットワーク
なぜ電動機の滑らかさが重要か
電気自動車は静かで効率的な移動を約束しますが、車輪を駆動するモータは依然として不快な振動や騒音を生むことがあります。将来の車両で有力なモータタイプであるスイッチドリアクタンスモータは、堅牢で安価、希土類磁石を必要としないという利点がある一方で、トルクリップル(ねじり力の小さな急増・急降下)を強く生じさせ、振動の原因になります。本論文は、これらのリップルを滑らかにするために特殊化したニューラルネットワークを用いる賢い制御手法を検討し、こうした堅牢なモータを日常走行でより快適かつ効率的にする道を探ります。 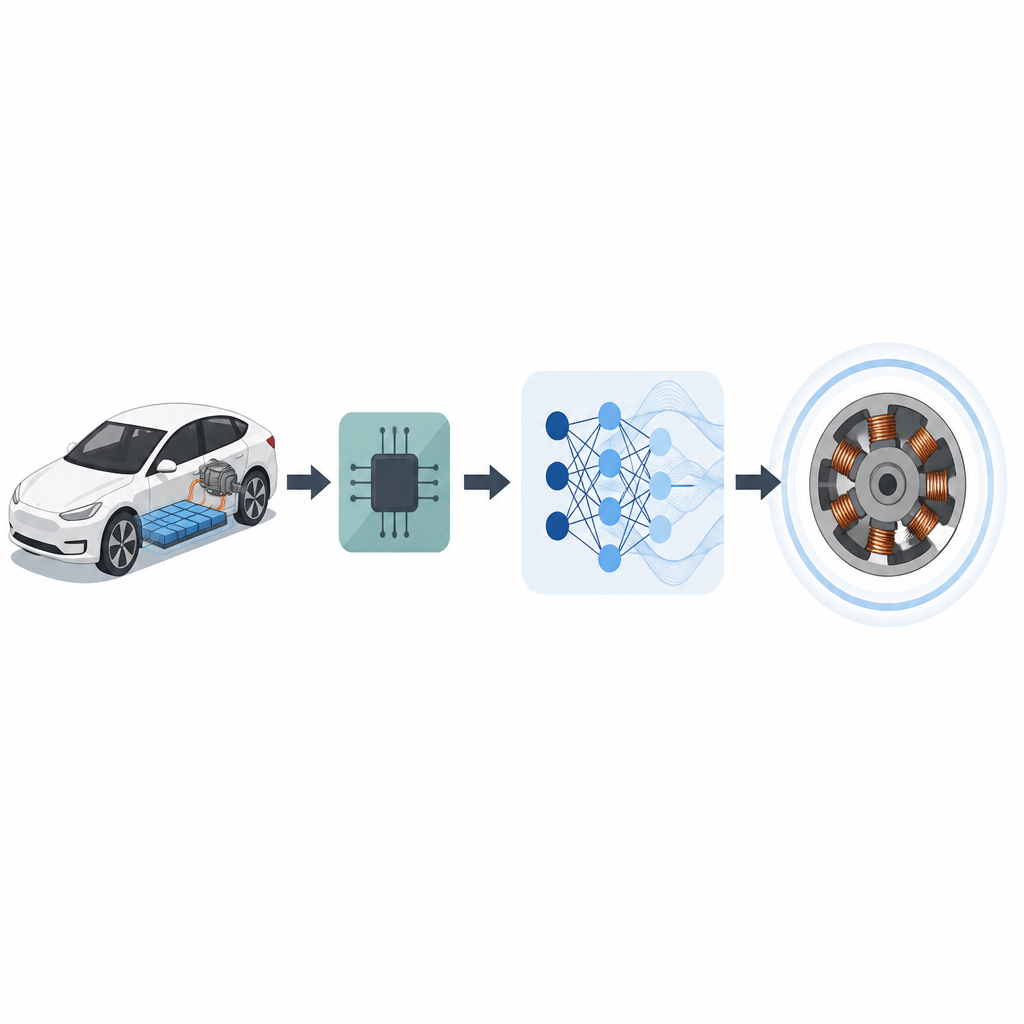
粗い挙動の課題を抱えた堅牢なモータ
スイッチドリアクタンスモータは構造が単純で信頼性が高く、希少な磁性材料に依存しないため電気自動車にとって魅力的です。その欠点は、力を生み出す方式にあります。ロータの歯が励磁された固定子の歯と整列する際にトルクが自然にパルス状になります。方形波による電流制御のような従来の制御方式は実装が容易ですが大きなトルク変動を残します。より高度なトルクベース制御は応答が速いものの、これらの装置に見られる強い非線形な磁気挙動、特に複数相が短時間に重なる位相の移行時には依然として課題を抱えています。
先を見越して考えるようにコントローラを教える
著者らは直接瞬時トルク制御(direct instantaneous torque control)として知られる戦略を基盤としています。この方式では、コントローラが求めるトルクと推定される実際のトルクを直接比較し、誤差を修正するために電力電子装置を迅速にスイッチします。基本形では依然としてかなりのリップルが生じます。本研究では、速度コントローラとトルクコントローラの間にコンパクトなウェーブレットニューラルネットワークを挿入します。このスマートなモジュールは固定のトルク目標を送る代わりに、トルク誤差とその変化率の両方を観測し、参照トルクをリアルタイムで微妙に再形成します。時刻とスケールの両方のパターンを捉えるウェーブレットは、位置依存の複雑なトルク挙動を学習するのに役立ち、わずか二つの隠れニューロンと七つの調整パラメータだけで機能します。
一度最適化すれば、どこでも動く
扱いにくく常時再学習が必要なモデルを避けるため、チームはEquilibrium Optimizerと呼ばれる最適化アルゴリズムを用い、ニューラルネットワークを一度だけ慎重に選んだ動作点で調整します。選んだ点は定格速度よりやや高く、定格負荷で、トルクリップルが高くなる一方で電流は良好に制御されている領域です。アルゴリズムはトルクリップルと全体のトルク誤差を同時に最小化するパラメータ値を探索します。得られた七つのパラメータは固定され、すべての速度と負荷で使用されます。同時に、同じ最適化手法を用いて各相のオン/オフ角を速度・トルクの格子上で最適化し、最良値をコントローラ内の簡単なルックアップテーブルに格納します。 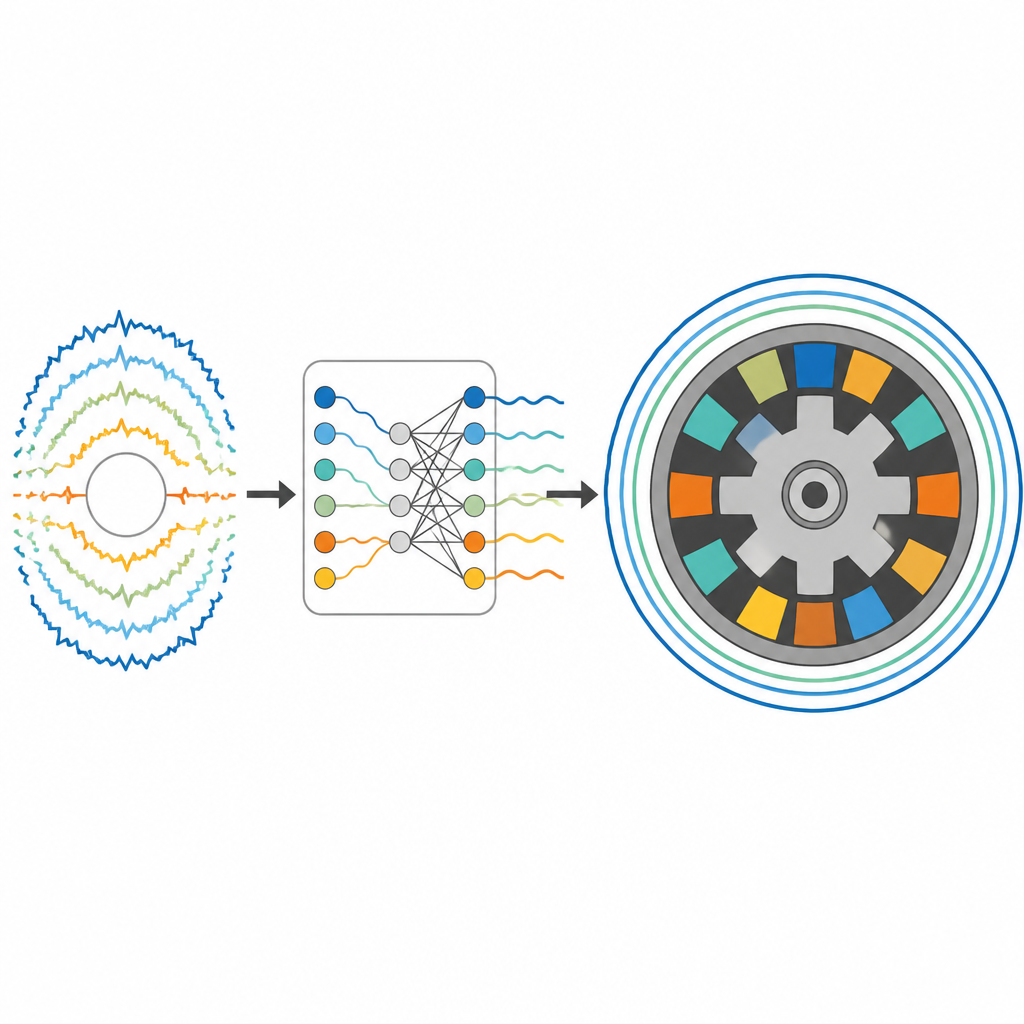
コンピュータモデルからテストベンチへ
三相12/8スイッチドリアクタンスモータの広範なシミュレーションにより、新しいコントローラは従来方式と比べて平均トルクが高く、トルク波形が明らかに滑らかで、ピーク電流は同等であることが示されました。この改善は広い速度域と軽負荷・重負荷の双方で見られます。実機での実験でもこれらの結果が確認されました。オープンループ試験や速度ステップや突発的な負荷変化を伴う現実的なクローズドループ走行シナリオにおいて、提案したコントローラは軽負荷で約16%、重負荷でほぼ29%の測定トルクリップル低減を一貫して達成しました。代償としては高いスイッチング周波数とわずかな計算時間の増加がありますが、どちらも一般的な産業規模の制限内に収まります。
将来の電動駆動にとっての意義
平たく言えば、本研究は小さくよく訓練されたニューラルネットワークが、ドライバーのトルク要求とモータの間に賢いフィルタとして働き、スイッチドリアクタンスモータ内部に本来ある多くのパルス成分を打ち消すように指令を再形成できることを示しています。ネットワークは単純で一度だけ学習され、最適化されたスイッチング角と組み合わせることで、全体の制御はリアルタイムのハードウェア実装に実用的なままです。電気自動車や他の高要求な用途において、このアプローチはモータ自体を再設計することなく堅牢で磁石を使わないモータを用い、振動を低減し走行品質を向上させる道を提供します。
引用: Saleh, A.L., Hamouda, M., Számel, L. et al. Wavelet neural network based reduced-ripple DITC of switched reluctance motors in electric vehicles. Sci Rep 16, 15564 (2026). https://doi.org/10.1038/s41598-026-46371-7
キーワード: スイッチドリアクタンスモータ, トルクリップル, 電気自動車駆動, ニューラルネットワーク制御, モータ制御の最適化