Clear Sky Science · pt
Pesquisa sobre método inteligente de montagem de porcas de cavidade profunda de motores aéreos baseado em controle de torque-ângulo
Por que apertar peças ocultas do motor é importante
No interior de um motor a jato, fora da vista dos mecânicos, porcas enormes prendem partes rotativas para que não se soltem a milhares de rotações por minuto. Acertar o aperto desses fixadores é crucial: frouxos demais e o motor pode vibrar e se destruir; apertados demais e peças caras podem rachar. Este artigo explora como apertar uma grande porca enterrada quase um metro dentro do rotor de um motor aeronáutico de forma mais precisa e eficiente, e descreve uma nova ferramenta inteligente que pode ver, pensar e ajustar enquanto trabalha.
Problemas com fixadores pesados e ocultos
Motores a jato modernos dependem de conexões rosqueadas para manter discos e eixos do rotor unidos enquanto transmitem forças enormes e resistem a altas temperaturas e vibração. Uma tarefa especialmente difícil é apertar porcas de alto torque numa cavidade profunda e estreita do rotor de baixa pressão. Os mecânicos devem atingir torques em torno de dois mil newton‑metros e alinhar ranhuras de travamento que impedem o afrouxamento da porca, tudo sem linha de visão direta. Métodos tradicionais que dependem apenas de medições de torque são muito sensíveis ao atrito e à condição da superfície, frequentemente causando grandes incertezas na força de aperto real que mantém as peças unidas. O alinhamento manual dentro da cavidade é lento, de difícil repetição e apresenta risco de colisões que podem danificar componentes caros.
Observando de perto como as superfícies realmente se tocam
Para entender por que a força de aperto varia tanto, os autores primeiro estudaram a rugosidade microscópica das roscas da porca e do eixo. Em vez de serem lisas, essas superfícies se assemelham a cadeias de pequenas montanhas. A equipe utilizou uma descrição matemática de superfícies rugosas e auto‑semelhantes, juntamente com teoria clássica de contato, para modelar como esses picos minúsculos se deformam sob carga. Seus cálculos e simulações computacionais mostraram que, para superfícies usinadas típicas, apenas cerca de 12 a 18 por cento da área aparente da rosca realmente entra em contato. Esse padrão de contato descontínuo ajuda a explicar por que a força gerada por um dado torque de aperto pode flutuar amplamente, e por que modelos que assumem superfícies perfeitamente lisas superestimam a precisão.
Seguindo as forças através do calor e da rotação
Em seguida, os pesquisadores construíram um modelo digital detalhado da porca, do eixo e das peças aprisionadas para ver como a força de aperto muda quando o motor está quente e girando. Usando simulações por elementos finitos, combinaram carregamento mecânico, temperatura e efeitos centrífugos similares às condições reais de operação. À medida que o metal aquece a várias centenas de graus Celsius, ele amolece e se expande, redistribuindo tensões por mais filetes e reduzindo a força de aperto. Ao mesmo tempo, a rotação faz com que o eixo se expanda radialmente e encurte ligeiramente, aliviando ainda mais a carga nas roscas. O estudo concluiu que a temperatura tem o efeito mais forte e que, juntamente com a rotação, pode reduzir a pré‑carga em quase um quarto. Com base nesses resultados, a equipe projetou um ângulo específico de "sobreaperto" e uma margem de pré‑carga para que, após o motor aquecer e girar, a força de aperto remanescente permaneça dentro de uma faixa segura.
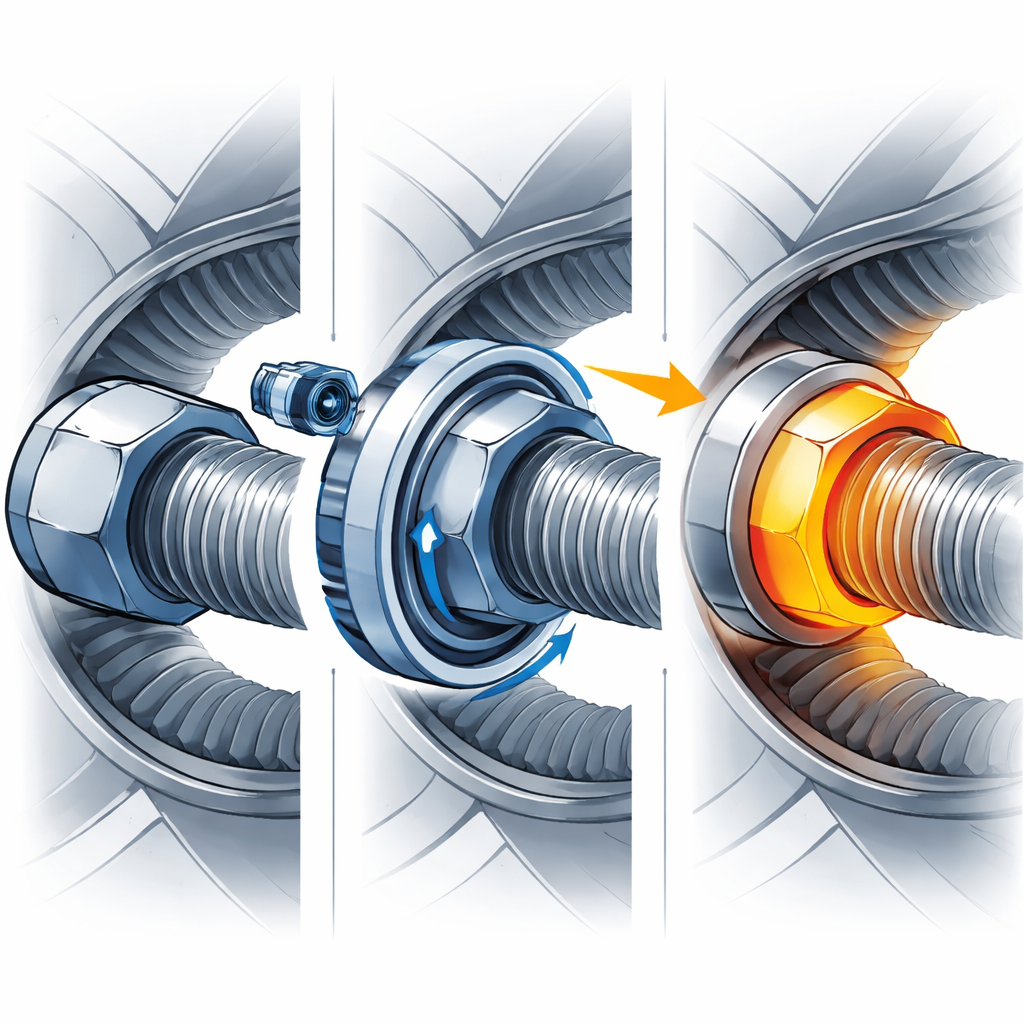
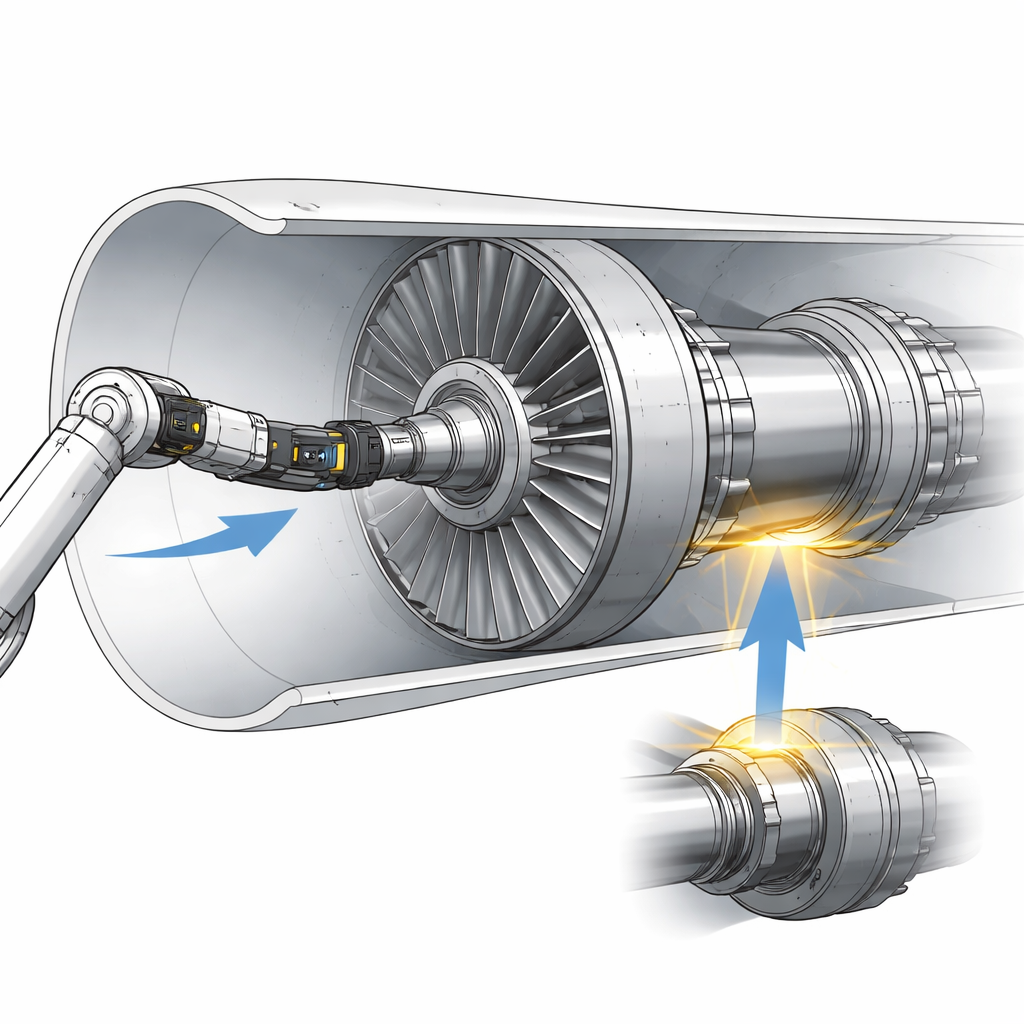
Uma ferramenta inteligente que vê e ajusta enquanto aperta
Munidos desse entendimento, os autores desenvolveram um novo sistema de aperto para cavidades profundas. Ele usa um eixo acionado por servo para aplicar alto torque, uma câmera em miniatura e um sensor de inclinação para observar as ranhuras de travamento, e uma estratégia controlada por computador que combina feedback de torque e ângulo de rotação. Em operação, a ferramenta é guiada pela longa cavidade por gabaritos especialmente moldados que evitam contato acidental com peças delicadas do motor. Primeiro ela aperta a porca sob controle de torque até atingir a faixa alvo, depois muda para controle preciso de ângulo para alinhar as ranhuras enquanto permanece dentro da janela de torque permitida. O sistema registra continuamente torque, rotação e a força de aperto prevista, e pode automaticamente aplicar um pequeno giro adicional para compensar a perda de pré‑carga esperada em alta temperatura e velocidade.
Comprovando os ganhos no banco de ensaio e na oficina
Experimentos em hardware representativo de motor mostraram que a nova abordagem melhora substancialmente o desempenho. Os modelos combinados de superfície e rigidez previram o comportamento global da junta com erros de apenas alguns por cento, e a estratégia de compensação manteve a força de aperto dentro de aproximadamente mais ou menos oito por cento do valor de projeto mesmo sob condições simuladas de calor e rotação. Em ensaios reais de montagem em vinte motores de teste, o sistema reduziu o tempo necessário para apertar cada porca de cavidade profunda de cerca de quatro horas para 2,6 horas, diminuiu a variação da pré‑carga em comparação com métodos manuais, alcançou alinhamento angular dentro de aproximadamente um quinto de grau e eliminou completamente eventos de colisão. Em uso em produção total, aumentou as taxas de aprovação na montagem e reduziu sucata e retrabalho em centenas de motores.
O que isso significa para motores mais seguros e inteligentes
Para um leitor não especialista, a mensagem principal é que os autores transformaram uma tarefa difícil e em grande parte manual em um processo controlado e orientado por dados. Ao reconhecer que superfícies rugosas tocam apenas em pequenas áreas, que calor e rotação relaxam gradualmente a força de aperto, e que ver e medir dentro de uma cavidade profunda é essencial, eles criaram um sistema visual e servo‑controlado de aperto que "sabe" quão apertada a porca deve ficar tanto agora quanto depois que o motor estiver em operação. O resultado são juntas mais confiáveis em peças rotativas críticas, montagem mais rápida e menos erros caros — um passo importante rumo a uma fabricação de motores a jato mais inteligente e confiável.
Citação: Liu, Z., Huang, X. & Tan, J. Research on intelligent assembly method of aero-engine deep-cavity nuts based on torque-angle control. Sci Rep 16, 11569 (2026). https://doi.org/10.1038/s41598-026-41867-8
Palavras-chave: montagem de motores aeronáuticos, uniões rosqueadas, controle torque-ângulo, fixadores de cavidade profunda, sistema visual de aperto