Clear Sky Science · nl
Een adaptief A*-algoritme voor bloedtransport met UAV’s
Waarom vliegend bloed ertoe doet
Als iemand dringend een bloedonderzoek of transfusie nodig heeft, kan elke minuut die in het verkeer verloren gaat het verschil tussen leven en dood betekenen. In veel steden vertragen volle wegen ambulances en koeriers, vooral wanneer monsters tussen ver uiteenliggende ziekenhuizen moeten worden vervoerd. Deze studie onderzoekt hoe kleine autonome vliegtuigen—drones—geleid kunnen worden langs veilige, efficiënte routes zodat ze bloed kunnen vervoeren over complexe landschappen zonder de batterij leeg te vliegen of verboden luchtruim te betreden. 
Van stadswegen naar luchtroutes
De auteurs richten zich op een zeer praktische vraag: hoe kunnen drones betrouwbaar bloed tussen ziekenhuizen vervoeren in een echt land, niet alleen in simulaties? Ze kijken naar Libanon, waar bergachtig terrein en druk verkeer snelle bezorging bemoeilijken. Drones kunnen recht over files heen vliegen, maar stuiten op twee harde grenzen. Ten eerste raken hun batterijen snel leeg, vooral wanneer ze zware, gekoelde bloedzakken meenemen. Ten tweede kunnen ze niet simpelweg in een rechte lijn vliegen, omdat hoge heuvels, dichtbebouwde steden en beperkt luchtruim in de weg kunnen liggen. Het artikel beschouwt het landschap als een driedimensionale puzzel en onderzoekt hoe paden gevonden kunnen worden die energie besparen en toch tijdig bloed op de juiste plaats afleveren.
Drones leren het landschap lezen
Om dit op te lossen passen de onderzoekers een bekend navigatiemodel aan: het A*-algoritme, dat doorgaans de kortste route op een plat kaartvlak vindt. Ze voeren gedetailleerde digitale kaarten in die de hoogte van het terrein op elk punt beschrijven en maken zo van het gebied een raster van kleine tegels, elk met een eigen elevatie. Het verbeterde algoritme meet echte 3D-afstanden, zodat het weet dat klimmen over een heuvel meer inspanning kost dan vliegen over een vlakke vlakte. Het controleert ook op obstakels, zoals no-fly zones, en sluit elke stap uit die deze zou kruisen. Naast puur afstandsverlies bouwt het team een energiemodel op basis van experimenten die laten zien dat klimmen extra vermogen vergt terwijl dalen iets minder verbruik vereist. Het algoritme geeft daarom de voorkeur aan routes die voorzichtig door het landschap kronkelen, waarbij een beetje extra afstand wordt geruild voor grote besparingen in batterijgebruik. 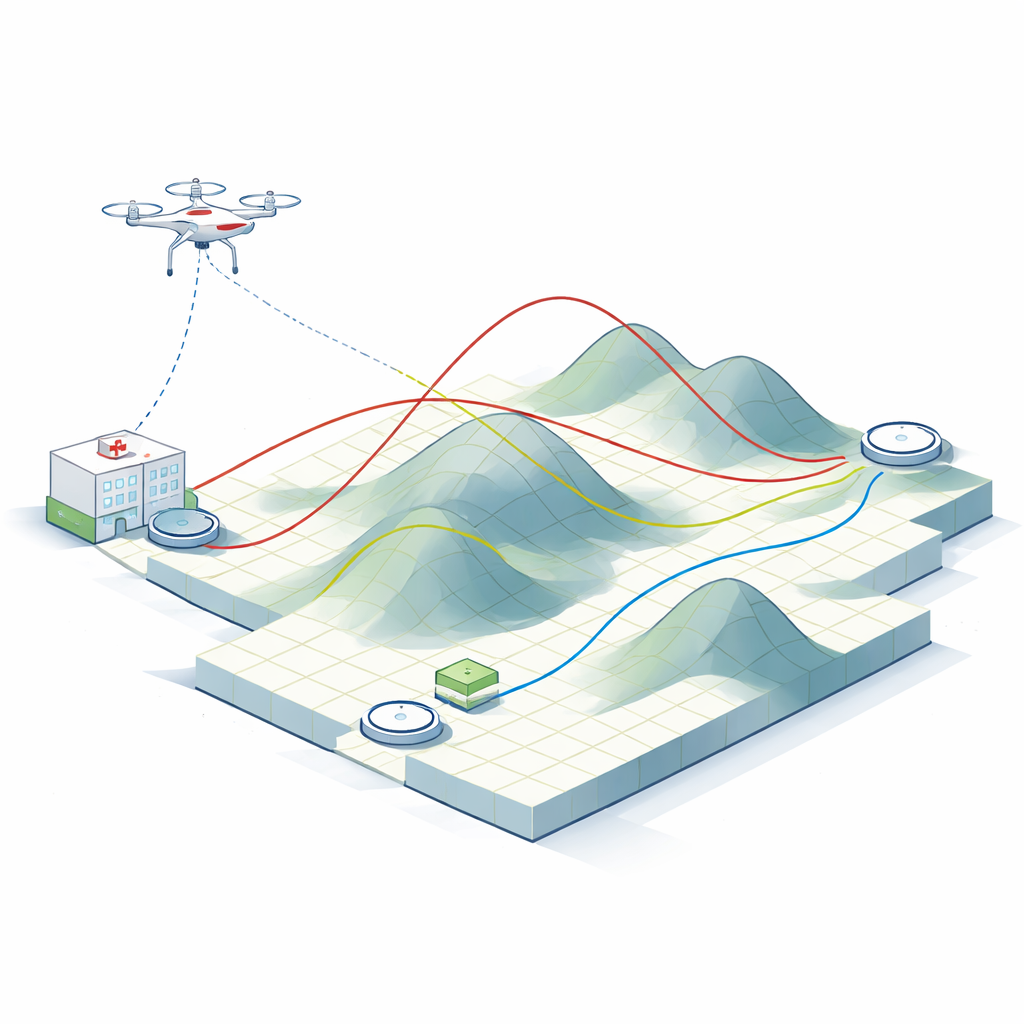
Plannen waar drones kunnen uitrusten
Zelfs met zorgvuldige routeplanning kunnen de huidige drones niet onbeperkt vliegen. De auteurs schatten hoe ver een veelgebruikt medisch drone‑type kan reizen met een typische bloedlading, rekening houdend met wind en veiligheidsmarges. Vervolgens koppelen ze de routeplanning aan een tweede probleem: waar laad- of batterijwisselstations te plaatsen. Met een clusteringtechniek groeperen ze ziekenhuizen die dicht bij elkaar liggen en kiezen centrale locaties die als gedeelde laadpunten kunnen dienen. Langs elke geplande route, wanneer de resterende batterij een volgende segment niet meer veilig zou kunnen dekken, kiest het systeem de dichtstbijzijnde realistische locatie—vaak een ziekenhuis of servicecentrum—als oplaadpunt in plaats van een afgelegen, ongeschikte plek op de kaart.
Het systeem op de proef stellen
Het raamwerk wordt getest op echte ziekenhuislocaties in Libanon. Het team vergelijkt meerdere vluchttactieken tussen twee verre ziekenhuizen: een onrealistisch perfecte rechte lijn en drie realistischer varianten die terrein en energiegebruik op verschillende manieren respecteren. Ze constateren dat de naïeve rechte lijn niet het meest batterijzuinig is zodra klimmen en dalen worden meegenomen. De best presterende aanpak start de drone op de werkelijke hoogte van het bronziekenhuis en beperkt onnodige hoogteveranderingen, waardoor het totale energieverbruik daalt. De studie toont ook aan dat een drone bij dezelfde reistijd doorgaans een kortere afstand kan overbruggen dan een auto die aan kronkelende wegen gebonden is, en dat hij onvoorspelbare vertragingen door files kan vermijden.
Wat dit betekent voor toekomstige medische vluchten
Concreet laat de studie zien dat slimme navigatie en een doordachte plaatsing van laadpunten drones kunnen transformeren van simpele gadgets tot betrouwbare leden van het medische transportteam. Door drones te leren “zien” waar heuvels, beperkte gebieden en hun eigen batterijlading liggen, helpt het voorgestelde systeem te waarborgen dat bloedmonsters en -producten snel, veilig en met voldoende reservevermogen aankomen. Hoewel het huidige werk uitgaat van vaste obstakels en enkelvoudige drones, legt het een basis voor toekomstige netwerken van samenwerkende medische drones die patiënten in zowel stedelijke als afgelegen gebieden kunnen bedienen.
Bronvermelding: Zaki, C., Taleb, H., Taki, M. et al. An adaptive A-Star algorithm to handle blood transportation using UAVs. Sci Rep 16, 13674 (2026). https://doi.org/10.1038/s41598-026-40040-5
Trefwoorden: medische drones, bloedtransport, routeplanning, energiezuinige vlucht, logistiek in de gezondheidszorg