Clear Sky Science · fr
Un algorithme A* adaptatif pour gérer le transport de sang par UAV
Pourquoi le transport aérien du sang compte
Lorsqu’une personne a besoin d’un test sanguin urgent ou d’une transfusion, chaque minute perdue dans les embouteillages peut coûter une vie. Dans de nombreuses villes, des routes surchargées ralentissent ambulances et coursiers, en particulier lorsque des prélèvements doivent circuler entre des hôpitaux éloignés. Cette étude examine comment de petits aéronefs autonomes — des drones — peuvent être guidés le long d’itinéraires sûrs et efficaces pour transporter du sang à travers des paysages complexes sans tomber à court de batterie ni pénétrer des espaces aériens interdits. 
Des rues de la ville aux couloirs aériens
Les auteurs se concentrent sur une question très concrète : comment les drones peuvent-ils acheminer de manière fiable du sang entre hôpitaux dans un pays réel, et pas seulement en simulation ? Ils étudient le Liban, où le relief montagneux et la circulation dense compliquent les livraisons rapides. Les drones peuvent survoler directement les zones encombrées, mais ils sont soumis à deux limites majeures. D’une part, leurs batteries se déchargent rapidement, surtout lorsqu’ils transportent des poches de sang lourdes et réfrigérées. D’autre part, ils ne peuvent pas toujours voler en ligne droite : collines élevées, zones urbaines denses et espaces aériens restreints peuvent se trouver sur leur trajectoire. L’article considère le paysage comme un puzzle tridimensionnel et cherche comment trouver des trajectoires économes en énergie tout en assurant la livraison du sang à temps.
Apprendre aux drones à lire le relief
Pour résoudre ce problème, les chercheurs adaptent une méthode de navigation bien connue, l’algorithme A*, qui trouve normalement le plus court chemin sur une carte plane. Ils l’alimentent avec des cartes numériques détaillées décrivant l’altitude du terrain en chaque point, transformant la région en une grille de petites cellules, chacune avec sa propre élévation. L’algorithme amélioré mesure les distances réelles en 3D, de sorte qu’il sait que franchir une colline coûte plus d’effort que survoler une plaine plate. Il vérifie aussi les obstacles, comme les zones d’exclusion aérienne, et rejette tout mouvement qui les traverserait. Au‑delà de la simple distance, l’équipe construit un modèle énergétique basé sur des expériences montrant que la montée consomme plus d’énergie tandis que la descente en consomme légèrement moins. L’algorithme privilégie donc des itinéraires qui serpentent doucement dans le relief, échangeant un peu de distance supplémentaire contre de fortes économies de batterie. 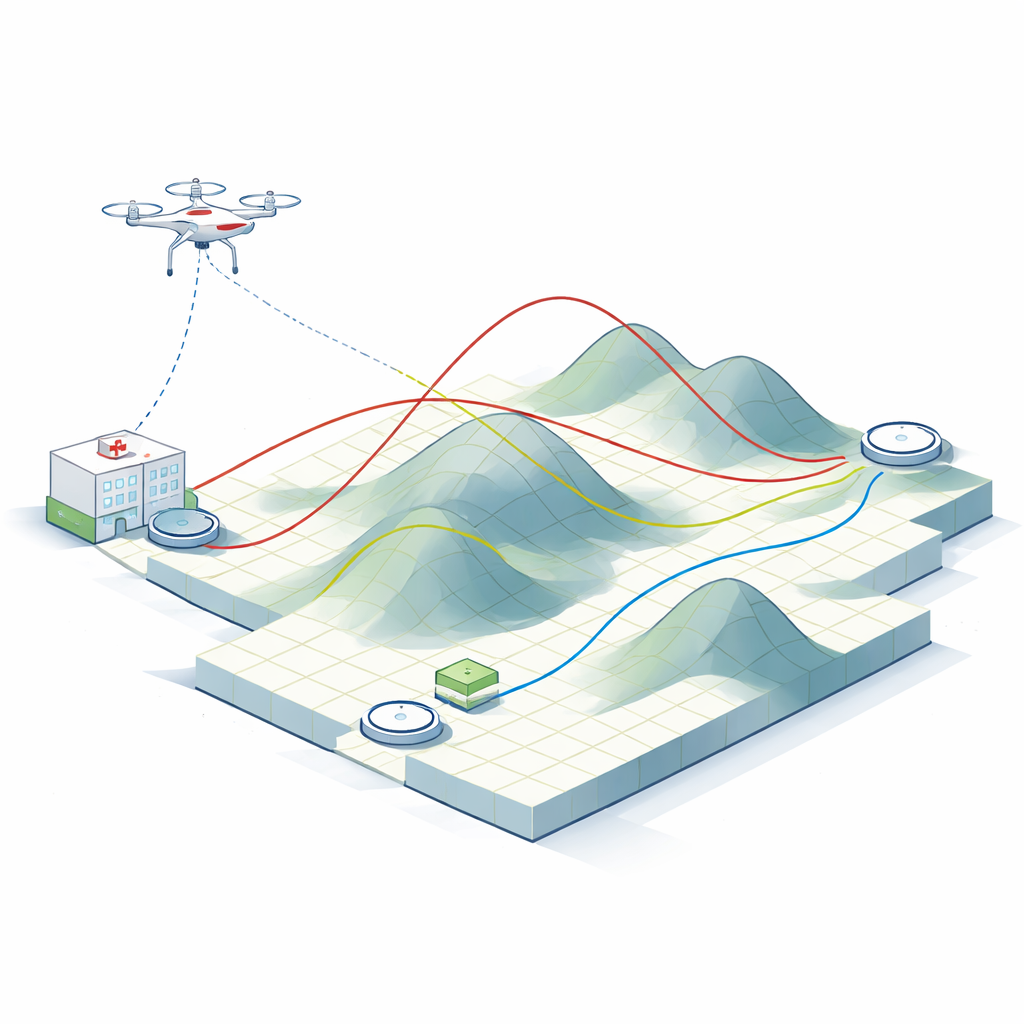
Planifier où les drones peuvent reprendre leur souffle
Même avec un routage soigné, les drones actuels ne peuvent pas voler indéfiniment. Les auteurs estiment la distance qu’un drone médical courant peut parcourir en transportant une charge sanguine typique, en tenant compte du vent et des marges de sécurité. Ils associent ensuite l’étape de planification d’itinéraire à un second problème : où installer des stations de recharge ou d’échange de batteries. À l’aide d’une technique de regroupement, ils groupent les hôpitaux proches les uns des autres et choisissent des sites centraux pouvant servir de hubs de recharge partagés. Sur un itinéraire planifié, lorsque la batterie restante ne permettrait plus de couvrir sans risque le segment suivant, le système choisit l’emplacement réaliste le plus proche — souvent un hôpital ou un centre de service — pour servir d’escale de recharge plutôt qu’un point distant et inutilisable sur la carte.
Mettre le système à l’épreuve
Le cadre est testé sur des emplacements d’hôpitaux réels au Liban. L’équipe compare plusieurs stratégies de vol entre deux hôpitaux éloignés : un trajet en ligne droite irréaliste, et trois versions plus réalistes qui tiennent compte du relief et de la consommation d’énergie de différentes manières. Ils constatent que la ligne droite naïve n’est pas la plus efficiente en batterie une fois les montées et descentes prises en compte. L’approche la plus performante fait démarrer le drone à la vraie altitude de l’hôpital source et limite les changements d’altitude inutiles, réduisant ainsi la consommation énergétique globale. L’étude montre aussi que, pour la même vitesse de déplacement, un drone peut généralement couvrir une distance plus courte qu’une voiture contrainte à des routes sinueuses, et qu’il peut éviter les retards imprévisibles causés par les embouteillages.
Ce que cela signifie pour les vols médicaux de demain
Concrètement, l’étude montre que la navigation intelligente et le positionnement réfléchi des points de recharge peuvent transformer des drones de simples gadgets en membres fiables de la logistique médicale. En apprenant aux drones à « voir » les collines, les zones restreintes et leurs propres limites de batterie, le système proposé contribue à garantir que les échantillons et produits sanguins arrivent rapidement, en toute sécurité et avec une marge de puissance suffisante. Bien que le travail actuel suppose des obstacles fixes et des vols monodrones, il pose les bases de futurs réseaux de drones médicaux coopératifs capables de desservir patients des villes comme des régions reculées.
Citation: Zaki, C., Taleb, H., Taki, M. et al. An adaptive A-Star algorithm to handle blood transportation using UAVs. Sci Rep 16, 13674 (2026). https://doi.org/10.1038/s41598-026-40040-5
Mots-clés: drones médicaux, transport de sang, planification d'itinéraire, vol économe en énergie, logistique de santé