Clear Sky Science · ja
センサー内計算を備えたナノ秒遅延の全光ファイバセンシング
稲妻のように速く感知する光
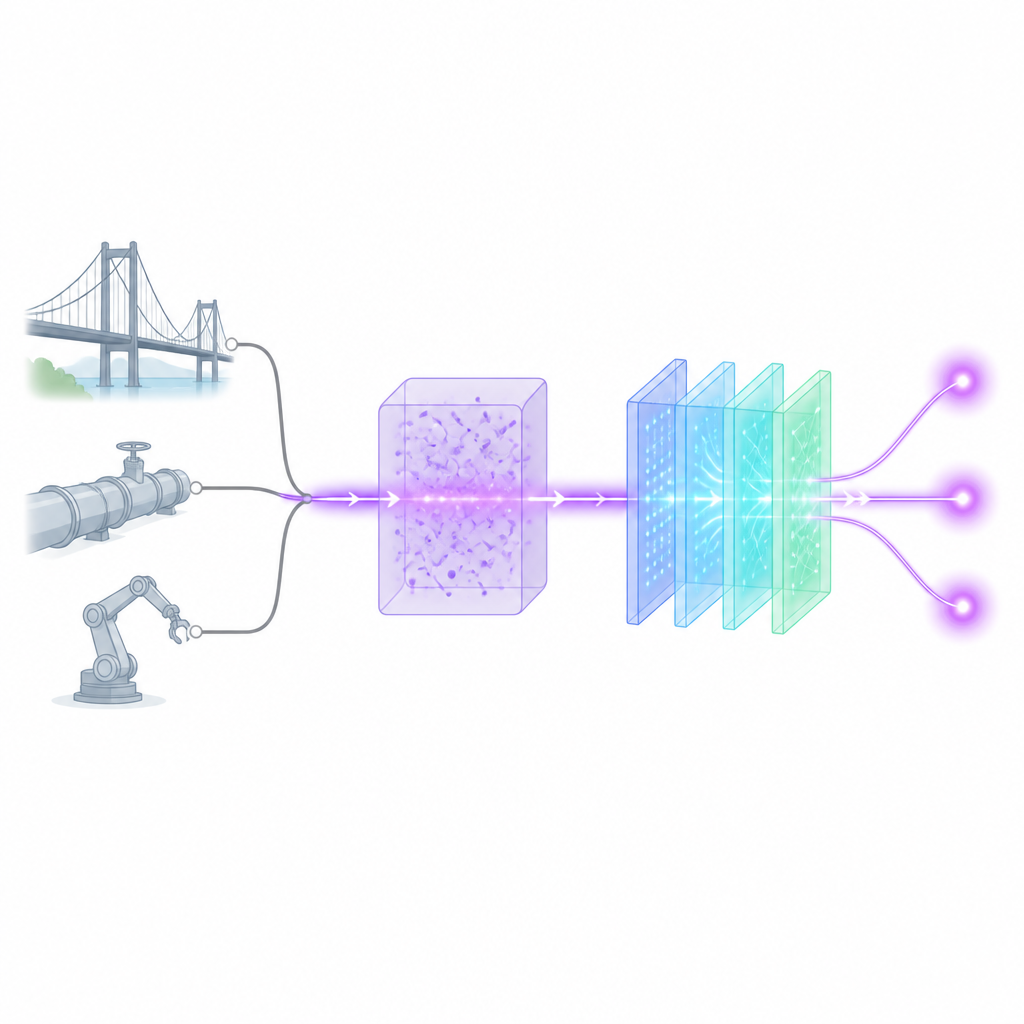
橋梁やパイプライン、ロボットが、電力を大量に消費する電子機器に頼らずに、ほとんど発生と同時に微小なひずみやねじれを感じられる世界を想像してみてください。本研究は、光ファイバ内部で光自身がセンシングと計算を行う方法を提案し、応答時間をナノ秒台まで短縮し、大がかりな計算ハードウェアの必要性を減らします。
ファイバは優れているが、電子機器が足を引っ張る
光ファイバは、トンネルや鉄道から油井や航空機に至るまで温度、振動、ひずみなどの監視に広く使われています。細く、電磁干渉に強く、数キロメートルにわたって伸ばせるという利点があります。しかし現在のシステムは仕事を二分しており、ファイバが光として信号を集めた後、それを電子機器が電気信号に変換し、重いデジタルアルゴリズムで解析します。この変換と処理が遅延を生じさせ、多くの場合マイクロ秒以上かかり、強力なプロセッサや専用の信号解析器などエネルギーを消費する装置が必要になります。
センサー内部で光に計算をさせる
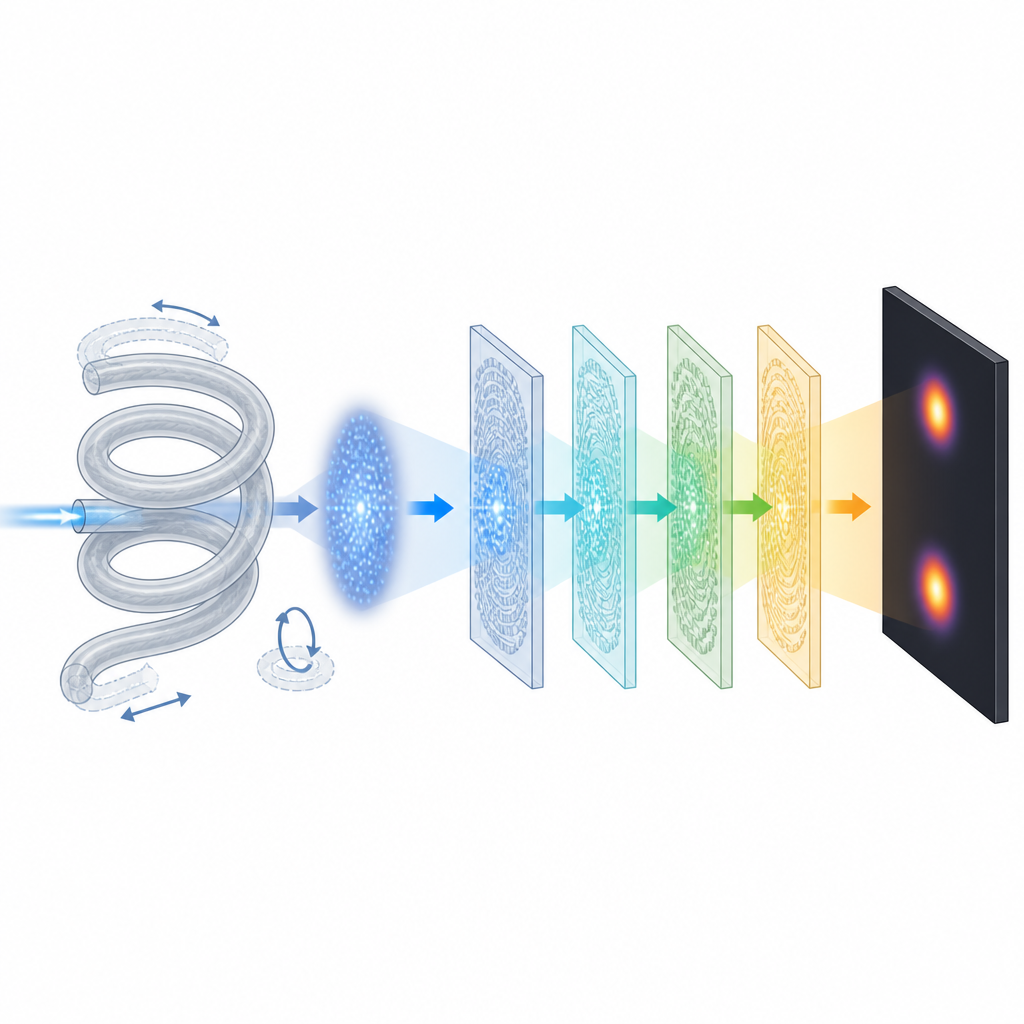
研究者らは、AOFS-IC(in-sensor computingを備えた全光ファイバセンシング)と呼ぶ全光アーキテクチャを提案します。光信号を電子機器に送って復号する代わりに、システムはすべてを光学領域内で完結させます。センシングファイバから出た光はまず、多モードファイバのような選定された散乱媒を通ります。ひずみ、曲げ、温度による波長・偏光・強度の微小変化は精緻なスペックルパターンに変換されます。これらのスペックルは位相変調層で構成された回折光学ネットワークを通り、そのネットワークは訓練されているため、出力光パターンの特定スポットの明るさが測定対象の物理量(例えばひずみやねじれ)と単純でほぼ線形な関係を持つようになります。基本的な光検出器はこれらのスポットの光強度を読み取り、デジタル復調なしに直接センシング結果を報告できます。
ひずみやねじれが同時に多くの信号へ
性能を検証するため、チームは標準的なファイバブラッグ格子センサを用いました。これは引き伸ばされると反射波長が変化します。従来のスペクトルアナライザの代わりに、反射光を光学計算モジュールに通しました。得られた出力強度は広い範囲でひずみを追跡し明瞭な線形傾向を示し、ピコメートル単位の波長変化やマイクロストレイン単位の伸びを検出でき、従来の機器に匹敵する分解能を示しました。さらに、同じ手法でねじれた多モードファイバの離散的な回転角を9状態で完全に分類できることを示しました。出力面を領域に分割することで、各ねじれ角は異なる領域に明るいスポットを生じさせ、数字を扱うプロセッサの代わりに光のパターンで動作する全光分類器のように機能しました。
多地点での複数変化を同時に観察
このアプローチの重要な強みは、単一のスペックルパターンが異なる種類の変化やファイバに沿った位置に関する情報を同時に埋め込める点です。概念実証実験では、1区画の多モードファイバを2つのセンサとして同時に使い、ある領域はねじり、別の領域は伸張させました。散乱媒と回折ネットワークを通した後、出力光には2つの別々の明るい領域が現れ、それぞれの強度からねじれ角とひずみを独立に、範囲の数パーセント程度の誤差で得られました。適切な検出器を選べば、単一フォトダイオードで高速測定に注力するか、アレイを用いて多数の検出点を並列に処理するかを選べます。単一フォトダイオードを用いた場合、狭いレンジでナノストレイン分解能を達成し、検出器の帯域幅の限界まで振動を追跡しました。
よりスマートな機械への光学センシングの導入
実世界での利用例として、著者らは単一の多モードファイバを三関節ロボットアームの関節に沿って巻き付けました。関節が回転するとファイバが曲がり、その内部の光が変化します。AOFS-ICはこれらの変化を3つの別個の光スポットに変換し、それぞれが1関節の角度に対応しました。システムは3関節を同時に監視しつつ各角度を数度内で推定できました。復調が純粋に光と単純な検出器で行われるため、この手法は組み込み向けの低遅延センシングに適しており、ロボットの主プロセッサに大きな負荷をかけません。原理的には、同じファイバと光学モジュールがアームの監視だけでなくフィードバック制御ループにも参加するよう発展し得ます。
将来のセンシングにとっての意義
本研究は、ファイバセンサにおける信号処理の多くを電子機器から光自身に移行できる可能性を示しています。散乱を利用して微小変化を豊かなスペックルパターンに変え、訓練された回折光学でそのパターンを読みやすい強度に翻訳することで、AOFS-ICは3ナノ秒未満の復調遅延を達成しつつ、精度も既存の機器と競合します。一般読者への要点は、ファイバ内の光が感知と計算の両方を担えるようになり、構造物や機械、ロボットの監視をより高速かつエネルギー効率良く行える可能性があるということです。
引用: Tao, Y., Wan, Y., Long, Z. et al. Nanosecond-latency all-optical fiber sensing with in-sensor computing. Light Sci Appl 15, 251 (2026). https://doi.org/10.1038/s41377-026-02265-x
キーワード: 光ファイバセンシング, 全光計算, スペックルパターン, ひずみセンシング, ロボットアーム監視