Clear Sky Science · ar
استشعار ألياف بصري بزمن تأخير نانوي مع حوسبة داخل المستشعر
ضوء يستشعر بسرعة البرق
تخيل عالماً تستطيع فيه الجسور والأنابيب والروبوتات أن تشعر بالانفعالات والالتواءات الطفيفة فور حدوثها تقريباً، من دون الاعتماد على إلكترونيات تستهلك طاقة كبيرة. تقدم هذه الدراسة طريقة تجعل الضوء نفسه يقوم بعملية الاستشعار والمعالجة داخل الألياف البصرية، مما يقلص زمن الاستجابة إلى أجزاء من مليار من الثانية ويقلل الحاجة إلى أجهزة حوسبة ضخمة.
لماذا الألياف ممتازة، لكن الإلكترونيات تعيقها
تُستخدم الألياف البصرية حالياً على نطاق واسع لمراقبة الحرارة والاهتزاز والإجهاد وتغيرات فيزيائية أخرى في أنفاق وسكك حديد وآبار نفط وطائرات. فهي رفيعة، ومحصنة ضد التداخل الكهرومغناطيسي، وقادرة على الانتشار لعدة كيلومترات. لكن الأنظمة الحالية تقسّم المهمة إلى جزأين: تجمع الألياف الإشارات على شكل ضوء، ثم تحول الإلكترونيات هذا الضوء إلى إشارات كهربائية وتنفذ خوارزميات رقمية مكثفة لتحديد ما يحدث. تسبّب عمليات التحويل والمعالجة هذه تأخيرات، غالباً أعلى من الميكروثانية، وتتطلب معالجات قوية وأدوات تحليل إشارات متخصصة تستهلك قدراً كبيراً من الطاقة.
جعل الضوء يقوم بالحوسبة داخل المستشعر
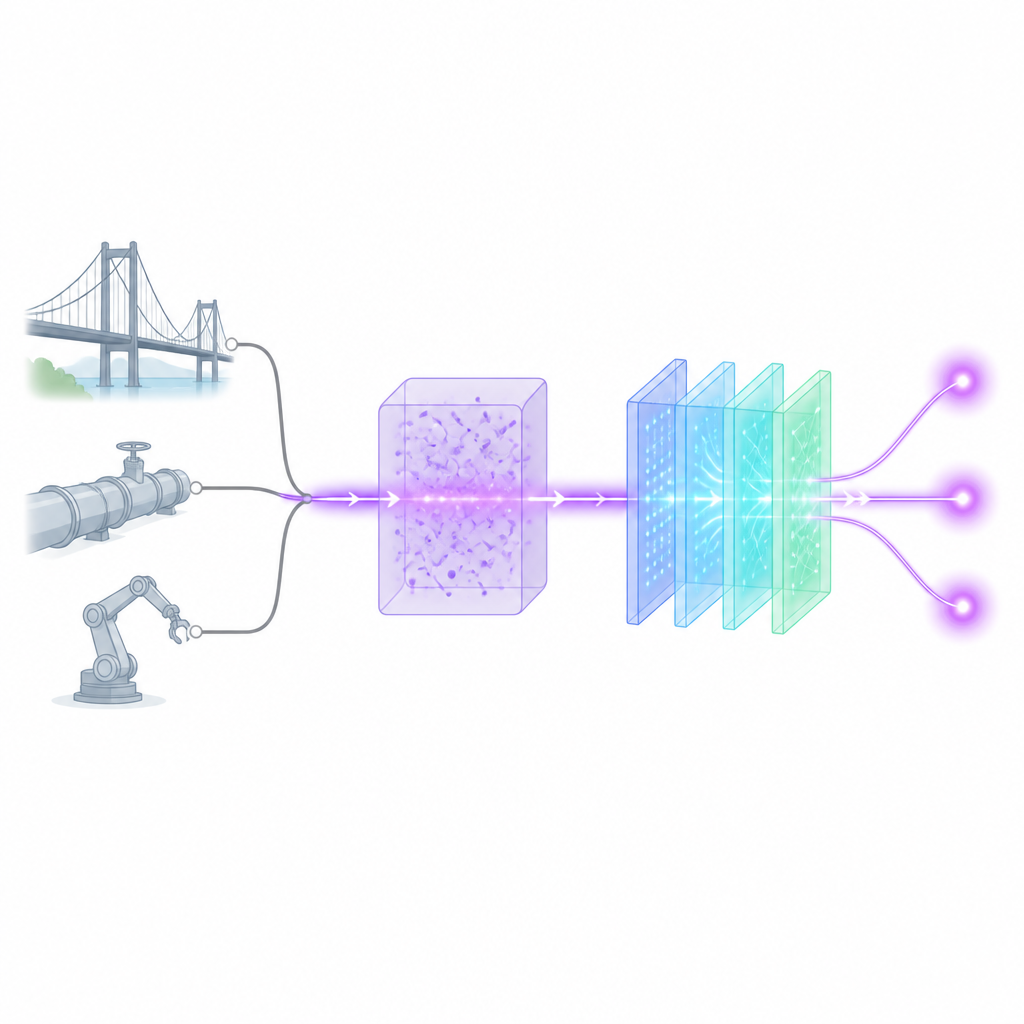
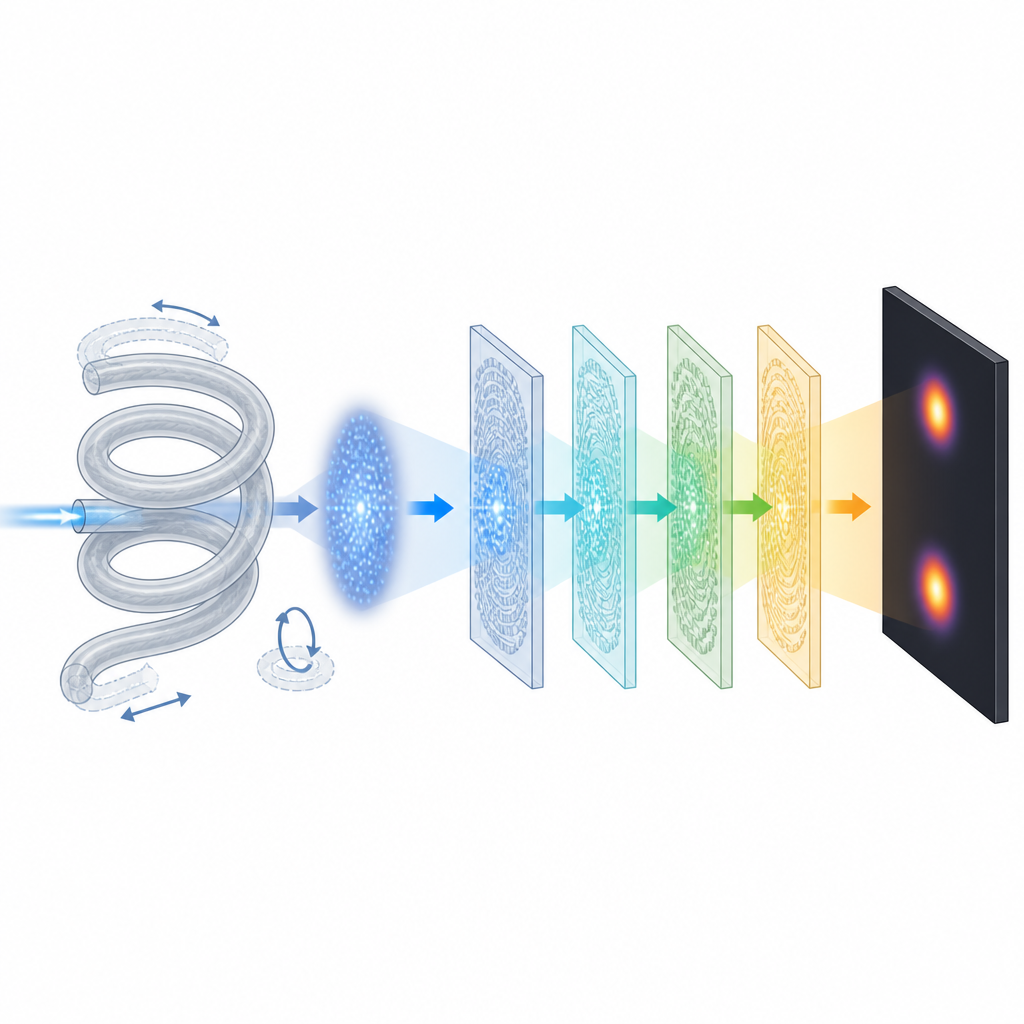
يقترح الباحثون بنية استشعار ألياف بصرية شاملة مع حوسبة داخل المستشعر، أطلقوا عليها AOFS-IC. بدلاً من إرسال إشارات الضوء إلى إلكترونيات لفك الترميز، يحتفظ النظام بكل المعالجة في المجال البصري. يمر الضوء القادم من ليف الاستشعار أولاً عبر وسط تشتت مُختار بعناية، مثل ليف متعدد النمط. تتحول التغيرات الصغيرة في الطول الموجي أو الاستقطاب أو الشدة الناتجة عن الإجهاد أو الانحناء أو الحرارة إلى أنماط بقع معقدة. تنتقل هذه البقع بعد ذلك عبر شبكة بصرية حيودية مكوّنة من طبقات معدّلة الطور. تم تدريب تلك الشبكة بحيث تتغير الشدة عند نقاط محددة في نمط خرج الضوء بطريقة بسيطة وشبه خطية مع الكمية الفيزيائية المقاسة، مثل الإجهاد أو الالتواء. عندئذ يمكن لكاشف ضوئي بسيط قراءة شدة الضوء عند تلك النقاط والإبلاغ مباشرة عن نتيجة الاستشعار دون حاجة إلى فك ترميز رقمي.
من الإجهاد والالتواء إلى عدة إشارات في وقت واحد
لاختبار فعالية الفكرة، ركب الفريق أولاً حساس قرص الشبكة البصرية (Fiber Bragg Grating) القياسي، الذي يغير لونه المنعكس عند تمطيطه. بدلاً من استخدام محلل طيف تقليدي، مرروا الضوء المنعكس عبر وحدة الحوسبة البصرية الخاصة بهم. تابعت شدة الخرج الناتج الإجهاد عبر نطاق واسع باتجاه خطي واضح واستطاعت تمييز تغييرات صغيرة بحجم بضعة بيكومترات في الطول الموجي أو بضعة ميكروإجهادات في التطرُّف، متنافسةً مع الأدوات التقليدية. وأظهروا أيضاً أن نفس النهج يمكنه تصنيف زوايا التواء منفصلة في ليف متعدد النمط بدقة تامة عبر تسع حالات مختلفة. عن طريق تقسيم مستوى الخرج إلى شبكة من المناطق، أنتجت كل زاوية التواء بُقعة ساطعة في منطقة مميزة، فعملت كأداة تصنيف بصرية شاملة تستخدم أنماط الضوء بدلاً من الأرقام على معالج.
مراقبة تغيُّرات متعددة في أماكن متعددة
قوة هذا النهج تكمن في أن نمط البقع الواحد يمكنه تضمين معلومات عن أنواع مختلفة من التغيرات وعن مواقع متعددة على طول الليف. في تجربة إثبات مفهوم، استخدم قسم واحد من ليف متعدد النمط كمستشعرين في وقت واحد: تم لف منطقة واحدة بينما تم شد منطقة أخرى. بعد المرور عبر الوسط المُشتت والشبكة الحيودية، احتوى ضوء الخرج على منطقتين ساطعتين منفصلتين، وكانت شدتهما تعطي زاوية الالتواء والإجهاد بشكل مستقل مع أخطاء لا تتجاوز بضع نسب مئوية من نطاقهما. باختيار كاشفات مناسبة، يمكن للنظام إما التركيز على قياسات عالية السرعة بكاشف ضوئي واحد أو التعامل مع نقاط استشعار متعددة بالتوازي باستخدام مصفوفات. مع كاشف ضوئي واحد، حقّق الإعداد دقة قياس نانواجهاد عبر نطاق ضيق وتعقب اهتزازات حتى حدود عرض نطاق الكاشف.
نقل الاستشعار البصري إلى آلات أذكى
لتوضيح استخدام عملي، لفّ المؤلفون ليفاً متعدد النمط على طول مفاصل ذراع روبوتية ذات ثلاثة مفاصل. مع دوران المفاصل، انحنى الليف وتغير الضوء المار بداخله. حول AOFS-IC هذه التغيرات إلى ثلاث بقع ضوئية منفصلة، كل واحدة تمثل زاوية مفصل. تمكن النظام من تقدير كل زاوية بدقة بضعة درجات أثناء مراقبة المفاصل الثلاثة معاً. وبما أن فك الترميز يحدث كلياً بالضوء وكواشف بسيطة، فإن الطريقة مناسبة للاستخدام المضمن والاستشعار منخفض التأخير الذي لا يثقل معالجات الروبوت الرئيسية. من الناحية النظرية، يمكن لذات الليف والوحدة البصرية أن تتطور ليس فقط لمراقبة الذراع بل أيضاً للمشاركة في حلقات التحكم الراجعة لها.
ماذا يعني هذا لمستقبل الاستشعار
تُظهر هذه الدراسة إمكانية نقل جزء كبير من معالجة الإشارات في حساسات الألياف من الإلكترونيات إلى الضوء نفسه. باستخدام التشتت لتحويل التغيرات الطفيفة إلى أنماط بقع غنية، وباستخدام بصريات حيودية مدرّبة لترجمة تلك الأنماط إلى شدات سهلة القراءة، تصل AOFS-IC إلى زمن فك ترميز أقل من 3 نانوثانية مع الحفاظ على دقة تنافس الأدوات المعروفة. بالنسبة للقارئ العام، الخلاصة الأساسية هي أن الضوء داخل الليف يمكنه الآن الاستشعار والحوسبة معاً، مما يبشر برقابة أسرع وأكثر كفاءة في استهلاك الطاقة للهياكل والآلات والروبوتات دون الاعتماد على أجهزة رقمية ثقيلة.
الاستشهاد: Tao, Y., Wan, Y., Long, Z. et al. Nanosecond-latency all-optical fiber sensing with in-sensor computing. Light Sci Appl 15, 251 (2026). https://doi.org/10.1038/s41377-026-02265-x
الكلمات المفتاحية: استشعار الألياف البصرية, الحوسبة البصرية الشاملة, نماذج البقع الضوئية, استشعار الإجهاد, مراقبة ذراع روبوتية