Clear Sky Science · en
Portable hip exoskeleton improves walking economy for stroke survivors
Helping Stroke Survivors Walk Farther with Less Effort
Walking even short distances can feel like a workout for many people who have survived a stroke. Because one side of the body is weakened, each step demands extra energy, leading to fatigue, slower walking, and reduced independence. This study explores a new wearable hip device that aims to make walking easier and less tiring for stroke survivors, potentially helping them stay active and engaged in everyday life.
Why Walking Is So Hard After a Stroke
After a stroke, many people develop a walking pattern in which one leg is weaker and stiffer than the other. They may have trouble pushing off with the ankle, swinging the leg forward, or keeping the knee stable. To avoid tripping, they often lift the hip higher or swing the leg outward in a wide arc. The stronger leg must work harder to compensate, and the result is an uneven, energy-hungry gait. On average, walking costs people with this condition about 60 percent more energy than it does healthy adults, which limits how far and how fast they can move in daily life.
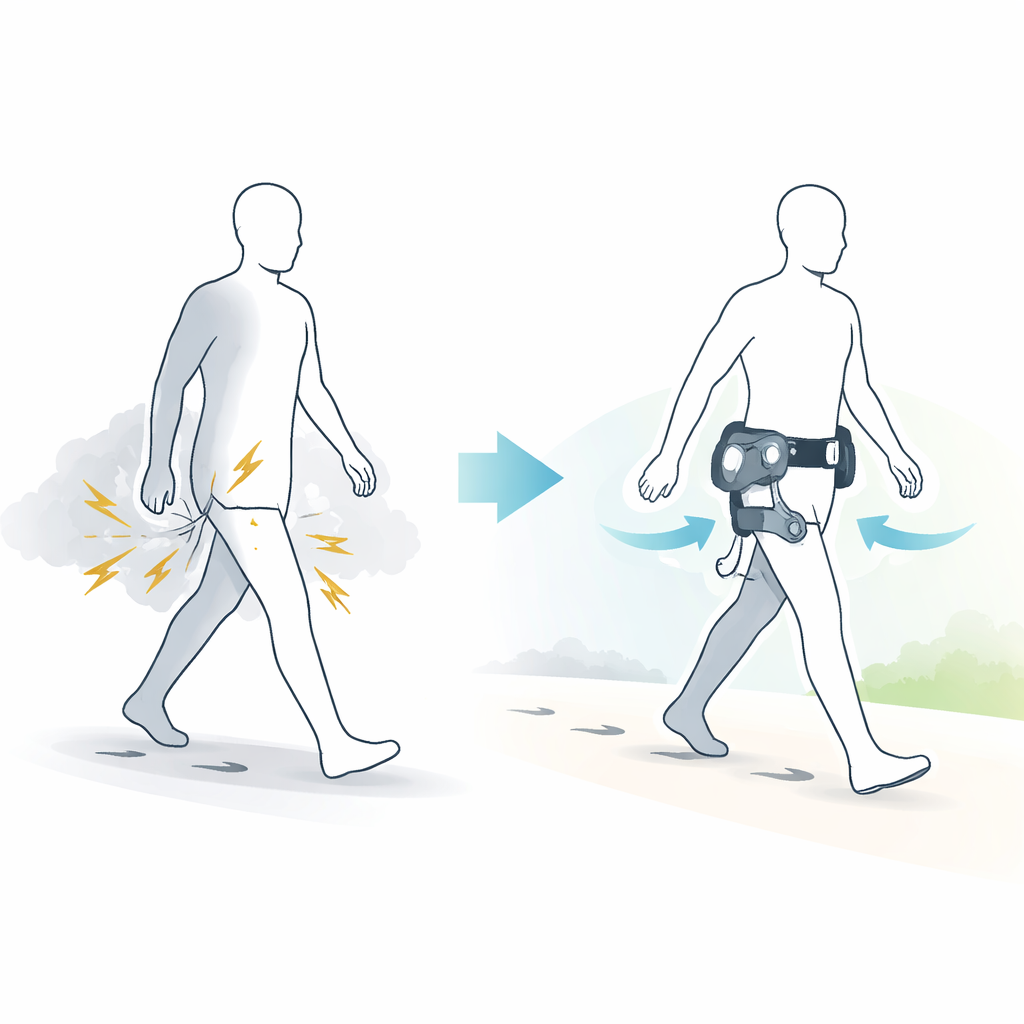
A New Kind of Wearable Help at the Hips
Engineers have spent years developing powered devices to help stroke survivors walk, most of them focusing on the ankle. These ankle devices can improve speed and foot clearance, but when built to be portable they have not succeeded in cutting the overall energy cost of walking. The research team behind this paper chose a different target: the hips. They designed a lightweight, battery-powered exoskeleton that straps around the pelvis and upper thighs and assists both hips—the weaker and the stronger side. Because it sits close to the body’s center of mass, its weight is less tiring to carry than similar hardware placed at the ankles.
Testing the Device on Real People
Seven adults living with long-term stroke-related weakness took part in the study. After several training sessions to get used to the device and fine-tune the assistance for comfort, each person walked on a treadmill at their own usual speed, first without the device and then with it powered on. While they walked, the researchers measured how much oxygen they used to estimate energy cost, and used motion sensors and force plates to calculate how much mechanical work their hip, knee, and ankle joints were doing.
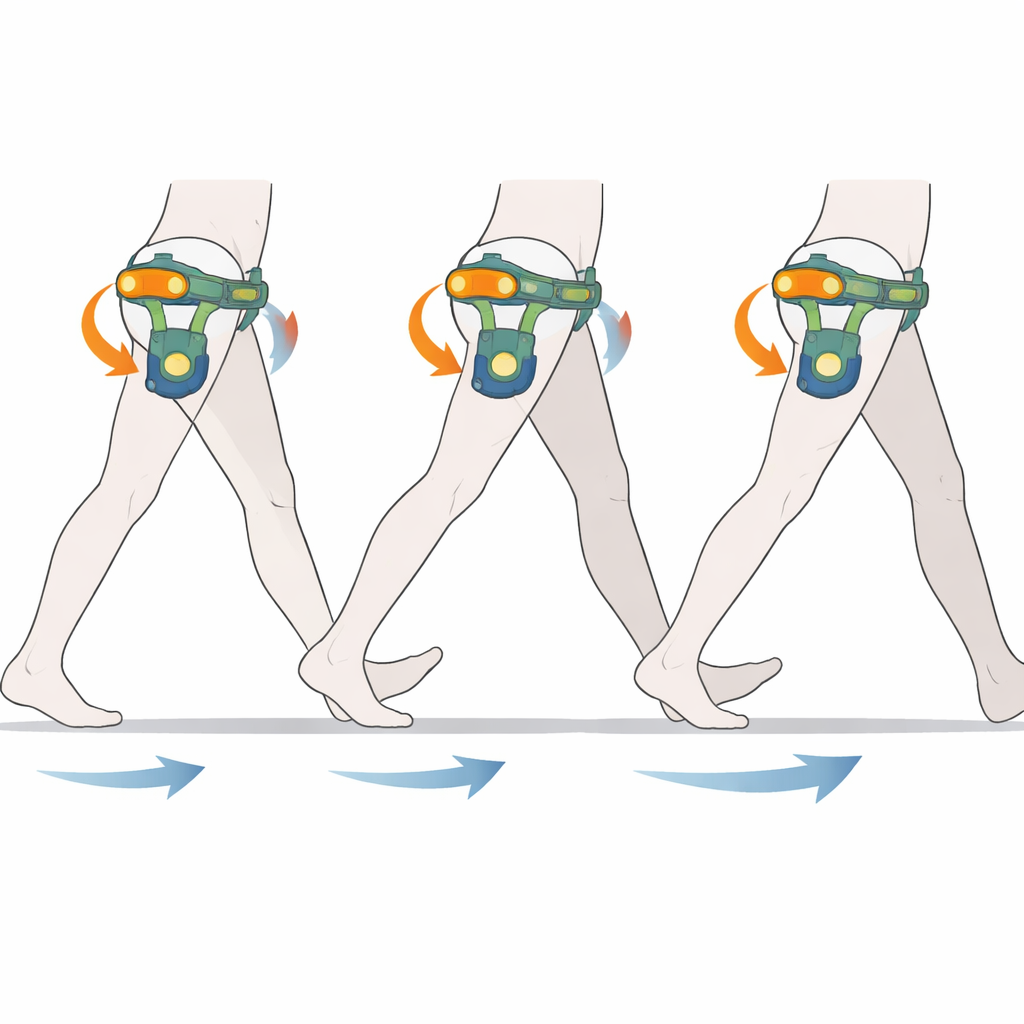
Less Effort from the Body, More Help from the Device
With the hip exoskeleton turned on, every participant used less energy to walk. On average, their net metabolic cost—the body’s internal fuel use beyond standing still—dropped by about 18 percent. That is roughly equivalent to a healthy person taking off a backpack weighing over 13 kilograms. The device took over some of the work normally done by the hip muscles, especially when pushing the body forward and swinging the leg through. The biological work done by the hips themselves fell by about 29 percent, while work at the knees and ankles stayed about the same. The exoskeleton also slightly increased how high the feet cleared the ground, which may lower the risk of tripping, and it improved the balance between how much work was done by the weaker and stronger sides.
What This Could Mean for Everyday Life
To a person living with stroke, an 18 percent energy saving could mean being able to walk farther before needing to rest, tackle hills or longer community distances, or participate more fully in work and social activities. The study shows, for the first time, that a portable hip exoskeleton can meaningfully reduce the effort of walking for stroke survivors, mainly by offloading the hard work normally demanded of the hip muscles. While the research was done on a treadmill with a small group and over short time spans, it points toward a future in which compact, hip-worn robots could become part of standard care to help people regain mobility and independence after stroke.
Citation: Pruyn, K., Murray, R., Gabert, L. et al. Portable hip exoskeleton improves walking economy for stroke survivors. Nat Commun 17, 2771 (2026). https://doi.org/10.1038/s41467-026-69580-0
Keywords: stroke rehabilitation, exoskeleton, assistive walking device, gait energy cost, hip robotics